3. SM471_Introduction(Kor_Ver1).pdf - 第30页
Samsung Component Place r SM471 Introduction xvi Module 전체 시스템 중 비교적 독 립적인 한 부분으로 동작이 가능한 기구적인 단위를 의미합니다 . Spindle 회전하는 작은 축으 로 장비의 Head As sembly 에 속해 있고 끝에 Nozzle Holder 가 달려있는 구조로 되어 있습니다 . 매우 정밀하게 구동되는 Ti m i n g…
머리말
xv
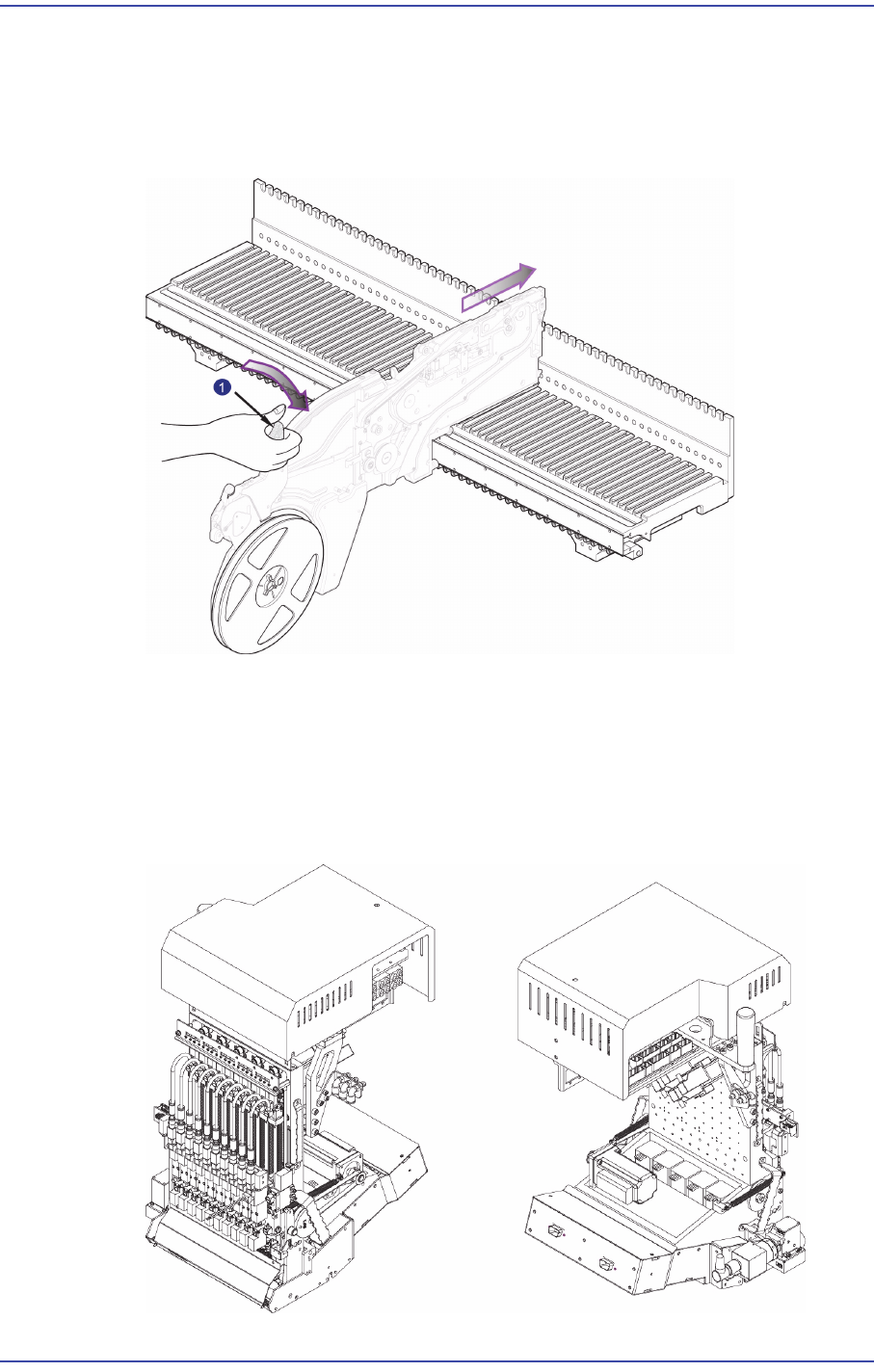
Tape Feeder
릴 형태
의 부품케이스에 Roll방식으로 감겨진 부품을 공급하는 기계장치로 피
더베이스에 장착(Installation)됩니다. 다음 그림과 같이 반드시 피더베이스에
SM피더를 장착 후, 잠금 손잡이를 잠궈야 합니다.
1:
잠금
손잡이
Head Assembly
헤드 어셈
블리에 속해 있는 기구물들 또는 공압장치들을 지지하는 Head Body와
Spindle과 구동모터 그리고 부품 및 Fiducial Mark의 형상을 인식하는 Flying
Vision Module과 Fiducial Camera 등으로 구성됩니다.
