Program.x200.pdf - 第86页
(2)Placement Data( (2)Placement Data( (2)Placement Data( (2)Placement Data( (2)Placement Data( ᅞ㺚ᭅ ᅞ㺚ᭅ ᅞ㺚ᭅ ᅞ㺚ᭅ ᅞ㺚ᭅ )(P-data) )(P-data) )(P-data) )(P-data) )(P-data) ⱙ㓫ࠋ ⱙ㓫ࠋ ⱙ㓫ࠋ ⱙ㓫ࠋ ⱙ㓫ࠋ Table 3B34 Table 3B34 Table 3B…
3.63.6
3.63.6
3.6
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
((
((
(
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩ
))
))
)
㓫ࠋᮎ⊪䰹ᅞ㺚ᭅ(P)ͼϣ “3.3 䞢Ḍᵔᔷ( ᳞㒙ঢ়䆛ࠀ) ”
ⳍৡȢ
( )( )
( )( )
( )
Pattern ProgramPattern Program
Pattern ProgramPattern Program
Pattern Program
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ߰ᓏֶᙄ
߰ᓏֶᙄ
•
ḌᵔᔷՠḌᵔᔷՠ
ḌᵔᔷՠḌᵔᔷՠ
Ḍᵔᔷՠ
Fig.3B 27Fig.3B 27
Fig.3B 27Fig.3B 27
Fig.3B 27
ᭉԨᭉԨ
ᭉԨᭉԨ
ᭉԨ
Fig.3B 28Fig.3B 28
Fig.3B 28Fig.3B 28
Fig.3B 28
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
( (
( (
(
ᬓᬓ
ᬓᬓ
ᬓ
))
))
)
•
ܘӋⱙܘӋⱙ
ܘӋⱙܘӋⱙ
ܘӋⱙ
XYXY
XYXY
XY
䗴ᑻ䗴ᑻ
䗴ᑻ䗴ᑻ
䗴ᑻ
((
((
(
ܘӋᭅᑨᭅܘӋᭅᑨᭅ
ܘӋᭅᑨᭅܘӋᭅᑨᭅ
ܘӋᭅᑨᭅ
))
))
)
C C
C C
C
C2C2
C2C2
C 2 : Full Speed(᮵ޤ䗴)
C3C3
C3C3
C3
C4C4
C4C4
C 4 : 20%Decr(ޤ䗴)
C5C5
C5C5
C5
C6C6
C6C6
C 6 : 50%Decr(ޤ䗴)
0107-001 2-67
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
33
33
3
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
ḌᵔᔷḌᵔᔷ
ḌᵔᔷḌᵔᔷ
Ḍᵔᔷ
22
22
2
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛᅞ㺚ഥᷜාޛ
