00197462-03_SM_CPP_Kunde_DE.pdf - 第21页
2 Modul-Übersicht 2.1 CPP-Kopf Serviceanleitung SIPLACE Multistar (CPP / CPP M) 02/2018 21 2.1.8 Single-Core-Solution (SCS) Abb.14: SCS 1. Platine Control-Modul 2. Platine Power-Modul 3. Trägerplatte 4. Stecker (Regelei…
2 Modul-Übersicht
2.1 CPP-Kopf
20 Serviceanleitung SIPLACE Multistar (CPP / CPP M) 02/2018
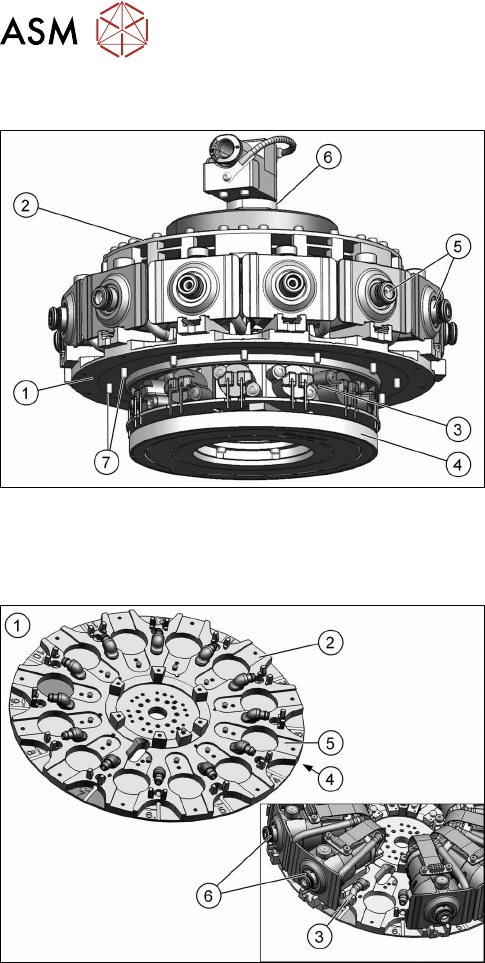
2.1.6 Stern
Abb.12: Stern (ab FS05)
1. Sternträger
2. Single Core Solution (SCS)
3. Ventilinsel
4. Kontaktloser Energie- und Datenübertrager
5. DP-Antriebe
6. Haltekreis in der Mitte des Sterns
7. Befestigung am Rotor des Sternmotors
Der Stern besteht aus dem Sternträger, an dem sich
alle zwölf DP-Antriebe befinden, der Steuerplatine
(SCS), der Ventilinsel, einem Energie- und einem Da-
tenübertrager.
Der Haltekreis befindet sich in der Mitte des Sterns.
Die komplette Einheit ist am Rotor des Sternmotors
befestigt.
2.1.7 Sternträger
Abb.13: Sternträger
1. Sternträger
2. Sternträgerplatte
3. Schlauch zum DP-Antrieb
4. Rückseite des Sternträgers
5. Vorderseite des Sternträgers
6. DP-Antrieb
Die Sternträgerplatte ist direkt am Rotor des Sternmo-
tors befestigt.
Auf der Rückseite des Sternträgers sind die Ventilin-
sel, Energie- und Datenübertrager befestigt.
Auf der Vorderseite befinden sich die zwölf DP-
Antriebe und in der Mitte wird der Haltekreis mit der
Steuerungseinheit SCS montiert.
Die Blasluft (BE Abwerfen) und das Vakuum (BE Ab-
holen) wird über das Druckregelventil, die Schliffschei-
be und die äußeren Ventilinselbohrungen durch die
Sternträgerplatte über einen Schlauch zu den einzel-
nen DP‑Antrieben geführt.
