0197786-01_BA_HeadVerification_708_DE.pdf - 第75页
SIPLACE „Head Ver ification“ Bedienungsanleitun g Ausgabe 01/2015 75 4.14.2 Erklärung des Messergebnisses im Menü Progress Nach Beendigung der Messung ersc heint im Menü Progress folgendes Ergeb nis: Abbildung 52 : Ergeb…
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
74
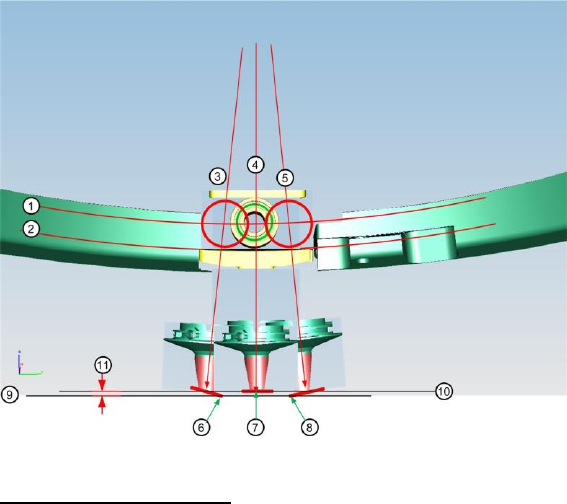
Abbildung 51: Funktionsbeschreibung Component sensor calibration
Legende zur Zeichnung:
1. Mittellinie der Mitnehmerlager im Rachen (leichter Radius)
2. Rachenfläche Unten (leichter Radius zum Übergang zum Laufring)
3. Mittelachse des Mitnehmerlagers am Rachenanschlag links
4. Mittelachse des Mitnehmerlagers in der Rachenmitte
5. Mittelachse des Mitnehmerlagers am Rachenanschlag rechts
6. Ecke der Pipettenfläche, die bei Stellung Rachenanschlag links den BE-Sensor unterbricht (9)
7. Pipettenspitze, die bei Stellung Rachenmitte den BE-Sensor unterbricht (10). Dies ist auch die
Höhe 0, welche während des Referenzlaufes ermittelt wird und dient als Bezugspunkt zur
Ermittlung des Werts Calibration value
8. Ecke der Pipettenfläche, die bei Stellung Rachenanschlag links den BE-Sensor unterbricht (9)
9. Das ist die sinnbildliche Darstellung des BE-Sensorstrahls, wenn am Rachenanschlag links
oder rechts der BE-Sensor unterbrochen wird. In Realität ist der BE-Sensorstrahl immer auf
Höhe 10, die Z-Achse muss daher eher nach Oben (ins Negative) gezogen werden, damit die
Ecke der Pipettenfläche den BE-Sensor noch nicht unterbricht!
10. BE-Sensorstrahl
11. Wert Calibration value
Dies ist die Änderung der Z-Höhe, wenn beim Drehen des Sterns die Pipettenfläche über die
Diagonale kippt und somit der BE-Sensor „früher“ aktiviert wird.
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
75
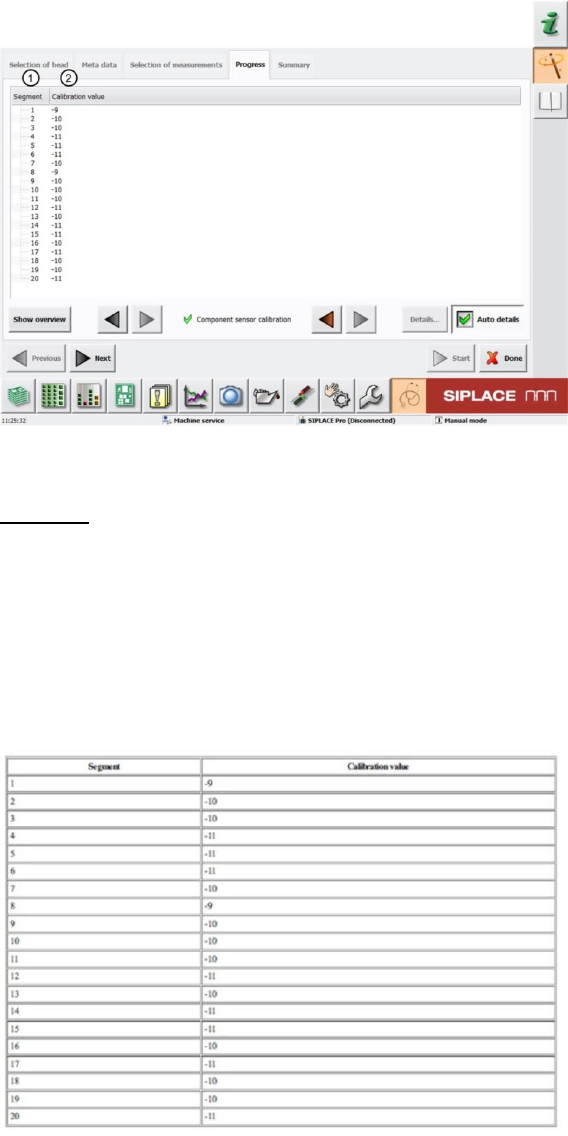
4.14.2 Erklärung des Messergebnisses im Menü Progress
Nach Beendigung der Messung erscheint im Menü Progress folgendes Ergebnis:
Abbildung 52: Ergebnis Component sensor calibration
Legende:
1. Gemessenes Segment
2. Der Wert Calibration value ergibt sich aus der Verfahrwegänderung der Z-Achse während der
Achs-Überlappung (Sternachse – Z-Achse) und dem Betätigen des BE-Sensors.
