0197787-01_UM_HeadVerification_708_EN.pdf - 第55页
SIPLACE Head V erification User Manual Edition 01/2015 55 As the "Segment off set down" for segm ent 1 is the ref erence value for a ll other segm ent offsets, the actual segm ent offset value dx Dow n [µm] is …
SIPLACE Head Verification
User Manual Edition 01/2015
54
4.9.2 Explanation of Measurement Results in "Progress" Menu
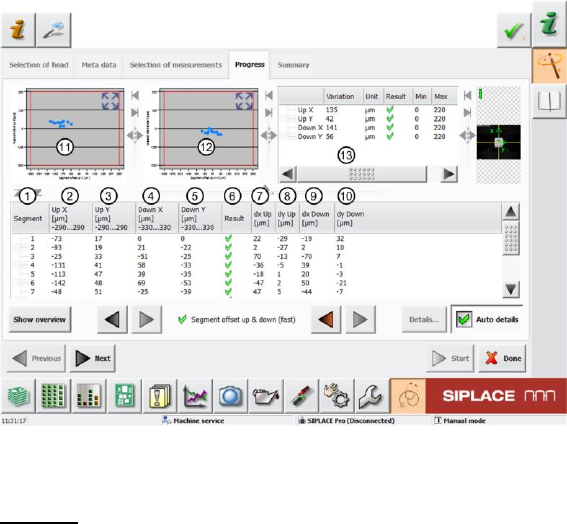
After completion of the measurement, the following results appear in the "Progress" menu:
Figure 36: Segment offset up and down (fast) result
Legend:
1. Segment measured
2. Calculated "Segment offset up" value Up X [µm] from measurement at an angle of 0°. This
deviation is determined with the value dx Up [µm] (7), as the actual segment offset measured
to the component camera center. The calculated "Segment offset up" value Up X [µm] is
calculated from the offset between the component and PCB camera.
The segment offset values Up X [µm] determined must always be in a certain tolerance range
(in our example -290..290µm). This value defines a permissible segment offset within the
construction and production tolerances, which can still be compensated by the software. If the
segment offset values are outside the tolerances, we can assume that the segment has been
mechanically deformed, so that it has been bent and is no longer suitable for accurate
placement.
3. Calculated "Segment offset up" value Up Y [µm] from measurement at an angle of 0°. This
deviation is determined with the value dy Up [µm] (8), as the actual segment offset measured
to the component camera center. The calculated "Segment offset up" value Up Y [µm] is
calculated from the offset between the component and PCB camera.
The segment offset values Up Y [µm] determined must always be in a certain tolerance range
(in our example -290..290µm). This value defines a permissible segment offset within the
construction and production tolerances, which can still be compensated by the software. If the
segment offset values are outside the tolerances, we can assume that the segment has been
mechanically deformed, so that it has been bent and is no longer suitable for accurate
placement.
4. Calculated "Segment offset down" value Down X [µm] from measurement at an angle of 0°.
This value is calculated from the actual "Segment offset down" value dx Down [µm] for this
segment. This offset is illustrated in the value dx Down [µm] (9).
The segment offset values Down X [µm] determined must always be in a certain tolerance
range (in our example -330..330µm). This value defines a permissible segment offset within
the construction and production tolerances, which can still be compensated by the software. If
the segment offset values are outside the tolerances, we can assume that the segment has
been mechanically deformed, so that it has been bent and is no longer suitable for accurate
placement.
The Down X [µm] value for segment 1 is used as a reference value for all other segments
and is therefore always set to 0.

SIPLACE Head Verification
User Manual Edition 01/2015
55
As the "Segment offset down" for segment 1 is the reference value for all other segment
offsets, the actual segment offset value dx Down [µm] is set to 0 for "Down X [µm] = 0"!
The following formula is used for the relationship of all other segments:
Down X [µm] Seg (n) = dx Down [µm] Seg (n) - dx Down [µm] Seg 1
5. Calculated "Segment offset down" value Down Y [µm] from measurement at an angle of 0°.
This value is calculated from the actual "Segment offset down" value dy Down [µm] for this
segment. This offset is illustrated in the value dy Down [µm] (10).
The segment offset values Down Y [µm] determined must always be in a certain tolerance
range (in our example -330..330µm). This value defines a permissible segment offset within
the construction and production tolerances, which can still be compensated by the software. If
the segment offset values are outside the tolerances, we can assume that the segment has
been mechanically deformed, so that it has been bent and is no longer suitable for accurate
placement.
The Down Y [µm] value for segment 1 is used as a reference value for all other segments
and is therefore always set to 0.
As the "Segment offset down" for segment 1 is the reference value for all other segment
offsets, the actual segment offset value dx Down [µm] is set to 0 for "Down X [µm] = 0"!