2 Modul-Übersicht
2.1 CPP-Kopf
Serviceanleitung SIPLACE Multistar (CPP / CPP M) 02/2018 21
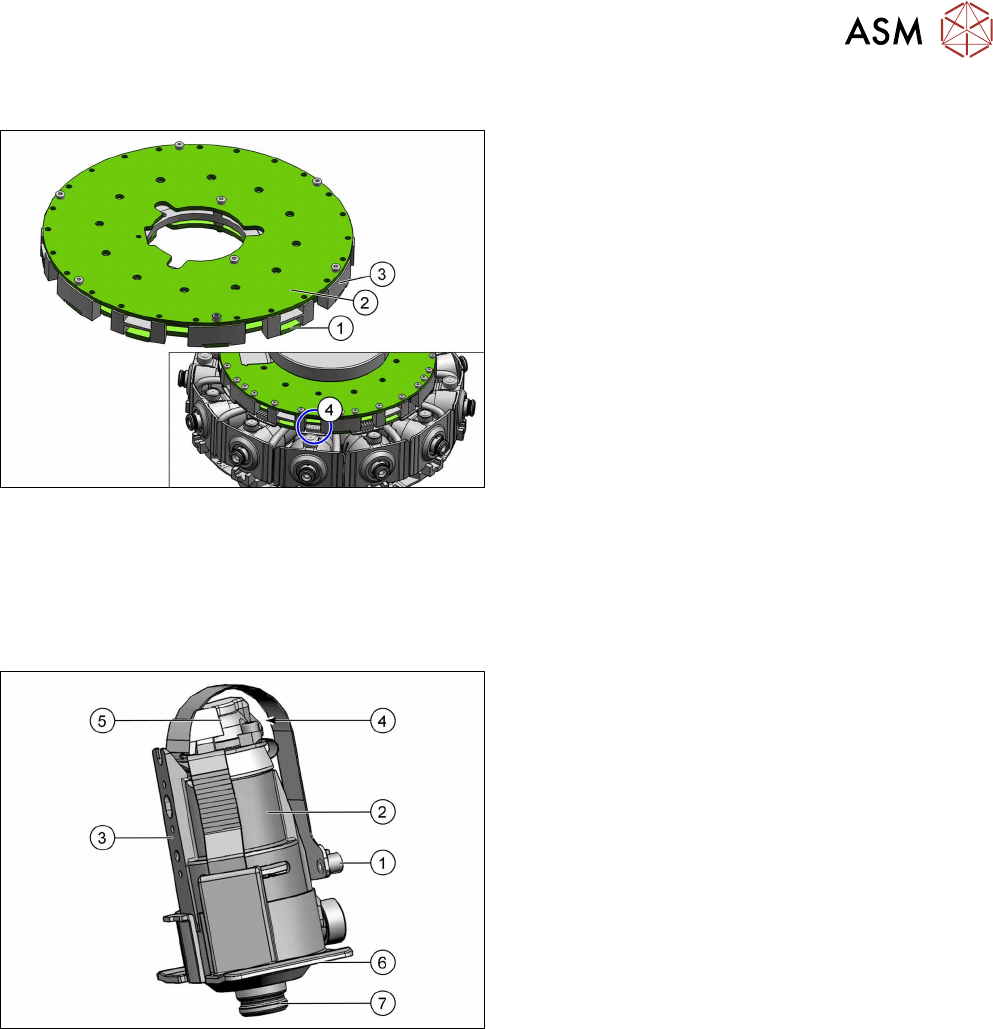
2.1.8 Single-Core-Solution (SCS)
Abb.14: SCS
1. Platine Control-Modul
2. Platine Power-Modul
3. Trägerplatte
4. Stecker (Regeleinheit) für Energie- und Daten-
versorgung der DP‑Antriebe
Die SCS hat im wesentlichen zwei Aufgaben:
1. Die Ansteuerung für die DP-Antriebe
2. Die Auswertung der Z-Unten-Lichtschranke.
Die SCS besteht aus einer Trägerplatte und zwei Plati-
nen (Control-Modul und einem Power-Modul).
Die Energie- und Datenversorgung erfolgt über den
Kopf-CAN-Bus vom Zwischenverteiler, Energie- und
Datenübertrager zur SCS.
An der SCS befinden sich zwölf Stecker, welche die
Verbindung für die Energie- und Datenversorgung zu
den DP-Antrieben herstellen.
2.1.9 DP-Antrieb
Abb.15: DP-Antrieb
1. Der Stecker wird an der Regeleinheit der SCS
gesteckt und verschraubt.
2. Motor
3. Anschraubfläche für die Linearführung
4. Vakuumanschluss
5. Messsystem
Auflösung: 278digitproGrad bzw.
100.000digitproUmdrehung
6. Kamera-Hintergrund (schwarz) DP-Antrieb
7. Pipettenschnittstelle
Der DP-Antrieb hat die Aufgabe die Pipette in die rich-
tige Abhollage und das Bauelement in die richtige Be-
stücklage zu drehen.
Durch die Motorwelle des DP-Antriebs werden das
Haltekreis-Vakuum und die Blasluft und das Vakuum
des Druckregelventils an der Pipette bereitgestellt.
