KD-2077_QA表.pdf - 第26页
QA表 NO. 11 (1/2) NO. 11 (2/2) 机 种 确 认 方法 X方向移 动负 荷 30N 将点胶 头 从X 轴 的一端推到另一端 时 的最大移 动负 荷(未 连 接 电动 机)用推免 规测 定。 NO ① ② NO. 担当人 ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ 【4】-11 KD-2077 装置名称 XY装置 确 认 方法及 调 整方法(故障 处 理方法) 功能名称 X方向移 动负 荷 编 制日期 2007/12/20 …
QA表 NO. 10 (1/2) NO. 10 (2/2)
机种
确认方法
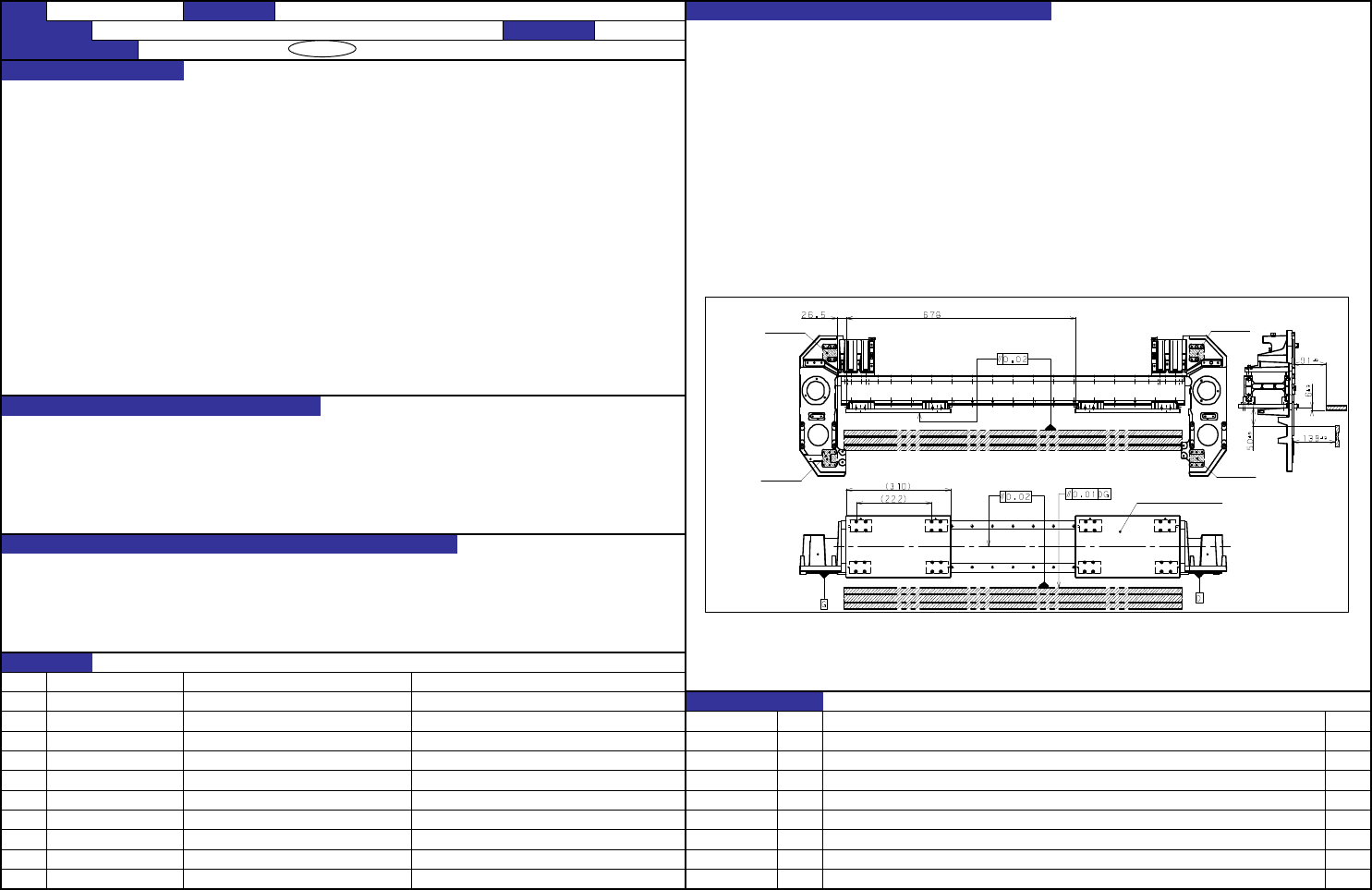
(前后方向)把拨盘标尺安装到夹具用点胶头板的中央,从X架端的止动橡胶粘贴部到
26.5mm的位置到678mm的行程之间,对I型伸缩平行度应在0.02以内。
(高度方向)把各拨盘标尺安装到夹具用点胶头板的左右两端,X架端的止动橡胶粘贴部
·X轴机架直角度 26.5mm的位置到678mm的行程之间,对I型伸缩2处的平行度应在0.02以内。
Y轴基准 :30μm以下 调整方法
(前后方向)因为没有调整机构,所以检查X轴架、LM导向器X、后轨道的部件精度。
(高度方向)拧松固定X框架端L,R和X轴的螺丝各4颗,调整X轴整体的倾斜度。
那样还没有消除的情况下,检查LM导轨X的安装是否笔直。
前后方向的真直影响Y方向的点胶精度。
高度方向的真直影响X方向的点胶精度。
1.点胶精度恶化
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【4】-10
但是,紧贴拨盘的位置是以紧贴点胶头板左边的制动器的位置为0,167~667的500mm宽度的区间。把拨盘安装在
点胶头板的拨盘固定用龙头(OCC位置)的正下方。(左流程和右流程,基板右端的最右端的位置667,从这个位置开
始以尺的常用范围500mm进行直角移动。)
预想故障(应规格调整值不良而发生的故障)
功能名称
X轴机架直角度 编制日期
2007/12/20
KD-2077 装置名称 XY装置
