0197786-01_BA_HeadVerification_708_DE.pdf - 第44页
SIPLACE „Head Ver ification“ Bedienungsanleitun g Ausgabe 01/2015 44 5. Jetzt startet die eigent liche Erm ittlung der Messwerte. 6. Abholen: Segment 1 wird nun m it dem Verfahrprofil TP34 [TP34 010 05 CRAW L] und einem …
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
43
4.6.4 Deutung der Ergebnisse
Fehler bei Vacuum open / Vacuum delta / Vacuum delta an allen Segmenten:
1. Defekte Vakuumpumpe
2. Dichtscheibe (Viel-Loch-Gummischeibe) für Haltekreis nicht korrekt montiert oder beschädigt
Überprüfung der Dichtscheibenposition oder Austausch
3. Haltekreis verschmutzt Reinigen im Ultraschallbad
Fehler bei Vacuum open / Vacuum delta / Vacuum delta an einzelnen Segmenten:
1. Überprüfung der Filterscheiben zur Abdichtung Pipettensitz Tausch Filterscheiben
2. Überprüfung der Pipette Austausch der Pipette
3. Verschmutzter oder beschädigter Vakuumschlauch zum Segment Tausch Vakuumschlauch
4. Haltekreis verschmutzt Reinigen im Ultraschallbad
Fehler bei Delta vac. 0-270° an einzelnen Segmenten:
1. DP/Segment defekt Rotation bzw. Unplanarität der Pipettenaufsetzfläche Tausch
DP/Segment
2. DP/Segment-interner Vakuumkreislauf defekt Tausch DP/Segment
4.7 Messung „Head endurance run 01005“
Für diese Messungen werden folgende Teile benötigt:
CPP: 12x Nozzletype 2057 03070280-01 (Kalibrierpipette)
CP20A: 20x Nozzletype 1235 03015222-01 (Kalibrierpipette)
4.7.1 Erklärung der Messung – Ablauf
Mit dieser Messung wird die Z-Istpositionsabweichung beim Abholen und Bestücken ermittelt. Diese
Z-Istpositionsabweichung ist ein Indiz dafür, wie zuverlässig das Z-Achsensystem arbeitet und ob es
beschädigt ist.
Diese Messung ist vor allem für die kontaktlosen Bestückungen wichtig, wie sie z.B. bei 0201- bzw.
01005-Bauteilen verwendet wird.
Ebenso wird die Positioniergeschwindigkeit der DP bzw. der Segmente überprüft und deren
Zuverlässigkeit überprüft.
Mithilfe der Ergebnisse dieser Messungen können letztendlich auf folgende Ursachen Rückschlüsse
gezogen werden:
1. Schwergängige oder ausgeschlagene Segmentführungen
2. Linearführung der Z-Achse schwergängig
3. Defekter Z-Motor
4. DP-Antrieb oder Drehstation des Segments defekt
Ablauf der Messung im Detail:
1. Der Kopf wird über der Höhenreferenzlaufposition auf der festen Transportwange positioniert.
2. Segment 1 fährt mit dem Verfahrprofil TP34 [TP34 01005 CRAWL] mit sehr langsamer
Geschwindigkeit auf die Transportwange. Sobald die Pipettenspitze die Transportwange
berührt, steigt die Stromüberwachung der Z-Achse an und die Z-Achse hat die
Referenzposition zur Errechnung der kontaktlosen Z-Abholposition erreicht. Von dieser
Position wird nun ein Abstand eingerechnet, der für die kontaktlose Bauteilabholung benötigt
wird. Diese Position ist nun die Zielposition für die kommenden Abhol- bzw. Bestückzyklen.
3. Nun fährt die Z-Achse mit Verfahrprofil TP1 wieder nach oben.
4. Nun ermittelt die Z-Achse für alle weiteren Segmente die Z-Abholposition kontaktlos wie in
Punkt (2)
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
44
5. Jetzt startet die eigentliche Ermittlung der Messwerte.
6. Abholen:
Segment 1 wird nun mit dem Verfahrprofil TP34 [TP34 01005 CRAWL] und einem Abholwinkel
der DP von 0° nach unten auf die ermittelte Z-Abholposition kontaktlos positioniert. Die dabei
ermittelte tatsächliche Z-Position bei der Endemeldung ergibt die Position Z-Pick [µm].
Ebenfalls wird die Positionierzeit der Drehung der DP von 180° (Bestücken) nach 0° (Abholen)
ermittelt.
7. Segment 1 wird mit dem Verfahrprofil TP1 wieder nach oben gefahren.
8. Bestücken:
Segment 1 wird nun mit dem Verfahrprofil TP34 [TP34 01005 CRAWL] und einem
Bestückwinkel der DP von 180° nach unten auf die ermittelte Z-Abholposition kontaktlos
positioniert. Die dabei ermittelte tatsächliche Z-Position bei der Endemeldung ergibt die
Position Z-Place [µm].
Ebenfalls wird die Positionierzeit der Drehung der DP von 0° (Abholen) nach 180° (Bestücken)
ermittelt.
