JUKI_KE-3010A_MAINTE_CH.pdf - 第271页
维修调整要领书 14 - 23 14 -6- 2 . LED 显示 Zθ 伺服放大器里安装有 9 个 LE D 。 该 LED 按下表所示表示各轴的状态。各轴与 LE D 的对应如下。 表 14-6-2- 1 Z θ 驱动器的 LED NO. LED 名称 显示色 动作 1 CHARGE 主电路存在电荷时亮灯。 2 RD1 绿 显示第 1 轴( L2θ 、 L4θ 、 L6θ 轴)的状态 以 RD1 、 AL1 的组合所表示的状态参照下…
维修调整要领书
14-22
14-6.
Z/θ
装置
Z/θ 装置由驱动贴装头的Z θ 軸的AC伺服放大器构成。
14-6-1.
Z/θ
装置的构成
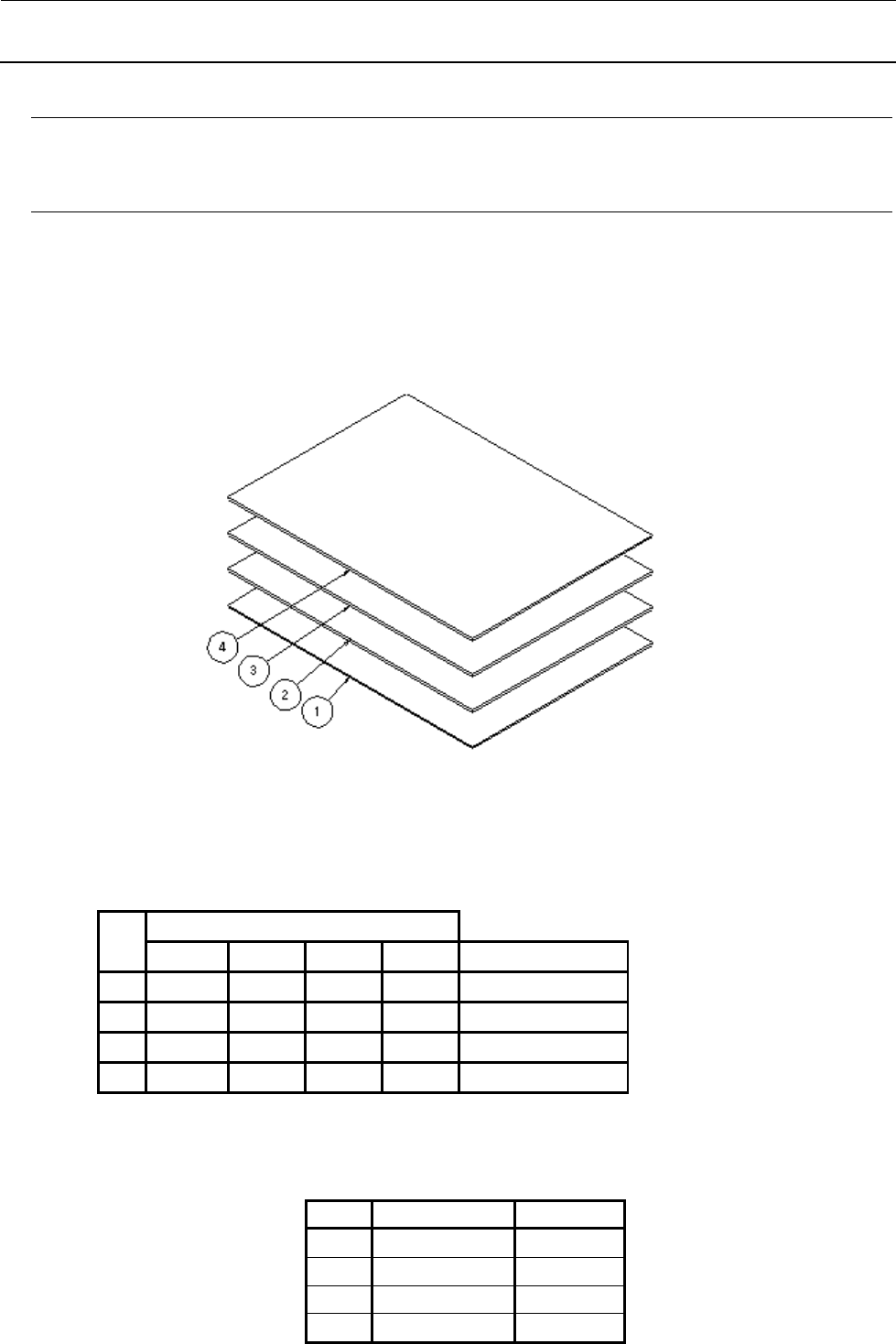
Zθ 用的伺服放大器是 4 轴一体式的伺服放大器,可用 1 个放大器基板駆动 4 轴。
伺服放大器基板安装在贴装头装置内。在上下方向安装 4 块。
只有 KE-3010A 是实装 3 块(④未实装)。
各马达与伺服放大器的关系如图 14-6-1-1 所示。
图
14-6-1-1 Z/θ
装置的构成图
<马达输出>
