Program.x200.pdf - 第45页
P.E.C. recognition mode image( P.E.C. recognition mode image( P.E.C. recognition mode image( P.E.C. recognition mode image( P.E.C. recognition mode image( ාᵔ䆛ࠀᮎ⊪ ාᵔ䆛ࠀᮎ⊪ ාᵔ䆛ࠀᮎ⊪ ාᵔ䆛ࠀᮎ⊪ ාᵔ䆛ࠀᮎ⊪ 㒙ঢ়䆛ࠀ 㒙ঢ়䆛ࠀ 㒙ঢ়䆛ࠀ 㒙ঢ়䆛ࠀ 㒙ঢ়䆛ࠀ ) ) )…
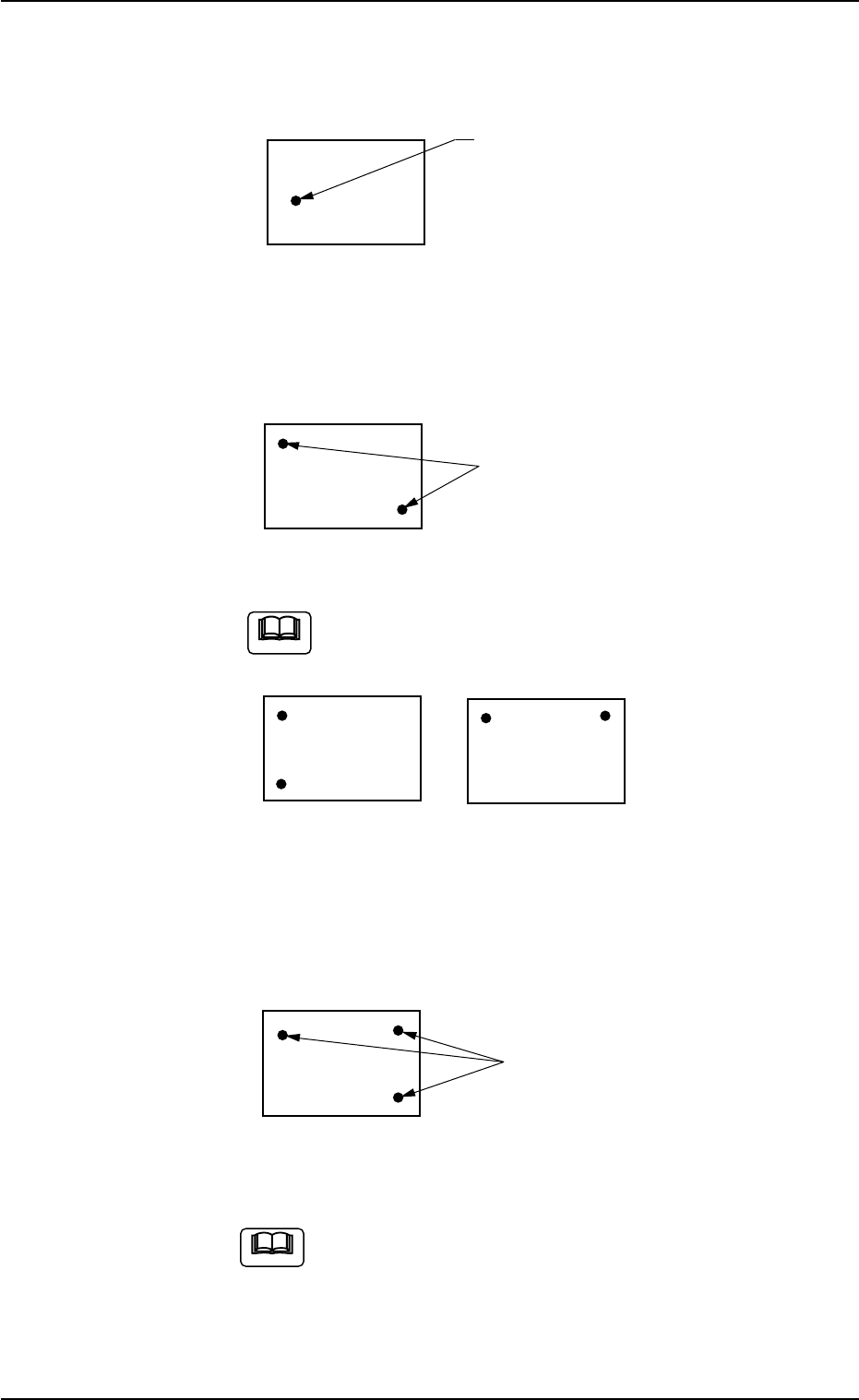
1-Point Recognition1-Point Recognition
1-Point Recognition1-Point Recognition
1-Point Recognition
((
((
(
))
))
)
XY
θ
Fig.3B43Fig.3B43
Fig.3B43Fig.3B43
Fig.3B43
2-Point Recognition2-Point Recognition
2-Point Recognition2-Point Recognition
2-Point Recognition
((
((
(
))
))
)
Fig.3B44Fig.3B44
Fig.3B44Fig.3B44
Fig.3B44
Fig.3B45Fig.3B45
Fig.3B45Fig.3B45
Fig.3B45
