00197786-02_SI_SIPLACE_HeadVerification_DE.pdf - 第79页
6 Beschreibung der Testergebnisse 6.20 Segmentoffset oben und unten Software Manual SIPLACE Head Verification 03/2018 79 6.20 Segmentoffset oben und unten 6.20.1 Prinzip der Messung Bei der Messung Segment offset up &…
6 Beschreibung der Testergebnisse
6.19 Segmentoffset oben und unten (schnell)
78 Software Manual SIPLACE Head Verification 03/2018
13 Tabelle mit Angabe des größten und kleinsten ermittelten Wertes:
●
UpX = UpX
max
- UPX
min
●
UpY = UpY
max
- UPY
min
●
DownX = Down X
max
- DownX
min
●
DownY = Down Y
max
- DownY
min
6.19.3 Interpretation der erzielten Ergebnisse
"Up X"- und "Up Y"-Fehler bei allen Segmenten
Ursache Lösung
Fehlerhafte Nullpunktkorrektur des Sterns. ► Nullpunktkorrektur des Sterns prüfen.
"Down X"- und "Down Y"-Fehler bei allen Segmenten
Ursache Lösung
Linearlager der Z-Achse locker oder defekt. ► Z-Achse prüfen/austauschen.
"Up X"-, "Up Y"-, "Down X"- und "Down Y"-Fehler bei einzelnen Segmenten:
Ursache Lösung
Segment verbogen, möglicherweise nach
Crash.
► Segment (DP) austauschen.
Linearlager des Segments defekt ► Linearlager (DP) austauschen.
6 Beschreibung der Testergebnisse
6.20 Segmentoffset oben und unten
Software Manual SIPLACE Head Verification 03/2018 79
6.20 Segmentoffset oben und unten
6.20.1 Prinzip der Messung
Bei der Messung Segment offset up & down wird geprüft, inwieweit sich ein Segment außerhalb
der Rotationsachse befindet. Diese Exzentrizität wird auch als Segmentoffset bezeichnet.
●
Bei "Segment offset up" wird die Rotation (Offset) des Segments im angedockten Zustand (Z-
Achse oben), bei "Segment offset down" die Rotation des Segments in der unteren Position
(Z-Achse unten) gemessen.
●
Die Positionen zeigen daher die Exzentrizität der Segmentachse in der Abhol- oder Bestück-
position, auch als Offset zwischen BE- und LP-Kamera bezeichnet.
Die Messung wird für jedes Segment in der oberen oder unteren Position bei vier Winkeln (0°, 90°,
180° und 270°) durchgeführt, um die exakte Rotation zu bestimmen und den Einfluss der Z-Ach-
sen-Linearführung zwischen oberer und unterer Segmentposition zu berechnen.
HINWEIS
Segment ist für Bestückungen nicht mehr geeignet
Die Messung ist eine Voraussetzung für die Bestückgenauigkeit der Maschine, da die er-
mittelten Werte für die Berechnung der tatsächlichen Bestückposition verwendet werden.
