00197786-02_SI_SIPLACE_HeadVerification_DE.pdf - 第61页
6 Beschreibung der Testergebnisse 6.12 Kraftmessung P&P-Modul (TH) Software Manual SIPLACE Head Verification 03/2018 61 6.12.3 Interpretation der erzielten Ergebnisse "Force"-Fehler Ursache Lösung Kraftsens…
6 Beschreibung der Testergebnisse
6.12 Kraftmessung P&P-Modul (TH)
60 Software Manual SIPLACE Head Verification 03/2018
6.12 Kraftmessung P&P-Modul (TH)
6.12.1 Prinzip der Messung
Während der Kraftmessung wird die Aufsetzkraft für das Segment bei verschiedenen Winkeln ge-
messen.
Die folgenden Kraftmessungen stehen für P&P-Module zur Verfügung:
●
Kraft 1N (dynamisch)
●
Kraft 2N (dynamisch)
●
Kraft 5N (dynamisch)
●
Kraft 10N (dynamisch)
●
Kraft 15N (dynamisch)
6.12.2 Messergebnis
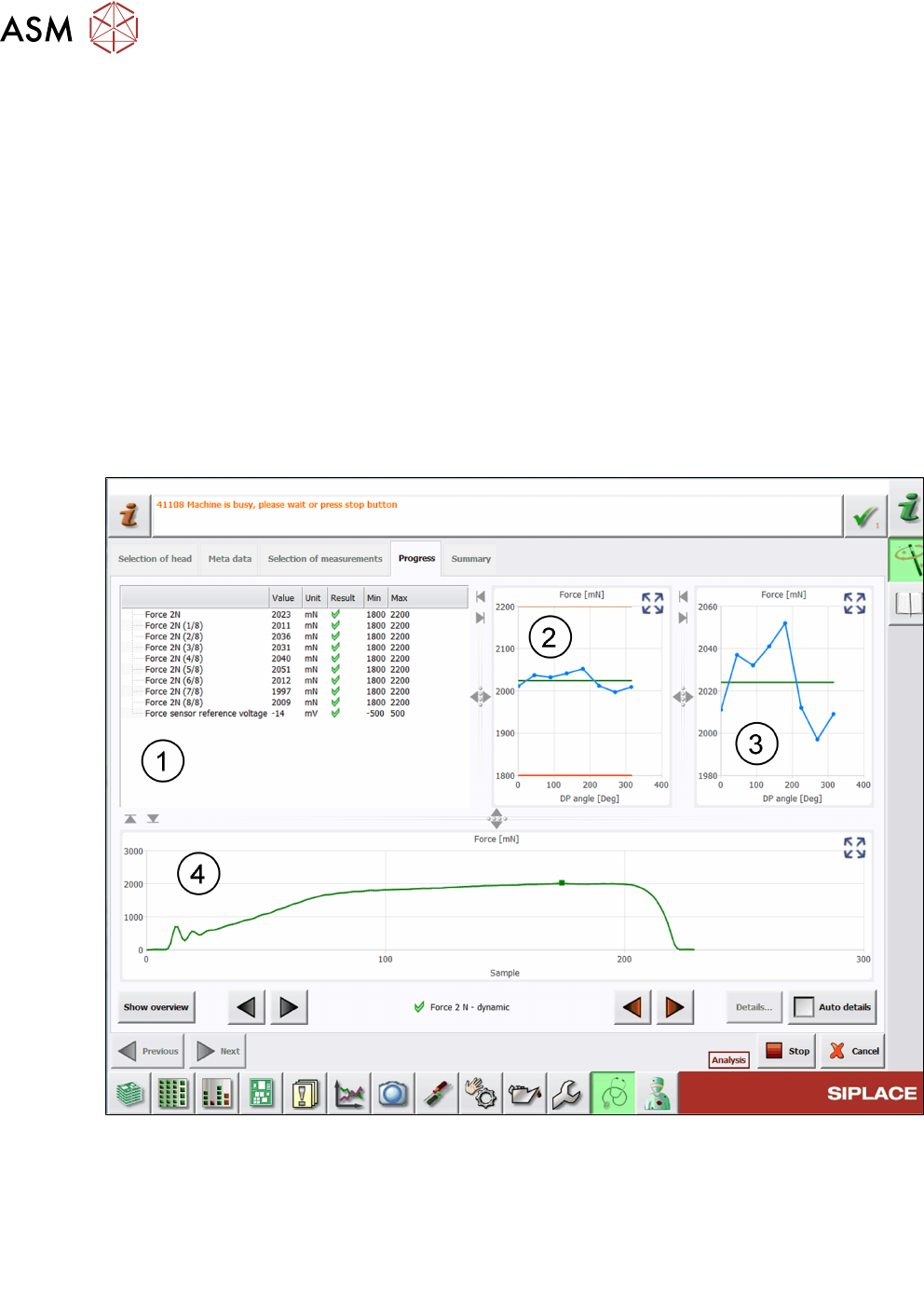
Im folgenden Bild ist ein Beispiel für die Messung "Force 2N (dynamic)" gezeigt:
Abb.44: Ergebnisansicht – Force 2N (dynamic)