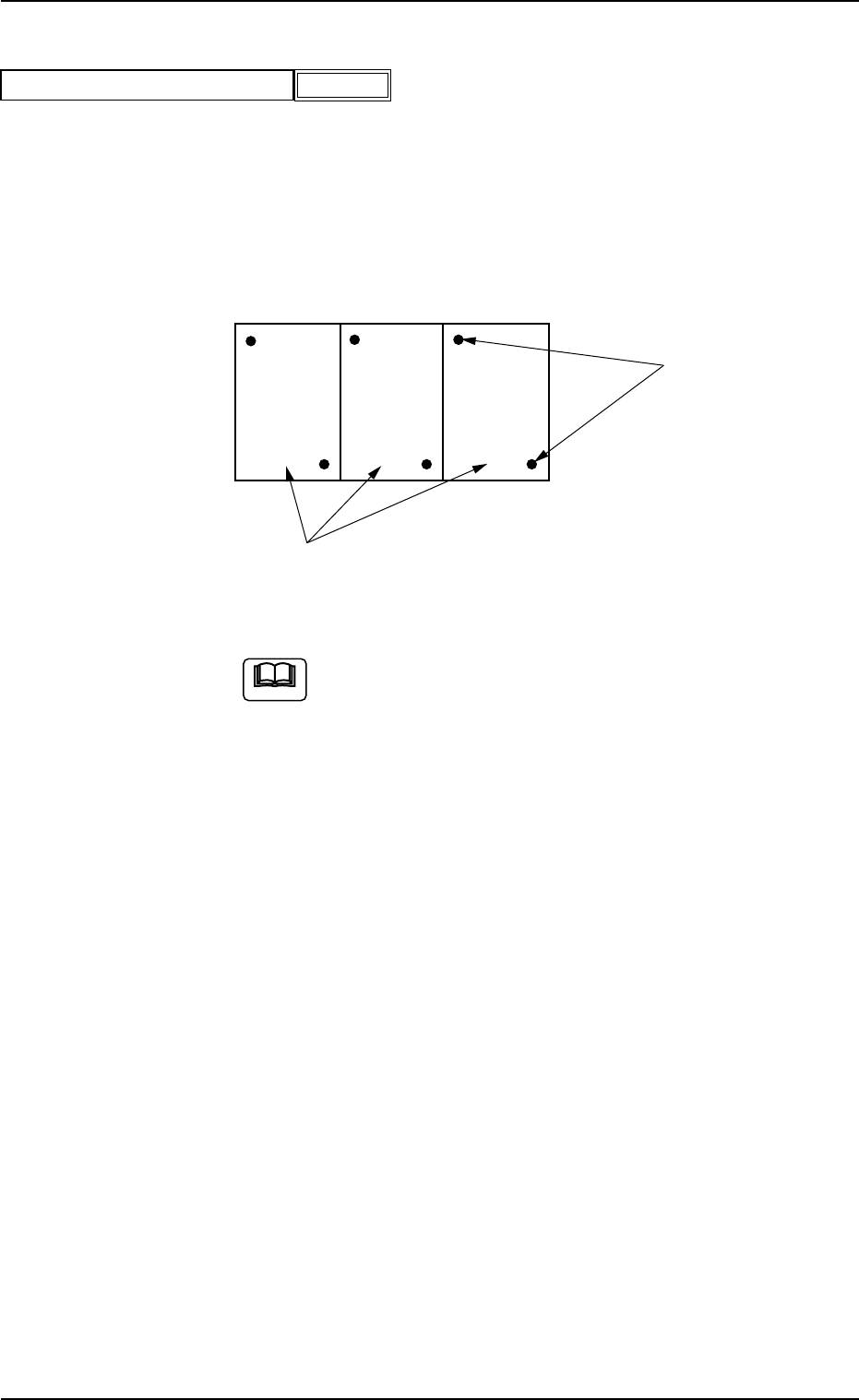
3-Point Recognition3-Point Recognition
3-Point Recognition3-Point Recognition
3-Point Recognition
((
((
(
))
))
)
Fig.3B46Fig.3B46
Fig.3B46Fig.3B46
Fig.3B46
0107-001 2
-
26
Note
Note
2.32.3
2.32.3
2.3
Operation Data(Operation Data(
Operation Data(Operation Data(
Operation Data(
))
))
)
P.E.C. recognition mode image(P.E.C. recognition mode image(
P.E.C. recognition mode image(P.E.C. recognition mode image(
P.E.C. recognition mode image(
ාᵔ䆛ࠀᮎ⊪ාᵔ䆛ࠀᮎ⊪
ාᵔ䆛ࠀᮎ⊪ාᵔ䆛ࠀᮎ⊪
ාᵔ䆛ࠀᮎ⊪
㒙ঢ়䆛ࠀ㒙ঢ়䆛ࠀ
㒙ঢ়䆛ࠀ㒙ঢ়䆛ࠀ
㒙ঢ়䆛ࠀ
))
))
)
䆓ᅯ “P.E.C.recognition function(ාᵔ䆛ࠀࡴ㛒䗞ᢾ)” Џ
“Erable(䆛ࠀ) ” ᯋͼңҺϠ䗞ᢾ㒙ঢ়䆛ࠀⱙ䆓ᅯȢ
DisableDisable
DisableDisable
Disable
::
::
: Ϣ䖰㸡㒙ঢ়ාᵔ䆛ࠀȢ