Z 轴:30W
θ 轴:10W
表
14-6-1-1 Z/θ
装置的配置关系图
记
号
放大器上的轴 No
第
1
轴
第
2
轴
第
3
轴
第
4
轴
货号
① L2θ 轴 L2Z 轴 L1θ 轴 L1Z 轴
40129650
② L4θ 轴 L4Z 轴 L3θ 轴 L3Z 轴
40129650
③ L6θ 轴 L6Z 轴 L5θ 轴 L5Z 轴
40129650
④ 未使用 未使用 ICθ 轴 ICZ 轴
40129650
Zθ 伺服放大器要根据基板设置旋转开关(CS1)。
表
14-6-1-2
选轴旋转开关设置值
记号 伺服放大器 SW 设置值
① L1、2 Z/θ 轴
0
② L3、4 Z/θ 轴
4
③ L5、6 Z/θ 轴
8
④ IC Z/θ 轴
C
←
KE-3010A中未实装
←
KE-3010A中未实装
维修调整要领书
14-23
14-6-2.
LED
显示
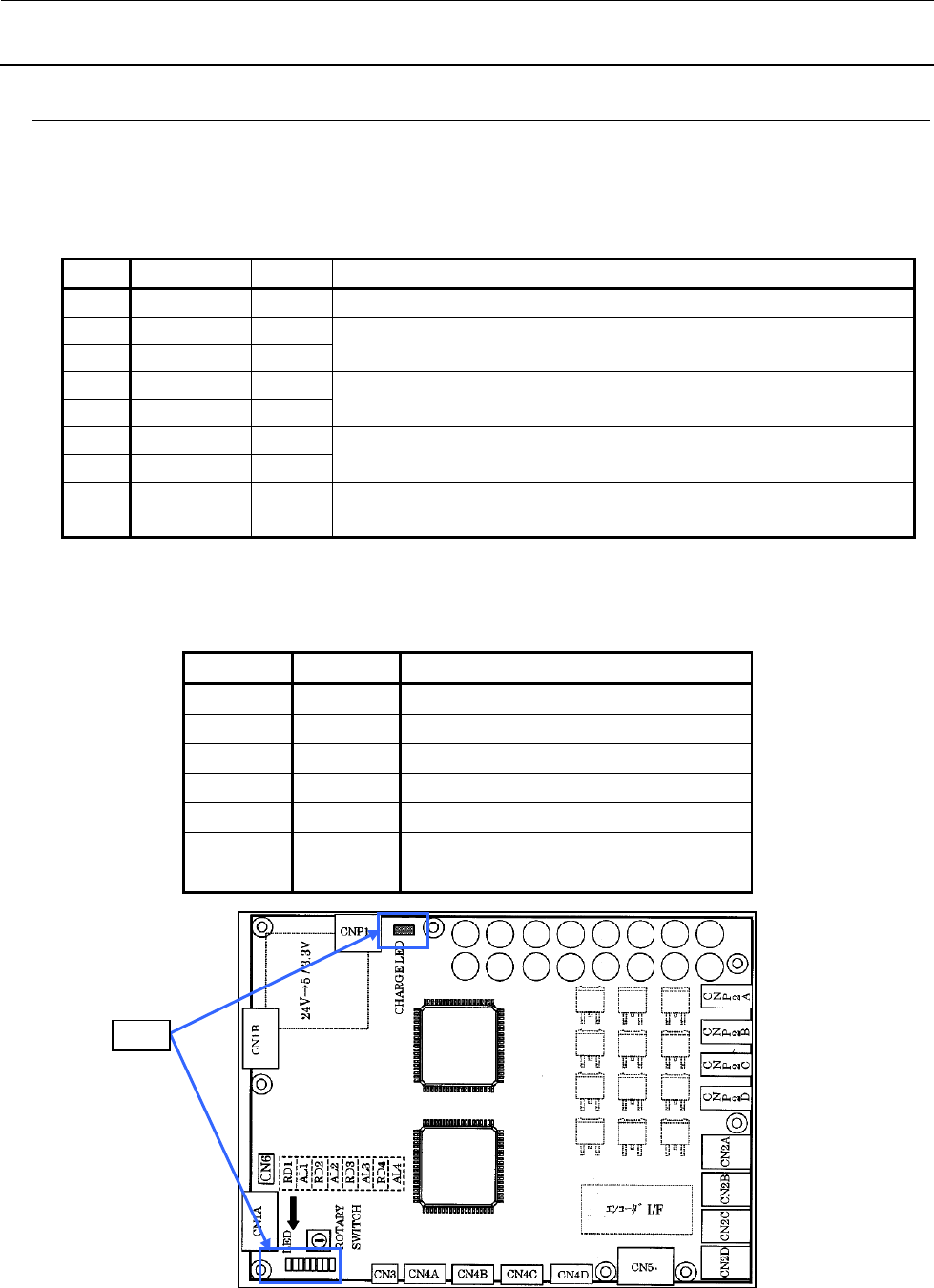
Zθ 伺服放大器里安装有 9 个 LED。
该 LED 按下表所示表示各轴的状态。各轴与 LED 的对应如下。
表
14-6-2-1 Zθ
驱动器的
LED
NO.
LED 名称
显示色
动作
1