4.14.3 Erklärung des Messergebnisses anhand der Ergebnis-PDF
Diese Ergebnisse kann man sehen, wenn man im Summary-Menü nach unten scrollt, oder eine
Ergebnis-PDF erzeugt!
Abbildung 53: Ergebnis-PDF Component sensor calibration
Siehe 6.14.2

SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
76
4.14.4 Deutung der Ergebnisse
Fehler bei Calibration value an allen Segmenten:
1. BE-Sensor schief montiert Neujustage des BE-Sensors
2. Optik des BE-Sensors defekt Austausch BE-Sensor
3. Optik des BE-Sensor verschmutzt Reinigen mit Isopropylalkohol
4.15 Messung „Segment offset up & down“
Für diese Messungen werden folgende Teile benötigt:
CPP: 12x Nozzletype 2057 03070280-01 (Kalibrierpipette)
CPP: 1x Kalibrierteil 03010565-01
CP20P: 20x Nozzletype 4235 03098748-01 (Kalibrierpipette)
CP20A: 20x Nozzletype 1235 03015222-01 (Kalibrierpipette)
C&P20A/P: 1x Kalibrierteil 03034148-01
4.15.1 Erklärung der Messung – Ablauf
Mit der Messung „Segment offset up & down“ wird überprüft, inwiefern sich ein Segment außerhalb
seiner Rotationsachse befindet. Diese Aussermittigkeit wird als Segmentoffset bezeichnet. Es gibt
einen Segment offset up, welcher die Rotation (Offset) des Segmentes im eingefahrenen Zustandes,
also mit Z-Achse oben beschreibt. Der Segment offset unten beschreibt dann die Rotation des
Segmentes in der unteren Position. Diese Position beschreibt die Aussermittigkeit der Segmentachse
in der Abhol- bzw. Bestückposition, somit den Offset zwischen Bauelemente- und Leiterplattenkamera.
Diese Vermessung ist wichtig, damit die Maschine beim Abholen bzw. Bestücken diesen Versatz in
die Sollpositionen miteinrechnen kann und somit erhöht sich die Abhol- bzw. Bestückgenauigkeit. Die
Messung „Segment offset up & down “ wird für jedes Segment in der oberen bzw. unteren Position in
vier Winkel (0°, 90°, 180° und 270°) durchgeführt, damit die exakte Rotation ermittelt wird und auch
der Einfluss der Z-Linearführung zwischen Segment oben und Segment unten mit einkalkuliert werden
kann.
Mithilfe der Ergebnisse dieser Messungen können letztendlich auf folgende Ursachen Rückschlüsse
gezogen werden:
1. Verbogene Segmente
2. Defekte Z-Linearführungen der DP / Segmente
Ablauf der Messung im Detail:
1. Zuerst wird die Position des Kalibrierteils in der Kalibrierteilablage als Istposition mit der
Leiterplattenkamera ermittelt, die exakte Lage des Kalibrierteils in der Kalibrierteiltasche ist
somit bestimmt und man kennt somit die genaue Mitte und Lage des Kalibrierteils, die als
Abholposition nun übernommen wird. Diese Mitte wird anhand der 4 Punkte in den Ecken des
Kalibrierteiles ermittelt.
2. Segment 1 wird mit einem Winkel von 0° nach unten gefahren und holt das Kalibrierteil an der
vorher ermittelten Abholposition (Kalibrierteilmitte) ab.
3. Segment 1 wird nach oben gefahren.
4. Segment 1 wird durch den Stern über die Bauelementekamera gedreht.
5. Die Bauelementekamera ermittelt durch Vermessen der vier Kalibrierteilstrukturmarken exakt
die Position des Kalibrierteils zur Kameramitte, das Kalibrierteil wird somit optisch zentriert.
Die hier ermittelten Offsetwerte werden mit Up X [µm] und Up Y [µm] gespeichert. Dieser
Wert beschreibt nun die Aussermittigkeit des Kalibrierteiles zur Kameramitte. Dieser Wert
ergibt nun den Segment Offset Up für das Segment 1 bei 0°, da man davon ausgeht, dass das
Segment 1 exakt das Kalibrierteil in der Mitte abgeholt hat.
Die ermittelten Offsetwerte werden als Korrekturwerte in die folgende Bestückung (Ablegen)
des Kalibrierteils (Kalibrierteilablage) eingerechnet.
6. Der Stern dreht das Segment mit dem Kalibrierteil wieder zurück in die Bestückposition.