0197786-01_BA_HeadVerification_708_DE.pdf - 第72页
SIPLACE „Head Ver ification“ Bedienungsanleitun g Ausgabe 01/2015 72 4.13.3 Erklärung des Messergebnisses anhand der Ergebnis -PDF Diese Ergebnisse k ann man sehen, wenn man im Summar y-Menü nac h unten scrollt, oder ein…

SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
71
8. Der Wert Radial runout 360° [µm] beschreibt die komplett ermittelte Pipettenlängenänderung
beim Drehen des Segments um 360°. Dabei wird der Wert die Differenz aus der kleinsten
(kürzeste Messung) Pipettenlänge und der größten (längste Messung) Pipettenlänge kalkuliert
angegeben, die sich beim Drehen über die kompletten 360° ergeben haben.. Dieser Wert
muss innerhalb einer plausiblen Toleranz (in unserem Beispiel von 0..100µm) liegen!
9. Ergebnis-Anzeige (OK grüner Hacken / NOK rotes X)
10. Mit dem Wert Variation 5° [µm] wird der größte Anstieg des Spannungswertes der
Lichtschranke Z-Unten beim Drehen des Segments um 360° in einem 5°-Bereich ermittelt.
11. Mit dem Wert Variation 360° [µm] wird die Spannungswert-Differenz der Lichtschranke Z-
Unten beim Drehen des Segments um 360° ermittelt. Die Differenz errechnet sich aus dem
größten ermittelten analogen Spannungswert Max value [mV] der Lichtschranke Z-Unten und
dem kleinsten ermittelten analogen Spannungswert Min value [mV] während einer
kompletten Drehung des DP um 360°.
12. In diesem Diagramm werden die Werte für Sensor value [mV] (2) / Min value [mV] (3) / Max
value [mV] (3) der Segmente dargestellt.
Blaue Linie Sensor value [mV]
Hellgrüne Linie Min value [mV]
Dunkelgrüne Linie Max value [mV]
Rote Grenzlinien Toleranzen Min und Max (in unserem Fall 2000…5000mV)
Mit dem Button kann das Diagramm vergrößert werden.
13. In diesem Diagramm werden die Werte für Radial runout 5° [µm] (7) / Radial runout 360°
[µm] (8) der Segmente dargestellt.
Blaue Linie Radial runout 360° [µm]
Grüne Linie Radial runout 5° [µm]
Blaue Grenzlinie Toleranzen für Radial runout 360° Min und Max (in unserem Fall
0…100µm)
Grüne Grenzlinie Toleranzen für Radial runout 5° Min und Max (in unserem Fall 0..20µm)
Mit dem Button kann das Diagramm vergrößert werden.
14. In diesem Diagramm wird der Wert Spring response low [V/m] (5) angegeben.
Blaue Linie Spring response low [V/m]
Rote Grenzlinien Toleranzen für Spring response low [V/m] (in unserem Fall -2000..-
5300V/m)
Mit dem Button kann das Diagramm vergrößert werden.
15. Mit diesem Diagramm wird der Wert LED gain abgebildet
Blaue Linie LED gain
Rote Grenzlinien Toleranzen für LED gain (in unserem Fall 90..200)
16. Mit diesem Diagramm werden die Werte Sensor Value [mV] für jedes Segment bei der
Drehung über 360° als Kurve dargestellt.
Blaue Linien Jedes Segment hat eine eigene Kurve, die den Verlauf des analogen
Spannungswert der Lichtschranke Z-Unten bei einer Drehung über 360° darstellt. Der analoge
Spannungswert ist ein Indiz für den Abstand des Schaltrings zur Lichtschranke bei jeder
Position während der Drehung. Aufgrund der Hell-Dunkel-Erkennung können so
Verunreinigungen durch Staub auf der schwarzen Schaltringoberfläche erkannt werden.
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
72
4.13.3 Erklärung des Messergebnisses anhand der Ergebnis-PDF
Diese Ergebnisse kann man sehen, wenn man im Summary-Menü nach unten scrollt, oder eine
Ergebnis-PDF erzeugt!
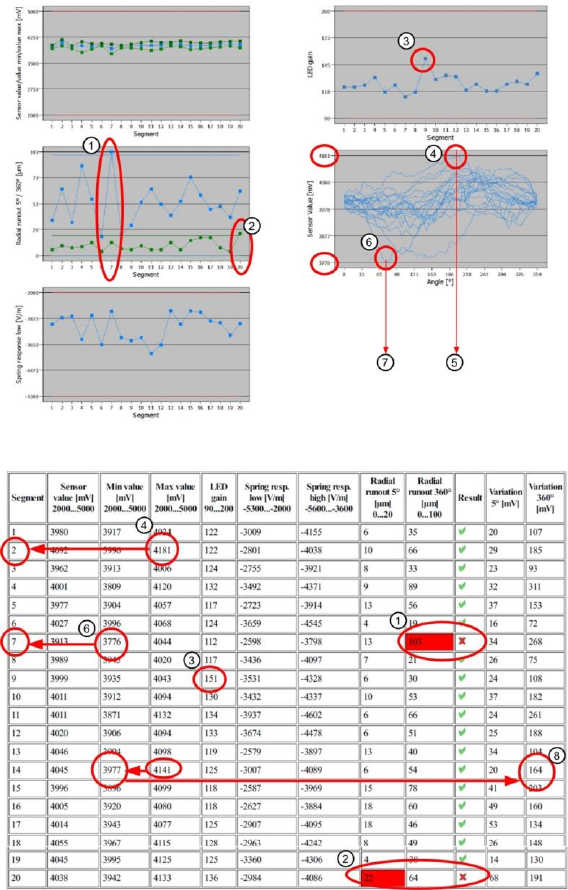
Abbildung 49: Ergebnis-PDF ZDS sensor values_1
Abbildung 50: Ergebnis-PDF ZDS sensor values_2
Am Segment 7 kann man sehen, dass der Wert für Radial runout 360° mit 103µm (1) deutlich über
dem zulässigen Grenzwert ist. Das bedeutet, dass die Pipettenlänge während einer kompletten 360°-
Drehung des Segments aufgrund einer Rotation taumelt und so nicht exakt auf dem Pipettensitz liegt.