9. Segment 1 wird mit dem Verfahrprofil TP1 wieder nach oben gefahren.
10. Dieser Ablauf wird für Segment 1 nun 30x durchlaufen, was insgesamt 60x Bewegungen (30x
Abholen / 30x Bestücken) der Z-Achse entspricht und auch insgesamt 60x Positionierzeiten für
die DP ergibt.
11. Alle Abholpositionen Z-Pick [µm] werden intern gespeichert und es werden die minimalen (Z
min pick [µm]) und maximalen (Z max pick [µm]) Position zur Auswertung benutzt.
12. Alle Bestückpositionen Z-Place [µm] werden intern gespeichert und es werden die minimalen
(Z min place [µm]) und maximalen (Z max place [µm]) Position zur Auswertung benutzt.
13. Ebenso werden die Positionierzeiten der Drehungen eines jeden Segments um 180°
ausgewertet und ergeben dann eine minimale (Min DP Time [ms]) und maximale (Max DP
Time [ms]) für jedes Segment.
14. Jetzt dreht der Stern das Segment 2 in die Bestückposition
15. Die Sequenzen 6.-14. werden nun für alle weiteren Segmente durchlaufen.
4.7.2 Erklärung des Messergebnisses im Menü Progress
Nach Beendigung der Messung erscheint im Menü Progress folgendes Ergebnis:
Abbildung 28: Ergebnis Head endurance run 01005_1
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
45
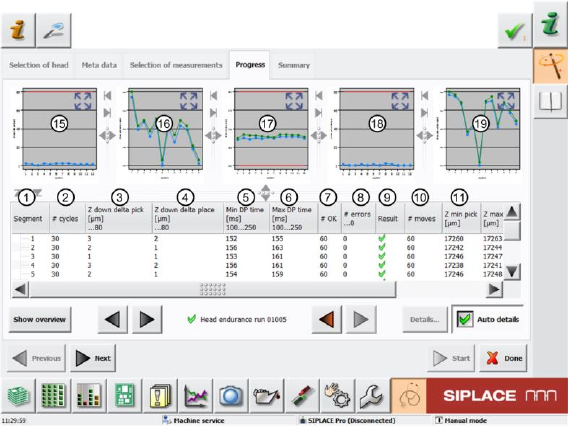
Abbildung 29: Ergebnis Head endurance run 01005_2
Legende:
1. Gemessenes Segment
2. Anzahl der Gesamtanzahl der Zyklen
3. Ermittelter Wert Z down delta pick [µm]
Dieser Wert ergibt sich aus der Differenz aus dem kleinsten (Z min pick [µm] (11)) und dem
größten (Z max pick [µm] (12)) Positionswert der Z-Achsenpositionierung bei den Abholzyklen.
Dieser Wert muss innerhalb einer plausiblen Toleranz (in unserem Beispiel von 0..80µm)
liegen!
Z down delta pick [µm] = Z max pick [µm] - Z min pick [µm]
4. Ermittelter Wert Z down delta place [µm]
Dieser Wert ergibt sich aus der Differenz aus dem kleinsten (Z min place [µm] (13)) und dem
größten (Z max place [µm] (14)) Positionswert der Z-Achsenpositionierung bei den
Abholzyklen.
Dieser Wert muss innerhalb einer plausiblen Toleranz (in unserem Beispiel von 0..80µm)
liegen!
Z down delta place [µm] = Z max place [µm] - Z min place [µm]
5. Der Wert Min DP time [ms] ist die kürzeste erreichte Positionierzeit der DP beim Positionieren
um 180°. Dieser Wert muss innerhalb einer plausiblen Toleranz (in unserem Beispiel von
100..250ms) liegen!
6. Der Wert Max DP time [ms] ist die längste benötigte Positionierzeit der DP beim Positionieren
um 180°. Dieser Wert muss innerhalb einer plausiblen Toleranz (in unserem Beispiel von
100..250ms) liegen!
7. Ergebnis-Anzeige, wie viele Hübe erfolgreich waren
8. Anzahl der Fehler während der 30x Gesamtzyklen.
9. Ergebnis-Anzeige (OK grüner Hacken / NOK rotes X)
10. Anzahl der Einzelbewegungen der Z-Achse (in unserem Fall 30x abwärts + 30x aufwärts = 60)
11. Z min pick [µm] ist der kleinste erreichte Positionswert der Z-Achsenpositionierung bei den
Abholzyklen. Dieser Wert wird für die Berechnung von Z down delta pick [µm] (3) verwendet.
12. Z max pick [µm] ist der größte erreichte Positionswert der Z-Achsenpositionierung bei den
Abholzyklen. Dieser Wert wird für die Berechnung von Z down delta pick [µm] (3) verwendet.
13. Z min place [µm] ist der kleinste erreichte Positionswert der Z-Achsenpositionierung bei den
Bestückzyklen. Dieser Wert wird für die Berechnung von Z down delta place [µm] (4)
verwendet.
14. Z max place [µm] ist der größte erreichte Positionswert der Z-Achsenpositionierung bei den
Bestückzyklen. Dieser Wert wird für die Berechnung von Z down delta place [µm] (4)
verwendet.