确认方法及调整方法(故障处理方法)
质量保证类别
功能・安全性 / 可靠性 / 安全性 / 商品特点
质量特性(规格调整值)
功能作用(规格调整值的意义)
对象元件
变更履历
货号
品名
有关质量特性
内容
'07.12.20
新设
日期
念朔圭㏍
念業圭㏍
(佩殻海業)
I中(戦迦)
H中(戦迦)
(Y已LM擬㏍匂芦廾中 H.I中)
(Y已LM擬㏍匂芦廾中 E.F中)
F中(戦迦)
E中(戦迦)
斜醤喘薮廾遊医
前后方向
I面(里侧)
H面(里侧)
F面(里侧)
E面(里侧)
高度方向
夹具用贴装头板
(Y轴L M导向器安装
面
(Y轴L M导向器安装
面
行程长度
QA表 NO. 11 (1/2) NO. 11 (2/2)
机种
确认方法
X方向移动负荷 30N 将点胶头从X轴的一端推到另一端时的最大移动负荷(未连接电动机)用推免规测定。
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【4】-11
KD-2077 装置名称 XY装置
确认方法及调整方法(故障处理方法)
功能名称
X方向移动负荷 编制日期
2007/12/20
质量保证类别
功能・安全性 / 可靠性 / 安全性 / 商品特点
功能作用(规格调整值的意义)
预想故障(应规格调整值不良而发生的故障)
货号
品名
有关质量特性
对象元件
变更履历
内容
'07.12.20
新设
日期
QA表 NO. 12 (1/2) NO. 12 (2/2)
机种
确认方法
Y方向移动负荷 35N(单侧) 将X轴从Y轴的一端推到另一端时的最大移动负荷(未连接电动机)用推免规测定。
最初只安装左侧球螺丝进行测定,再安装右侧的后测定全体的值,从全体值中减去左侧的负荷算出右侧的负荷。
NO
①
②
NO. 担当人
③
④
⑤
⑥
⑦
⑧
⑨
⑩
【4】-12
内容
变更履历
日期
对象元件
货号
品名
有关质量特性
质量保证类别
功能・安全性 / 可靠性 / 安全性 / 商品特点
功能作用(规格调整值的意义)
预想故障(应规格调整值不良而发生的故障)
功能名称
Y方向移动负荷 编制日期
2007/12/20
KD-2077 装置名称 XY装置
确认方法及调整方法(故障处理方法)
新设
'07.12.20