ᅞ㺚ഥᷜාޛ
3.63.6
3.63.6
3.6
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
((
((
(
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩ
))
))
)
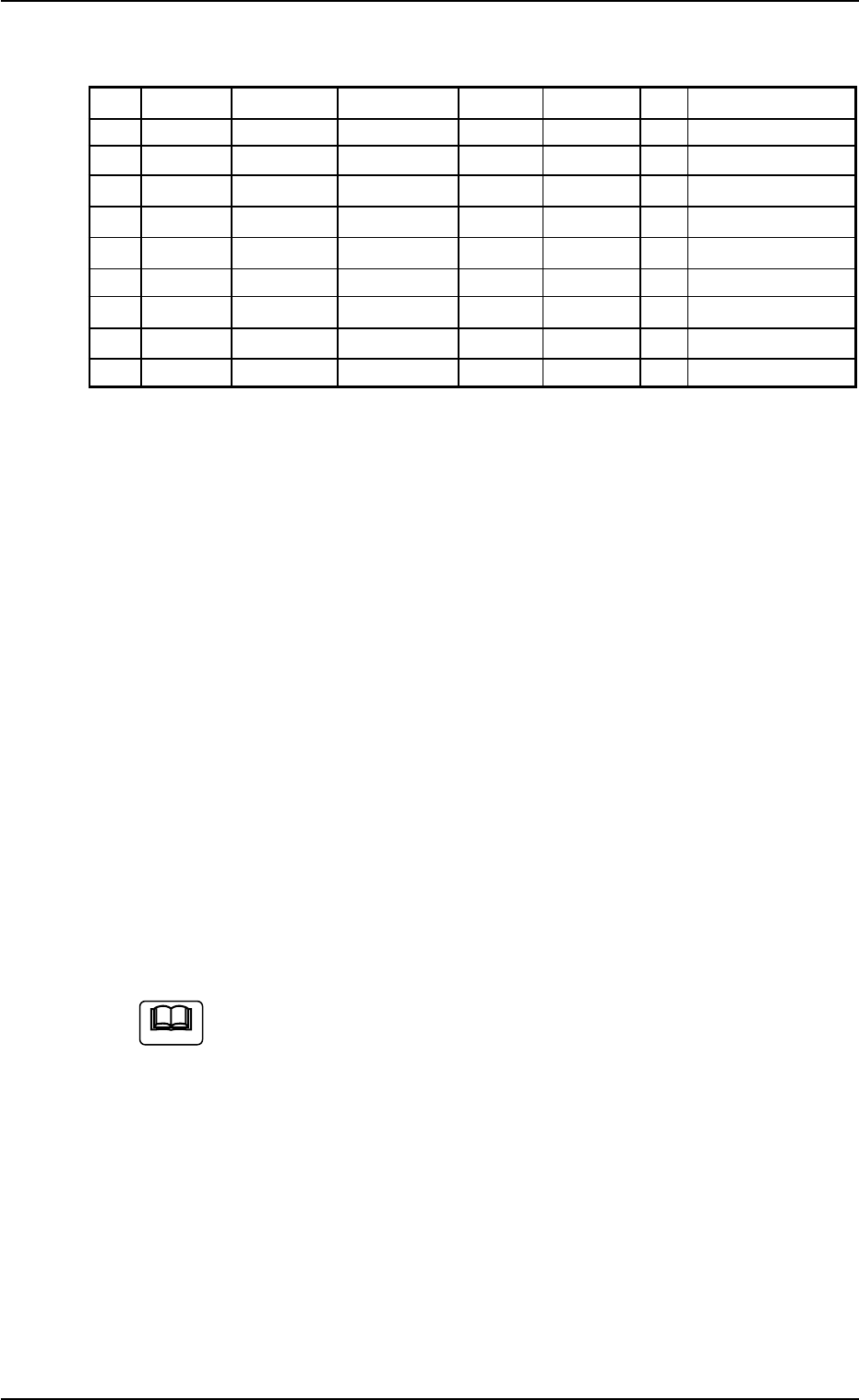
(2)Placement Data((2)Placement Data(
(2)Placement Data((2)Placement Data(
(2)Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(P-data))(P-data)
)(P-data))(P-data)
)(P-data)
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋⱙ㓫ࠋ
ⱙ㓫ࠋ
Table 3B34Table 3B34
Table 3B34Table 3B34
Table 3B34
P-No.P-No.
P-No.P-No.
P-No.
XX
XX
X
[mm][mm]
[mm][mm]
[mm]
Y[mm]Y[mm]
Y[mm]Y[mm]
Y[mm]
Z Z
Z Z
Z
H[mm]H[mm]
H[mm]H[mm]
H[mm]
Fdr. No.Fdr. No.
Fdr. No.Fdr. No.
Fdr. No.
CC
CC
C
CommentComment
CommentComment
Comment
XX
XX
X
Y Y
Y Y
Y
Z Z
Z Z
Z
+0.00+0.00
+0.00+0.00
+0.00
XXX XXX
XXX XXX
XXX
--
--
-
C C
C C
C
2 2
2 2
2
XX
XX
X
22
22
2
Y Y
Y Y
Y
22
22
2
Z Z
Z Z
Z
22
22
2
+0.00+0.00
+0.00+0.00
+0.00
XXX XXX
XXX XXX
XXX
--
--
-
C2 C2
C2 C2
C2
3 3
3 3
3
000.00000.00
000.00000.00
000.00
000.00 000000.00 000
000.00 000000.00 000
000.00 000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
000 000
000 000
000
22
22
2
4 4
4 4
4
XX
XX
X
33
33
3
Y Y
Y Y
Y
33
33
3
Z Z
Z Z
Z
33
33
3
+0.00+0.00
+0.00+0.00
+0.00