2 Modul-Übersicht
2.1 CPP-Kopf
22 Serviceanleitung SIPLACE Multistar (CPP / CPP M) 02/2018
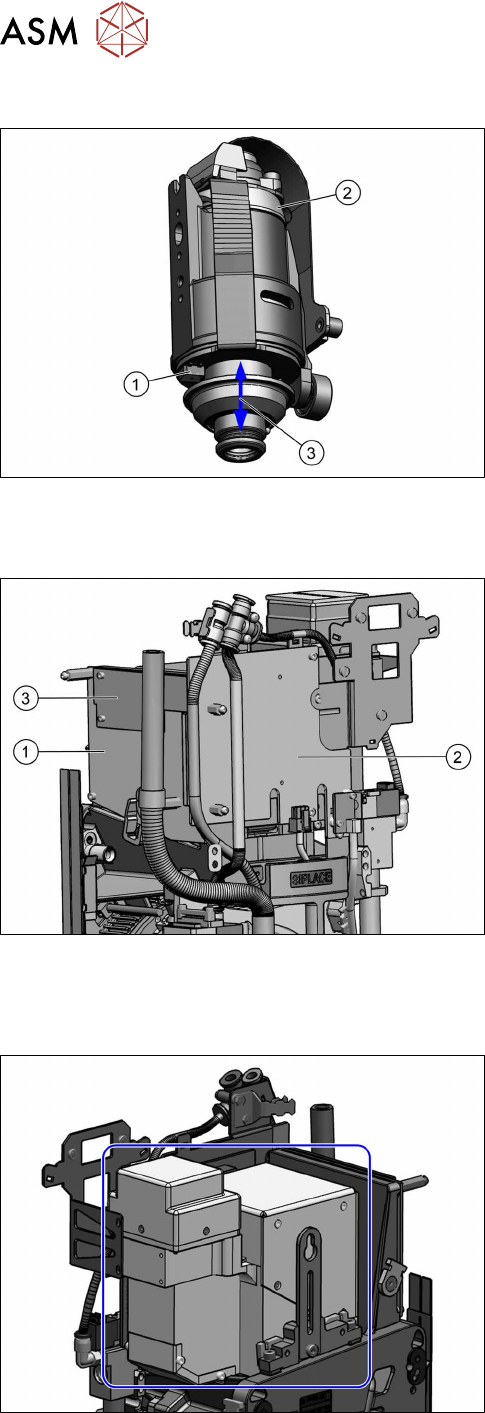
2.1.9.1 Funktionsweise des DP-Antriebs
Abb.16: Funktionsweise des DP-Antriebs
1. Lichtschranke unten
2. Messsystem
3. Einfederweg zum Betätigen der Lichtschranke
unten
Die DP-Antriebe werden von der SCS-Platine entspre-
chend den Zählimpulsen und den Sollwerten (für
Abholwinkel, Bestückwinkel und Korrekturwinkel nach
Vision) gesteuert.
Die Rückmeldung über die Position des DC-Motors
wird über ein inkrementelles Messsystem überwacht.
2.1.10 Zwischenverteiler 1 und 2 (ZV1 und ZV2)
Abb.17: Zwischenverteiler (ab Version 05)
1. Zwischenverteiler 1
2. Zwischenverteiler 2
3. Platine KE-Ansteuerung ZV2 für kontaktlose
Datenübertragung (ab Version 05)
Funktionen des Zwischenverteilers:
●
LEDs zeigen die Betriebsspannungen am Kopf
und die Zustände der Sensoren
●
Teststecker für Spursignale und Testpins für ana-
loge Signale
●
Geregelte Stromversorgung für Inkrementalgeber
von Z- und Stern-Antrieb
●
Schnittstelle für BE-Sensor, Vakuumeinheit,
Vakuumsensor-Haltekreis und EEPROM
●
Ansteuerschaltung für den Rückholzylinder
2.1.11 BE-Kamera
Abb.18: BE-Kamera
BE-Kamera
Verfügbare Typen:
●
SST23
●
SST29
●
SST30
●
SST38
●
SST45
Die BE-Kamera ist in der 12-Uhr-Position montiert.
Sie hat die Aufgabe das Bauteil optisch zu erkennen
und deren Mittelpunkt zu berechnen.
Die BE-Kamera wertet die ermittelten Daten aus und
rechnet den Offset zwischen Bauteil- und Pipetten-
Mittelpunkt sowie den Winkel in die Bestückposition
ein.