EnableEnable
EnableEnable
Enable
::
::
: 䖰㸡㒙ঢ়ාᵔ䆛ࠀȢ
U-NU-N
U-NU-N
U-N
::
::
: 䖰㸡㒙ঢ়ාᵔ䆛ࠀȢ
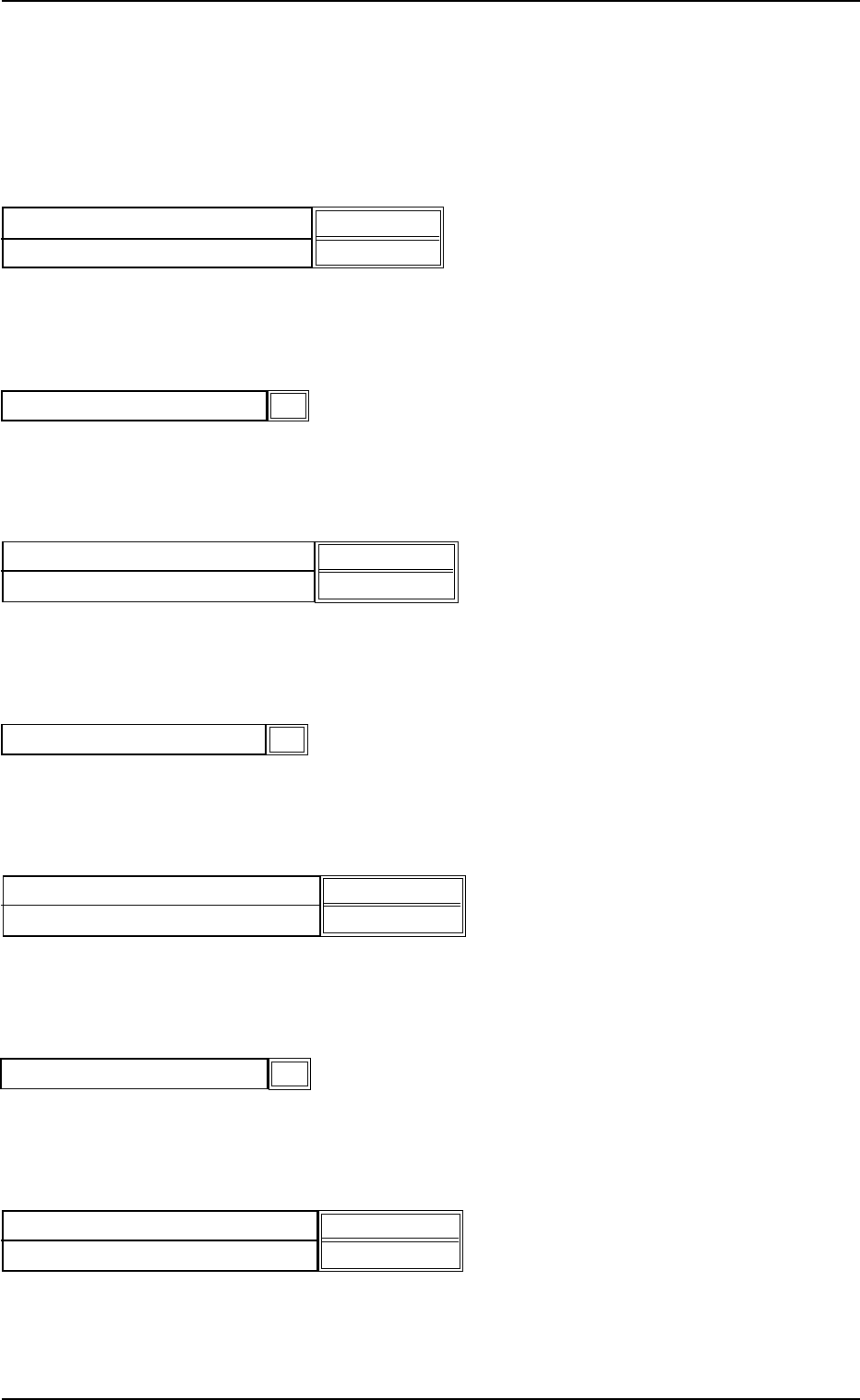
Fig.3B48Fig.3B48
Fig.3B48Fig.3B48
Fig.3B48
ৡᯋՔ⫽ᭉԨ䆛ࠀ㒙ঢ়䆛ࠀᯋͼᅞ㺚ഥᷜⱙ㸺ℸՔ⫽㒙
ঢ়䆛ࠀⱙ㒨ᵱȢ
0107-001 2-27
䆛ࠀ䆛ࠀ
䆛ࠀ䆛ࠀ
䆛ࠀ
ᷜ䆅ᷜ䆅
ᷜ䆅ᷜ䆅
ᷜ䆅
㒙ঢ়ාᵔ㒙ঢ়ාᵔ
㒙ঢ়ාᵔ㒙ঢ়ාᵔ
㒙ঢ়ාᵔ
((
((
(
पԢාपԢා
पԢාपԢා
पԢා
ᵔᵔ
ᵔᵔ
ᵔ
))
))
)
Note
Enable
P.E.C. recognition mode image
Fig.3B47Fig.3B47
Fig.3B47Fig.3B47
Fig.3B47
2.32.3
2.32.3
2.3
Operation Data(Operation Data(
Operation Data(Operation Data(
Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
)
(A02_02)P.E.C. recognition mode global((A02_02)P.E.C. recognition mode global(
(A02_02)P.E.C. recognition mode global((A02_02)P.E.C. recognition mode global(