CHARGE
主电路存在电荷时亮灯。
2
RD1
绿
显示第
1
轴(
L2θ
、
L4θ
、
L6θ
轴)的状态
以 RD1、AL1 的组合所表示的状态参照下表。
3
AL1
红
4
RD2
绿
显示第
2
轴(
L2Z
、
L4Z
、
L6Z
轴)的状态
以 RD2、AL2 的组合所表示的状态参照下表。
5
AL2
红
6
RD3
绿
显示第
3
轴(
L1θ
、
L3θ
、
L5θ
、
ICθ
轴)的状态
以
RD3
、
AL3
的组合所表示的状态参照下表。
7
AL3
红
8
RD4
绿
显示第
4
轴(
L1Z
、
L3Z
、
L5Z
、
ICZ
轴)的状态
以
RD4
、
AL4
的组合所表示的状态参照下表。
9
AL4
红
以 RD*、AL*的组合所表示的动作状态如下。
表
14-6-2-2 Zθ
驱动器之
LED
亮灯与闪烁状态的组合
RD*
AL*
状态
闪烁
闪烁
未连接控制器(刚接通电源后)
闪烁
熄灯
伺服
OFF
亮灯
熄灯
伺服
ON
熄灯
闪烁
发生警告
熄灯
亮灯
发生报警
亮灯
亮灯
S/W
安装状态
熄灯
熄灯
控制电源
OFF
图
14-6-2-1 Z/θ
放大器的
LED
LED
维修调整要领书
14-24
14-7.