Bei den spezifischen Grenzwerten werden die Konstruktions- und Produktionstoleranzen
befolgt, die durch die Software kompensiert werden können. Wenn die Segmentoffsets die
Grenzwerte überschreiten, wurde das Segment meist mechanisch deformiert und kann für
eine genaue Bestückung nicht mehr verwendet werden.
► Tauschen Sie das Segment aus, bevor Sie weitere Messungen durchführen.
Die Messung bietet Feedback zu den folgenden Teilen:
●
Deformierte Segmente (DP/Linearführung)
●
Defekte Z-Achsen-Linearführungen
6 Beschreibung der Testergebnisse
6.20 Segmentoffset oben und unten
80 Software Manual SIPLACE Head Verification 03/2018
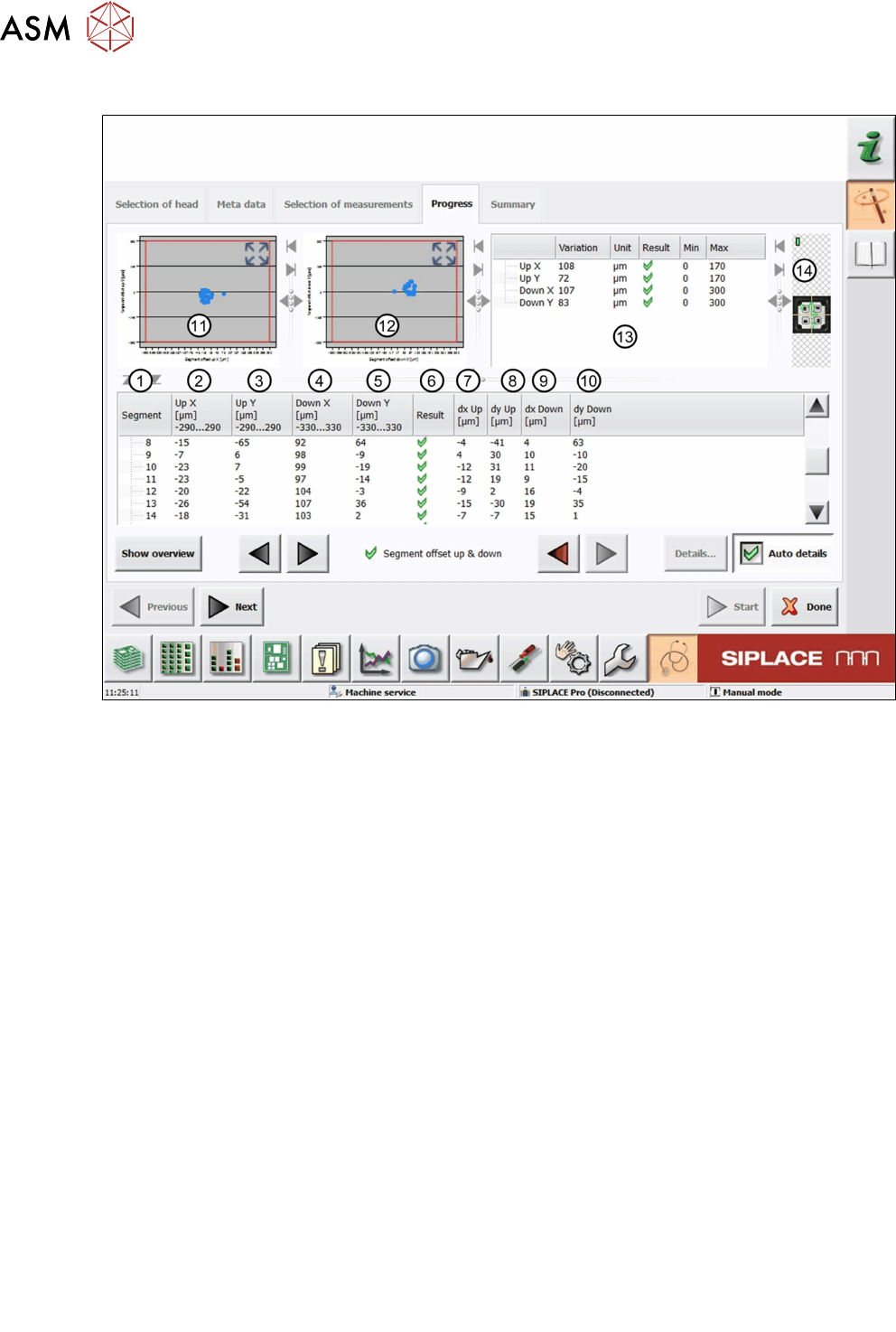
6.20.2 Messergebnis
Abb.54: Ergebnisansicht – Segment offset up & down
1 Gemessenes Segment
2 Für das Segmentoffset UpX von Segment 1 wird eine andere Berechnung verwendet als
für alle anderen Segmente.
Für Segment 1 wird UpX aus dem Mittelwert der gemessenen X-Offsets (BE- zu LP-
Kamera) bei einem Winkel von 0°, 90°, 180° und 270° plus dem Wert dxUp berechnet:
UPX
Segment 1
= MeanOffsetX
0°, 90°, 180° und 270°
+ dxUp
Segment 1
Für alle anderen Segmente wird UPX mithilfe von Segment 1 als Referenzposition be-
rechnet:
UPX
Segment n
= UPX
Segment 1
- (dxUp
Segment 1
– dxUp
Segment n
)
3 Der Segmentoffset UpY wird auf die gleiche Weise wie für UpX berechnet:
UPY
Segment 1
= MeanOffsetY
0°, 90°, 180° und 270°
+ dyUp
Segment 1
UPY
Segment n
= UPY
Segment 1
- (dyUp
Segment 1
– dyUp
Segment n
)
4 Der Segmentoffset DownX wird auf die gleiche Weise wie für UpX berechnet:
DownX
Segment 1
= MeanOffsetX
0°, 90°, 180° und 270°
+ dxDown
Segment 1
DownX
Segment n
= DownX
Segment 1
- (dxDown
Segment 1
– dxDown
Segment n
)
5 Der Segmentoffset DownY wird auf die gleiche Weise wie für UpX berechnet:
DownY
Segment 1
= MeanOffsetY
0°, 90°, 180° und 270°
+ dyDown
Segment 1
DownY
Segment n
= DownY
Segment 1
- (dyDown
Segment 1
– dyDown
Segment n
)
6 Result-Anzeige mit Angabe, ob die Werte innerhalb (grüner Haken) oder außerhalb (rotes
Kreuz) der Grenzwerte liegen.
7 Der Segmentoffset dxUp wird aus dem Mittelwert der Segmentposition zur BE-Kamera-
mitte bei einem Winkel von 0°, 90°, 180° und 270° berechnet.
8 Der Segmentoffset dyUp wird aus dem Mittelwert der Segmentposition zur BE-Kamera-
mitte bei einem Winkel von 0°, 90°, 180° und 270° berechnet.