(A02_02)P.E.C. recognition mode global(
ᭉԨ䆛ࠀᭉԨ䆛ࠀ
ᭉԨ䆛ࠀᭉԨ䆛ࠀ
ᭉԨ䆛ࠀ
))
))
)
Ք⫽ාᵔ䆛ࠀࡴ㛒䗞ᢾⱙᭉԨ䆛ࠀᯋͼ䆓ᅯ䆛ࠀᷜ䆅ⱙഥᷜ
ᷜ䆅ৌȢ
Fiducial mark #1 X location[mm],Y location[mm]Fiducial mark #1 X location[mm],Y location[mm]
Fiducial mark #1 X location[mm],Y location[mm]Fiducial mark #1 X location[mm],Y location[mm]
Fiducial mark #1 X location[mm],Y location[mm]
((
((
(
ϕ⚎ϕ⚎
ϕ⚎ϕ⚎
ϕ⚎
X( X(
X( X(
X(
))
))
)
ȡȡ
ȡȡ
ȡ
Y( Y(
Y( Y(
Y(
㒊㒊
㒊㒊
㒊
))))
))))
))
䆓ᅯϕ⚎䆛ࠀᷜ䆅ⱙഥᷜȢ
पԢ: mm
Fiducial mark #1 mark code (Fiducial mark #1 mark code (
Fiducial mark #1 mark code (Fiducial mark #1 mark code (
Fiducial mark #1 mark code (
ϕ⚎ϕ⚎
ϕ⚎ϕ⚎
ϕ⚎
ᷜ䆅ᷜ䆅
ᷜ䆅ᷜ䆅
ᷜ䆅
No.)No.)
No.)No.)
No.)