The following formula is used for the relationship of all other segments:
Down Y [µm] Seg (n) = dy Down [µm] Seg (n) - dy Down [µm] Seg 1
6. Results display (OK green tick / NOK red X)
7. Actual segment offset dx Up [µm] of relevant segment to component camera center during
measurement of calibration component.
8. Actual segment offset dy Up [µm] of relevant segment to component camera center during
measurement of calibration component.
9. Actual segment offset dx Down [µm] of relevant segment to component camera center during
measurement of calibration component.
10. Actual segment offset dy Down [µm] of relevant segment to component camera center during
measurement of calibration component.
11. Diagram for illustration of segment offset values "up" with the following values:
a. Axis of abscissas (X axis) Segment offset up X [µm]
b. Axis of ordinate (Y axis) Segment offset up Y [µm]
c. Red border Min and max tolerances (in our case -290..290µm)
d. Use the button to zoom in on the diagram.
12. Diagram for illustration of segment offset values "down" with the following values:
Axis of abscissas (X axis) Segment offset down X [µm]
Axis of ordinate (Y axis) Segment offset down Y [µm]
Red border Min and max tolerances (in our case -330..330µm)
Use the button to zoom in on the diagram.
13. The following values are displayed in this screen:
e. Dispersion Up X This value is determined by finding the difference between
the lowest value for "Up X" [µm] (2) and the highest values for "Up X" [µm] (2). This
difference must be within a plausible tolerance (in this case 0..220µm).
f. Dispersion Up Y This value is determined by finding the difference between
the lowest value for "Up Y" [µm] (3) and the highest values for "Up Y" [µm] (3). This
difference must be within a plausible tolerance (in this case 0..220µm).
g. Dispersion Down X This value is determined by finding the difference
between the lowest value for "Down X" [µm] (4) and the highest values for "Down X"
[µm] (4). This difference must be within a plausible tolerance (in this case 0..220µm).
h. Dispersion Down Y This value is determined by finding the difference
between the lowest value for "Down Y" [µm] (5) and the highest values for "Down Y"
[µm] (5). This difference must be within a plausible tolerance (in this case 0..220µm).
i. Results display (OK green tick / NOK red X)
SIPLACE Head Verification
User Manual Edition 01/2015
56
4.9.3 Explanation of Measurement Results Using Results PDF
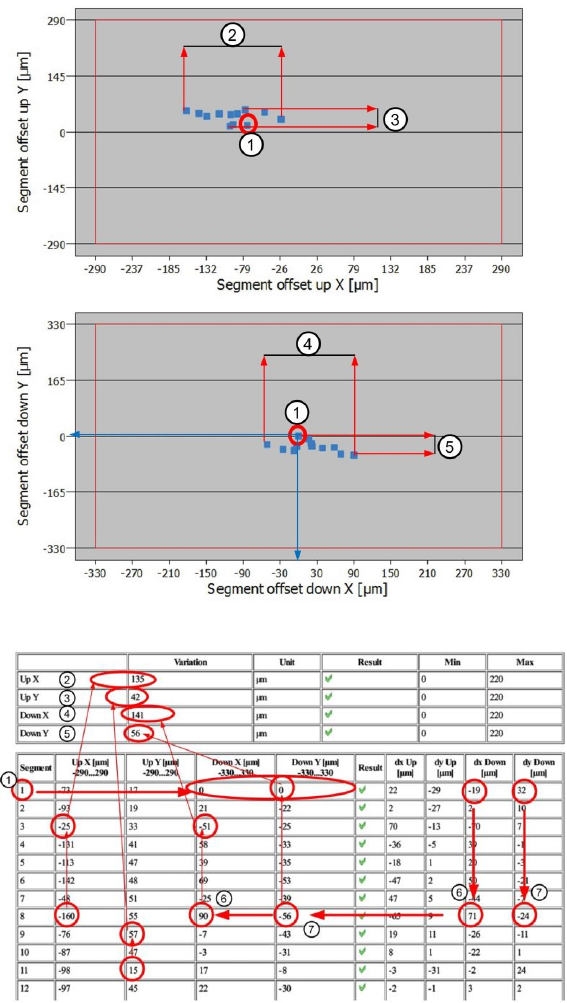
These results can be seen if you scroll down the "Summary" menu or generate a results PDF!
Figure 37: Result PDF for segment offset up and down_1
Figure 38: Result PDF for segment offset up and down_2
Segment 1 shows that the value for the segment offset "Down X" [µm] and "Down Y" [µm] (1) have
each been determined as 0µm. This is the reference value for the reference segment 1, to which all
other offset values for the other segments refer.
The diagram shows that the offset value for "Down X" [µm] and "Down Y" [µm] for segment 1 are
exactly at the 0µm position (see blue arrow)
The "Variation Up X" [µm] (2) value illustrates the maximum dispersion between the segments for
"Segment offset up" in the X direction.
The "Variation Up X" [µm] is calculated as follows:
Variation Up X [µm] = Up X max [µm] – Up X min [µm]