传送装置
14-7-1.
传送装置的构成
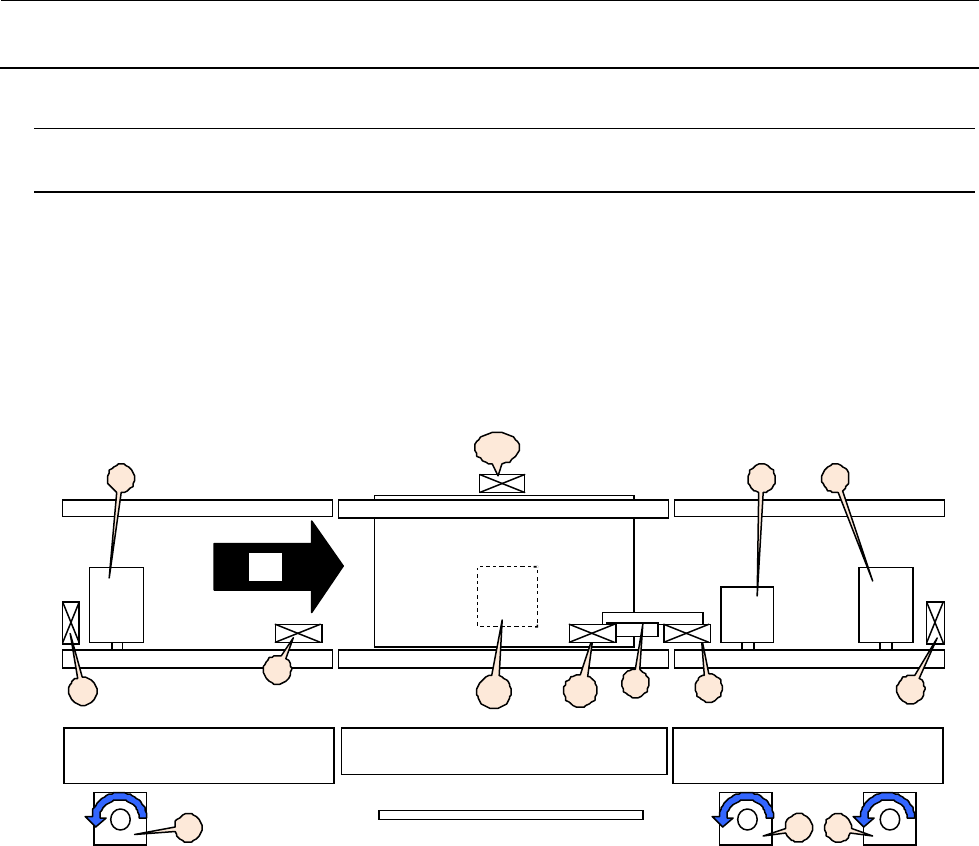
传送装置的构成图如图 14-7-1-1 所示。
在座架下的前左侧安装 BASE I/O 基板,在座架上的后右侧安装传送步进电动机用的驱动器以及支
撑台之步进电动机用的驱动器。
所谓支承台也称作 BU(backup table)。
传送装置内的传送 L、传 送 R 马达、传送 L 传感器、传送 R 传感器、WAIT 传感器没有必要根据基准、
流向而改变插接器的连接处。
① 传送 L 马达(步进马达)
② 传送 CENTER 马达(步进马达)
③ 传送 R 马达(步进马达)
④ 传送 L 传感器
⑤ WAIT 传感器
⑥ STOP 传感器
⑦ C・OUT 传感器
⑧ 传送 R 传感器
⑨ 止动器
⑩ 支撑台马达(步进马达)
⑪ BU 原点传感器
图
14-7-1-1
传送装置
A
1
1
3
3
2
2
4
5
6
7
8
11
10
9