Samsung Component Placer SM471 Introduction
xvi
Module
전체 시스템 중 비교적 독
립적인 한 부분으로 동작이 가능한 기구적인 단위를
의미합니다.
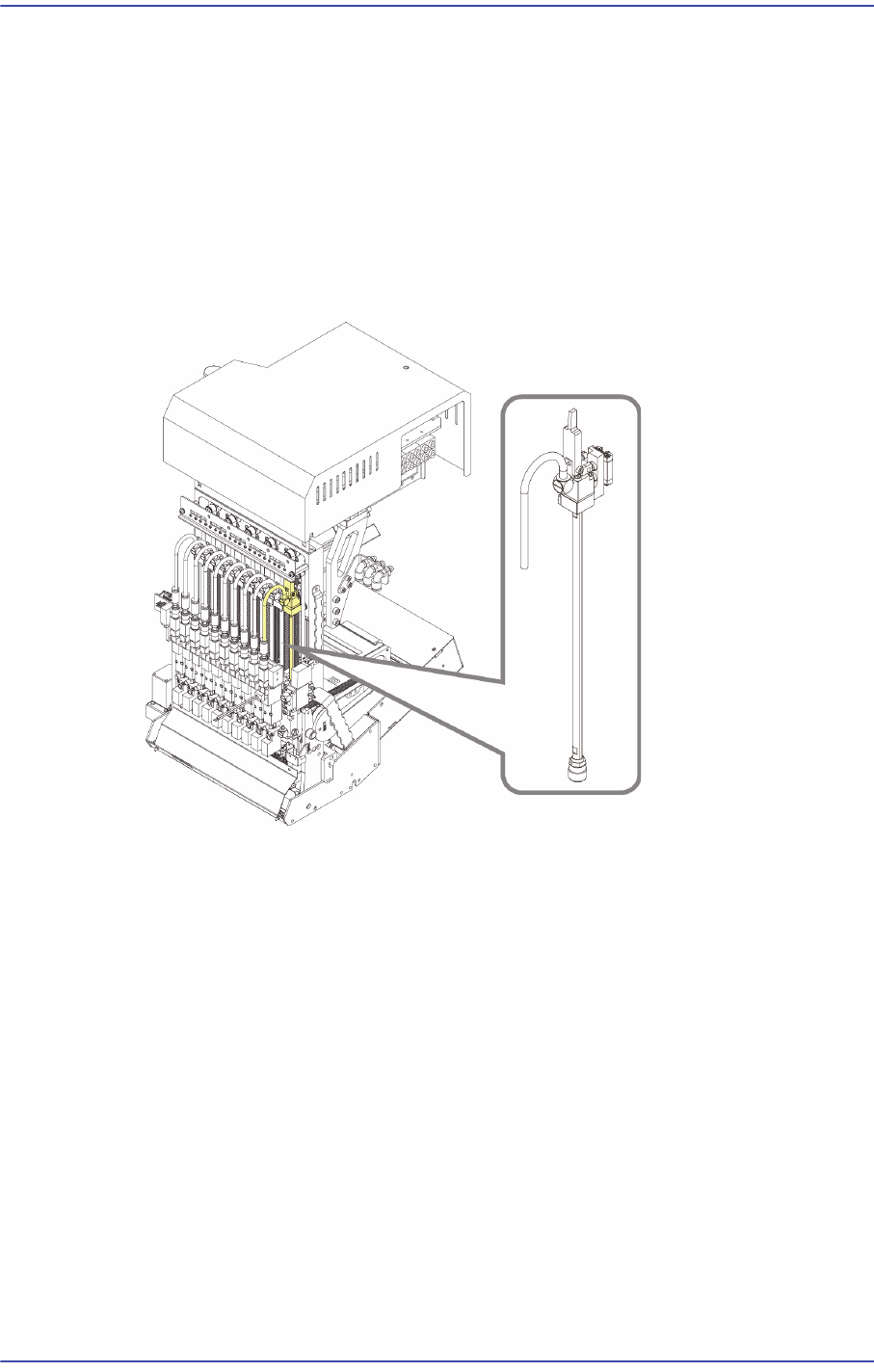
Spindle
회전하는 작은 축으
로 장비의 Head Assembly에 속해 있고 끝에 Nozzle Holder가
달려있는 구조로 되어 있습니다. 매우 정밀하게 구동되는 Timing Belt 와 Servo
Motor를 통해 부품의 흡착과 장착을 위한 Z축 동작을 수행하고, Micro Step
Motor를 통해 부품 위치의 보정을 위한 R 축 동작을 수행합니다.
미소 칩(Micro Chip)
0402, 0603 칩 부품
과 같이 크기가 아주 작은 칩 부품을 의미합니다.
피치 (P
itch)
일정하게 대
응되는 두 지점 간의 간격을 의미합니다 .