XXX XXX
XXX XXX
XXX
--
--
-
C3 C3
C3 C3
C3
5 5
5 5
5
XX
XX
X
44
44
4
Y Y
Y Y
Y
44
44
4
Z Z
Z Z
Z
44
44
4
+0.00+0.00
+0.00+0.00
+0.00
XXX XXX
XXX XXX
XXX
--
--
-
C4 C4
C4 C4
C4
6 6
6 6
6
000.00000.00
000.00000.00
000.00
000.00 000000.00 000
000.00 000000.00 000
000.00 000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
000 000
000 000
000
55
55
5
7 7
7 7
7
XX
XX
X
55
55
5
Y Y
Y Y
Y
55
55
5
Z Z
Z Z
Z
55
55
5
+0.00+0.00
+0.00+0.00
+0.00
XXX XXX
XXX XXX
XXX
--
--
-
C5 C5
C5 C5
C5
8 8
8 8
8
XX
XX
X
66
66
6
Y Y
Y Y
Y
66
66
6
Z Z
Z Z
Z
66
66
6
+0.00+0.00
+0.00+0.00
+0.00
XXX XXX
XXX XXX
XXX
--
--
-
C6 C6
C6 C6
C6
9 9
9 9
9
000.00000.00
000.00000.00
000.00
000.00 000000.00 000
000.00 000000.00 000
000.00 000
ȋȋ
ȋȋ
ȋ
0000
0000
00
ºº
ºº
º
+0.00+0.00
+0.00+0.00
+0.00
000 000
000 000
000
PP
PP
P
㓫ࠋ乏ᑤ㓫ࠋ乏ᑤ
㓫ࠋ乏ᑤ㓫ࠋ乏ᑤ
㓫ࠋ乏ᑤ
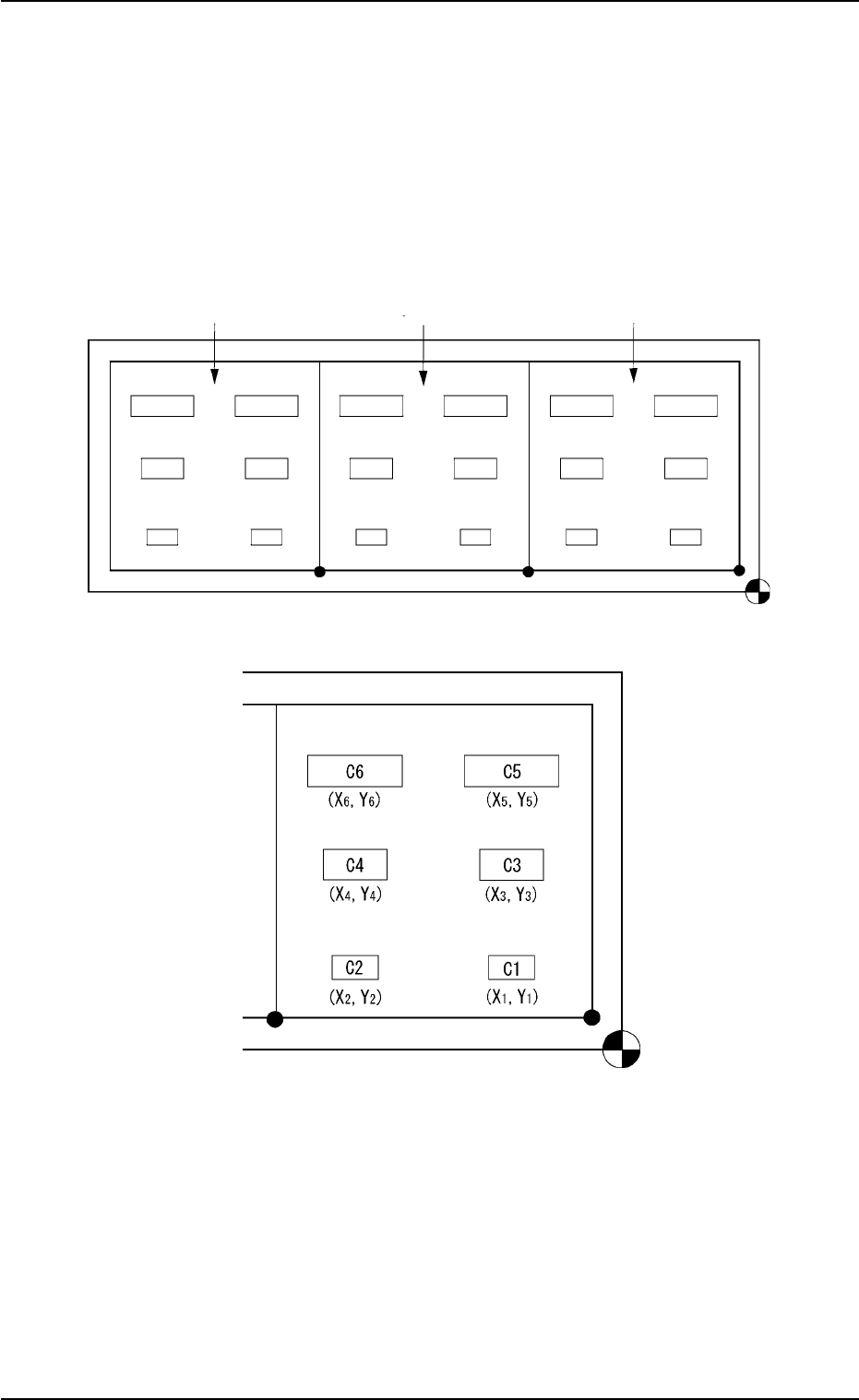
(2- )䇌Աߏϣ XY ⳍৡ䗴ᑻⱙܘӋ㒙Ȣ
ᣞܘӋ㒙ⱙޤ䗴ᇤ䆓㕃 P-No.℺偹( ޤ䗴᳕ᇤ㒙ܝ㸡) Ȣ
ℹՠЂͼCC2 䆓ᅯЏ P-No.Ђⱙ CC2Ȣ
(2-2) P-No.3 Ђ “2” টҫᭅ䇌䆓ᅯЏ “0(䳋)”Ȣ
ℹ℺偹៥Џ䗴ᑻ㒙ⱙएߛȢ
⊽⊽
⊽⊽
⊽Ί(a) 䗴ᑻ㒙ⱙएߛ℺偹Ϣᅞ㺚ܘӋȢ
(b) ℹࠋҹ “2 ” Ϣࠋ XY ⱙ䗴ᑻȢ
ӐᛤՔ⫽ “0 㟈 9 ” ⱙࠋҹȢ
ℹՠЂͼЏћ㸽⼏ P-No.4 ҺϠЏ 20% ޤ䗴ⱙܘӋͼ
Ք⫽ “2”Ȣ
(2-3)⫽ৡḌⱙᮎ⊪㓫ࠋҺϠⱙᭅȢ
• C3 C4 䆓ᅯ P-No.Ђ C4 C5Ȣ
• P-No.6 Ђ “5 ” টҫᭅ䇌䆓ᅯЏ “0(䳋)”Ȣ
• C5 C6 䆓ᅯ P-No.Ђ C7 C8Ȣ