䆓ᅯϕ⚎ᷜ䆅ৌȢ
Fiducial mark #2 X location[mm],Y location[mm]Fiducial mark #2 X location[mm],Y location[mm]
Fiducial mark #2 X location[mm],Y location[mm]Fiducial mark #2 X location[mm],Y location[mm]
Fiducial mark #2 X location[mm],Y location[mm]
((
((
(
ѡ⚎ѡ⚎
ѡ⚎ѡ⚎
ѡ⚎
X(X(
X(X(
X(
))
))
)
ȡȡ
ȡȡ
ȡ
Y( Y(
Y( Y(
Y(
㒊㒊
㒊㒊
㒊
))))
))))
))
䆓ᅯѡ⚎䆛ࠀᷜ䆅ⱙഥᷜȢ
पԢ : mm
Fiducial mark #2 mark code(Fiducial mark #2 mark code(
Fiducial mark #2 mark code(Fiducial mark #2 mark code(
Fiducial mark #2 mark code(
ѡ⚎ѡ⚎
ѡ⚎ѡ⚎
ѡ⚎
ᷜ䆅ᷜ䆅
ᷜ䆅ᷜ䆅
ᷜ䆅
No.)No.)
No.)No.)
No.)
䆓ᅯѡ⚎ᷜ䆅ৌȢ
Fiducial mark #3 X location[mm],Y location[mm]Fiducial mark #3 X location[mm],Y location[mm]
Fiducial mark #3 X location[mm],Y location[mm]Fiducial mark #3 X location[mm],Y location[mm]
Fiducial mark #3 X location[mm],Y location[mm]
((
((
(
Ϟ⚎Ϟ⚎
Ϟ⚎Ϟ⚎
Ϟ⚎
X( X(
X( X(
X(
))
))
)
ȡȡ
ȡȡ
ȡ
Y( Y(
Y( Y(
Y(
㒊㒊
㒊㒊
㒊
))))
))))
))
䆓ᅯϞ⚎䆛ࠀᷜ䆅ⱙഥᷜȢ
पԢ: mm
Fiducial mark #3 mark code(Fiducial mark #3 mark code(
Fiducial mark #3 mark code(Fiducial mark #3 mark code(
Fiducial mark #3 mark code(
Ϟ⚎Ϟ⚎
Ϟ⚎Ϟ⚎
Ϟ⚎
ᷜ䆅ᷜ䆅
ᷜ䆅ᷜ䆅
ᷜ䆅
No.)No.)
No.)No.)
No.)
䆓ᅯϞ⚎ᷜ䆅ৌȢ
Fiducial mark #4 X location[mm],Y location[mm]Fiducial mark #4 X location[mm],Y location[mm]
Fiducial mark #4 X location[mm],Y location[mm]Fiducial mark #4 X location[mm],Y location[mm]
Fiducial mark #4 X location[mm],Y location[mm]
((
((
(
ರ⚎ರ⚎
ರ⚎ರ⚎
ರ⚎
X( X(
X( X(
X(
))
))
)
ȡȡ
ȡȡ
ȡ
Y( Y(
Y( Y(
Y(
㒊㒊
㒊㒊
㒊
))))
))))
))(ޛໜЂᭅ)
䆓ᅯರ⚎䆛ࠀᷜ䆅ⱙഥᷜȢ
पԢ : mm
0107-001 2-28
10.000 [mm]
10.000 [mm]
Fiducial mark #1 X location[mm]
Fiducial mark #1 Y location[mm]
Fig.3B49Fig.3B49
Fig.3B49Fig.3B49
Fig.3B49
1
Fiducial mark #1 mark code
Fig.3B50Fig.3B50
Fig.3B50Fig.3B50
Fig.3B50
100.000 [mm]
100.000 [mm]
Fiducial mark #2 X location[mm]
Fiducial mark #2 Y location[mm]
Fig.3B51Fig.3B51
Fig.3B51Fig.3B51
Fig.3B51
1
Fiducial mark #2 Mark code
Fig.3B52Fig.3B52
Fig.3B52Fig.3B52
Fig.3B52
0.000 [mm]
0.000 [mm]
Fiducial mark #3 X location[mm]
Fiducial mark #3 Y location[mm]
Fig.3B53Fig.3B53
Fig.3B53Fig.3B53
Fig.3B53
1
Fiducial mark #3 Mark code
Fig.3B54Fig.3B54
Fig.3B54Fig.3B54
Fig.3B54
0.000 [mm]
0.000 [mm]
Fiducial mark #4 X location[mm]
Fiducial mark #4 Y location[mm]
Fig.3B55Fig.3B55
Fig.3B55Fig.3B55
Fig.3B55
2.32.3
2.32.3
2.3
Operation Data(Operation Data(
Operation Data(Operation Data(
Operation Data(
᪢Աᭅ᪢Աᭅ
᪢Աᭅ᪢Աᭅ
᪢Աᭅ
))
))
)