Zudem kann man das Ergebnis mit der Messung des Sensor value [mV] für Segment 7 (6) in
Verbindung bringen. Der kleinste Min Value [mV] der gesamten Messung, der den größten Abstand
zwischen Lichtschranke Z-Unten und dem Schaltring (hellste Messung) wiederspiegelt, ist in etwa bei
einem Drehwinkel ca. 75° (7) am Segment 7. Somit kann man daraus schließen, dass hier eventuell
eine Verunreinigung durch Staub (weiße Partikel, deswegen hier eine Hellmessung) vorliegt.
Der größte gemessene Max value [mV] ist am Segment 2 (4) zu finden. Aus dem Diagramm ist
ersichtlich, dass dieser Wert am Segment 2 in etwa bei einem Winkel von ca. 210° (5) erreicht wurde.
Hier ist somit der kleinste Abstand der Lichtschranke Z-Unten zum Schaltring gemessen worden. In
diesem Bereich könnte es sich aufgrund einer Dunkelmessung um eine Beschädigung des
Schaltringes handeln.
Hell-Dunkel-Messungen (Schwankungen im analogen Spannungswert der Lichtschranke Z-Unten)
können sich aber auch durch ein Taumeln (unsauber montierter Schaltring) des Schaltrings ergeben.

SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
73
Am Segment 20 (2) ist bei der Messung Radial runout 5° ein Pipettenlängenanstieg innerhalb von 5°
gemessen worden, der nicht zulässig ist. Eventuell handelt es sich hier um eine verschmutzte Pipette.
Der größte erreichte Wert für den LED gain wurde am Segment 9 (3) erreicht. Eine solche
Abweichung kann auf einen baldigen Ausfall der Lichtschranke Z-Unten hindeuten.
Der Wert Variation 360 [mV] (8) errechnet sich aus der Differenz zwischen Max value [mV] und Min
value [mV]. In unserem Fall 4141mV – 3977mV = 164mV
4.13.4 Deutung der Ergebnisse
Derzeit liegen keine Erfahrungswerte vor!
4.14 Messung „Component sensor calibration“
Für diese Messungen werden folgende Teile benötigt:
CP20P: 20x Nozzletype 4235 03098748-01 (Kalibrierpipette)
4.14.1 Erklärung der Messung – Ablauf
Mit der Messung „Component sensor calibration“ wird überprüft, wie weit sich die Z-Höhe der Pipette
verändert, wenn die Z-Achse im Modus Achsen-Überlappung während der Sterndrehung nach unten
positioniert wird und den BE-Sensor aktiviert. Es wird überprüft, wann der Schaltpunkt des BE-
Sensors ist, wenn die Stirnfläche der Pipettenspitze außermittig beim Achs-Überlappen den BE-
Sensor aktiviert. Die Ecke einer Stirnfläche der Pipette wandert bei einer Drehung um den Sternpunkt
im Bereich von kleinen Winkeln (wie es bei der Bewegung Rachenanschlag links nach
Rachenanschlag rechts der Fall ist) eher nach unten. Man kann es auch als diagonalen Kippeffekt
beschreiben! Diese Z-Achsenveränderung wird mit dieser Messung am BE-Sensor gemessen.
Mithilfe der Ergebnisse dieser Messungen können letztendlich auf folgende Ursachen Rückschlüsse
gezogen werden:
1. Schiefe BE-Sensor-Montage
Ablauf der Messung im Detail:
1. Kopfreferenzlauf wird durchgeführt
2. Segment 1 wird mit dem Stern in die Bestückposition gedreht.
3. Das Mitnehmerlager steht nun mittig im Rachen der Z-Achse.
4. Die Z-Achse fährt nach unten, bis der Rachen mittig im Ausschnitt des Laufringes steht und
den BE-Sensor schaltet.
5. Segment 1 wird mit dem Stern langsam in Richtung linker Anschlag am Laufring gedreht.
6. Ist die Position linker Anschlag erreicht, so fängt die Z-Achse an, schrittweise nach unten zu
Takten, bis die Ecke der Pipettenstirnfläche den BE-Sensor aktiviert.
7. Nun wird schrittweise der Stern vom linken zum rechten Rachenanschlag getaktet.
8. Dabei wird immer wieder schrittweise die Z-Achse verfahren, bis der BE-Sensor durch die
Pipettenstirnfläche aktiviert ist.
9. Beim Erreichen der Mitte des Rachens sollte der kleinste Wert, also 0, erreicht werden.
10. Der Abstand von der niedrigsten Z-Achsenstellung (Mitnehmer am Rachen links oder rechts)
bis zur höchsten Z-Achsenstellung (Mitnehmer in Rachen Mitte = 0) bei Unterbrechung des BE-
Sensors ergibt den Wert Calibration value