머리말
xvii
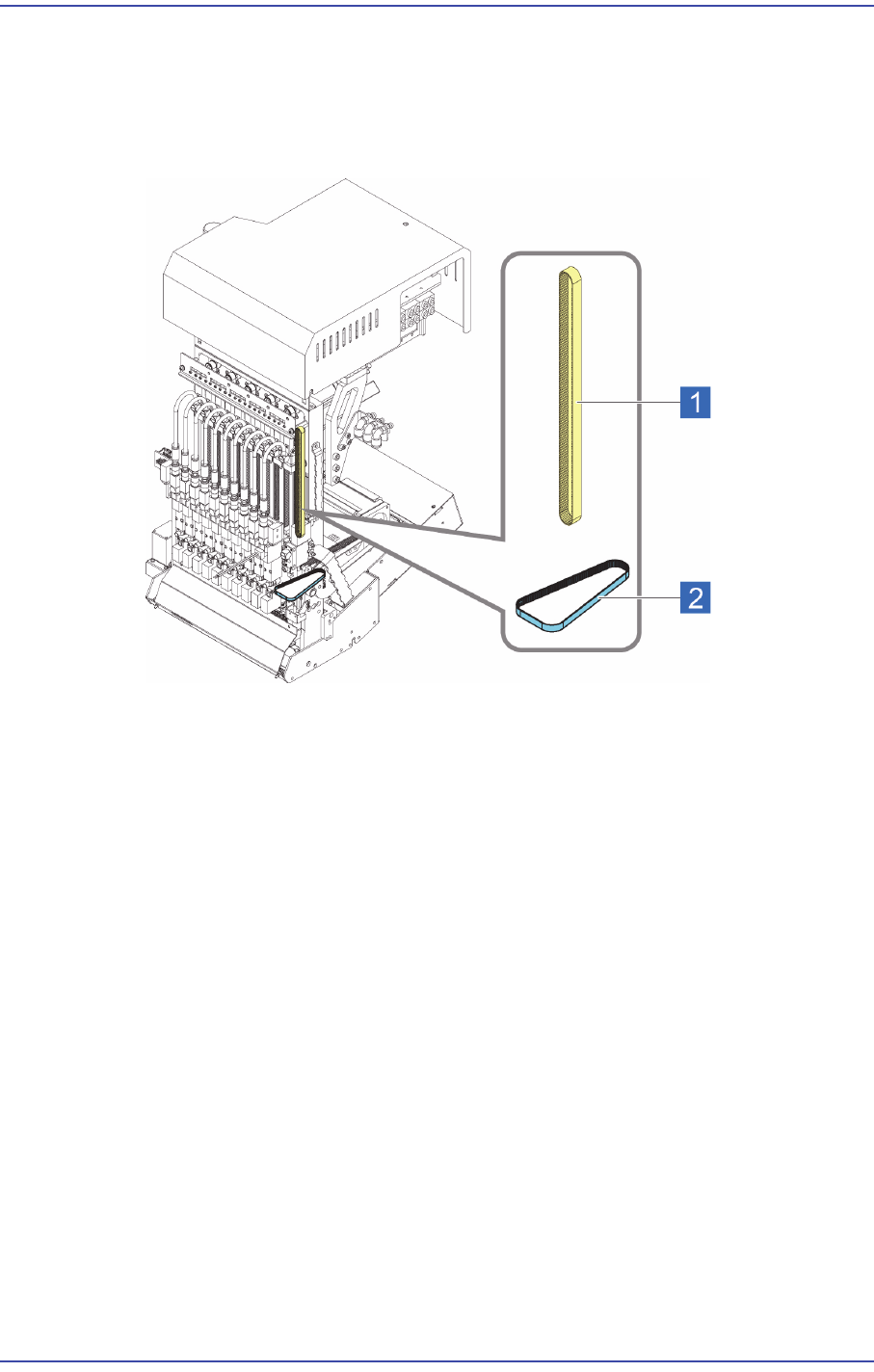
Timing Belt
모터의 구동 축과 실제 구동
되어지는 대상의 구동 축을 연결해 주는 벨트로, 두
축간의 구동비를 고려한 기어비를 가지고 있어 정확한 구동 제어를 가능하게 해
줍니다.
1: Z
축
Timing Belt
2: R
축
Timing Bel
Twin Servo System
Y축의 구동속
도를 향상시키기 위해, Y 축 구동모터를 양 쪽의 Y축 프레임에 각
기 설치하여, 2 개의 Servo Motor를 이용하여 Y축 구동하는 방식을 의미합니다 .
그러므로, 반드시 장비의 설치나 이동 후, 반드시 Skew Compensation을 실시해
야 합니다.
AC Servo Motor
AC(교류)전원을 이
용하여 구동되는 모터로 정밀한 구동제어를 위해서 엔코더
를 장착하고 있습니다. 엔코더는 모터 구동 축에 장착이 되어 모터 축의 움직임
을 펄스형태로 모터의 구동을 제어하는 장치에 보내서 모터에 인가되는 입력과
출력이 같아지도록 보정할 수 있는 정보를 제공합니다.