1 Tabelle mit bei verschiedenen Winkeln gemessener Force.
2 Graph mit Anzeige der bei verschiedenen Winkeln gemessenen Force-Werte und angege-
benen Grenzwerten.
3 Graph mit detaillierter Anzeige der bei verschiedenen Winkeln gemessenen Force-Werte.
4 Graph mit einem detaillierten Beispiel der Force-Messung.
6 Beschreibung der Testergebnisse
6.12 Kraftmessung P&P-Modul (TH)
Software Manual SIPLACE Head Verification 03/2018 61
6.12.3 Interpretation der erzielten Ergebnisse
"Force"-Fehler
Ursache Lösung
Kraftsensor-Einstellungen falsch aus-
gerichtet
► Federkrafteinstellungen justieren.
Kraftmesseinheit defekt ► Kraftmesseinheit austauschen.
► P&P-Modul austauschen/reparieren.
Trick- & Federeinheit defekt ► Trick- & Federeinheit austauschen
► P&P-Modul austauschen/reparieren.

6 Beschreibung der Testergebnisse
6.13 Kraftsensor-Kalibrierung/Kraftsensor-Kalibrierung (abschließend)
62 Software Manual SIPLACE Head Verification 03/2018
6.13 Kraftsensor-Kalibrierung/Kraftsensor-Kalibrierung
(abschließend)
6.13.1 Prinzip der Messung
Die Force sensor calibration dient zur Vorbereitung, um sicherzustellen, dass der Kraftsensor für
die nachfolgende Kraftmessung betriebsbereit ist.
Die Force sensor calibration (final) wird nach einem Dauerlauf durchgeführt, um die Systemzu-
verlässigkeit nach mehreren Zyklen zu überprüfen.
●
Während der Sensor calibration wird die Z-Achse mehrere Male bei 8 verschiedenen Win-
keln nach unten auf den Kraftsensor bewegt, um zu prüfen, ob der Kraftsensor einsatzbereit
ist.
●
Während der Spring preload-Messung wird die Z-Achse mehrere Male bei 8 verschiedenen
Winkeln nach unten auf den Kraftsensor bewegt, um die mechanische Position des Kraftsen-
sor-Betätigers zu prüfen.
●
Die Messung Force 1N, Force 15N und DP positioning time wird als Schnellüberprüfung
verwendet, um die Sensor calibration und die Spring preload-Messung zu prüfen.
6.13.2 Messergebnis
Abb.45: Ergebnisansicht - Force sensor calibration
1 Für die Sensor calibration und die Messung Spring preload ermittelte Werte.
2 Für Force 1N, Force 15N und DP positioning time während der Schnellüberprüfung er-
mittelte Werte.
3 Graphen mit Anzeige der Sensor calibration-Werte für die zulässigen Toleranzen sowie
detaillierte Anzeige.
4 Graphen mit Anzeige der Spring preload-Werte für die zulässigen Toleranzen sowie de-
taillierte Anzeige.