(2-4)㓫ࠋ᳕㒝℺偹䗯ᐍⱙᑤϕḌͼি᳞ C Ђ䇌ࡶᖚՔ⫽
“P”Ȣ
ԛᅳ䰚ⱙܘӋᅞ㺚乏ᑤབྷҺϠ䇉ᯣЏ “ קᑤ ”Ȣ
ϕϿ Pattern Program ݚ᳕ৄҺ㓫ࠋ 20 Ͽ䗴ᑻ㒙Ȣ
0107-001 2-68
Note
3.63.6
3.63.6
3.6
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
((
((
(
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩ
))
))
)

ܘӋᅞ㺚乏ᑤܘӋᅞ㺚乏ᑤ
ܘӋᅞ㺚乏ᑤܘӋᅞ㺚乏ᑤ
ܘӋᅞ㺚乏ᑤ
ңޤ䗴ᇦⱙ(XY 䗴ᑻ) ܘӋᓕྠᅞ㺚ͼབྷϠΊ
Ḍᵔᔷ (C ˧ C2)˧Ḍᵔᔷ 2(C ˧ C2)˧Ḍᵔᔷ 3(C ˧ C2)˧
Ḍᵔᔷ 3(C3 ˧ C4)˧Ḍᵔᔷ 2(C3 ˧ C4)˧Ḍᵔᔷ (C3 ˧ C4)˧
Ḍᵔᔷ (C5 ˧ C6)˧Ḍᵔᔷ 2(C5 ˧ C6)˧Ḍᵔᔷ 3(C5 ˧ C6)˧
Placement Data(Placement Data(
Placement Data(Placement Data(
Placement Data(
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅᅞ㺚ᭅ
ᅞ㺚ᭅ
)(O-data))(O-data)
)(O-data))(O-data)
)(O-data)
ᣞ✼䗯ᐍⱙᮎ⊪㓫ࠋȢ
ᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅ
ᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅ
ᕆઢᅞ㺚䗴ᑻⱙܘӋᭅᑨᭅ
ҺϠܘӋᭅᑨᭅдӯᕆઢᅞ㺚䗴ᑻͼᭁ䇌গ㗘Ȣ
Speed DataSpeed Data
Speed DataSpeed Data
Speed Data
Pick-Up[sec](ᅞ㺚༉䰙)ȡRotary turret[sec](ᅞ㺚
༉ӵ䗖ȡPlacement[sec](ᅞ㺚༉ᅞ㺚)ȡFeeder carriage
(䗖᭮ఽ⒦ᵔ)ȡRecognition time[sec](䆛ࠀᯋ䯉)
䗴ᑻᭅⱙ䆻㒛ݚᆎͼ䇌গ✼ⱙ᪢Ա䇉ᯣл “ ܘӋ
ᭅᑨ(TCM-X ㋐߬)”Ȣ
0107-001 2-69
Note
3.63.6
3.63.6
3.6
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ䞢Ḍᵔᔷ
䞢Ḍᵔᔷ
((
((
(
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩए㒙ᥧᑤᇎᑩ
ए㒙ᥧᑤᇎᑩ
))
))
)
((
((
(
䗴ᑻᭅ䗴ᑻᭅ
䗴ᑻᭅ䗴ᑻᭅ
䗴ᑻᭅ
))
))
)