00196512-02_UM_X-Serie_SR705_PL.pdf - 第217页
Instrukcja eksploatacji SIPLACE ser ia X Od wersji oprogramowania SR.70x.xx Ustawianie i uruchamianie Wydanie 01/2011 Infrastruktura mi ejsca ustawienia 217 → Zwracaj uwag ę , aby podczas podnoszenia automatu wid ł y b y…
Instrukcja eksploatacji SIPLACE seria X
Ustawianie i uruchamianie Od wersji oprogramowania SR.70x.xx
Transport i konfiguracja dostawy Wydanie 01/2011
216
Widły poprzecznie do transportera płytek drukowanych 4
4
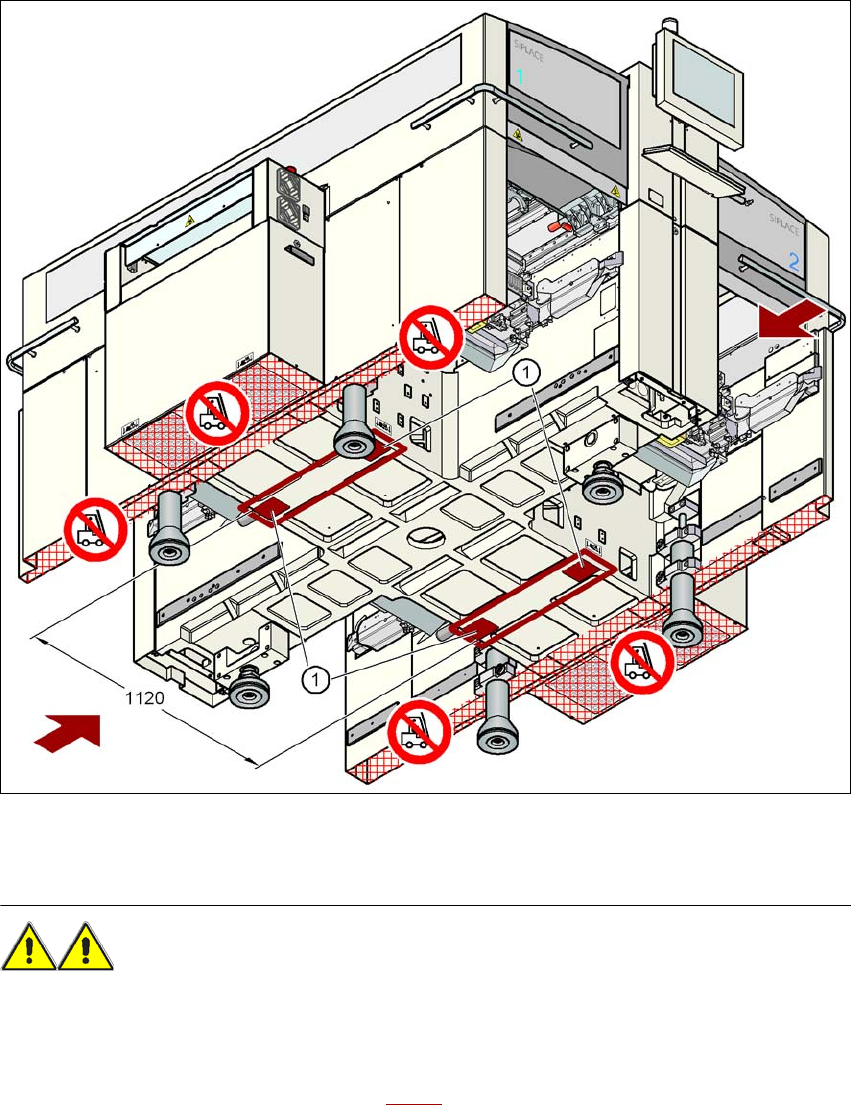
Rys. 4.1 - 4 Powierzchnie przyłożenia - widły poprzecznie do kierunku transportu płytek drukowanych
(1) Powierzchnie przyłożenia wideł wózka widłowego
OSTRZEŻENIE 4
Przed podniesieniem automatu zastosuj się koniecznie do poniższych zaleceń, aby uniknąć nie-
odwracalnych uszkodzeń automatu.
– Rozstaw wideł musi mieścić się w zakresie od 800 do 900 mm. Powierzchnie przyłożenia dla
wózka widłowego są pokazane na rys. 4.1 - 4
. Zewnętrzny odstęp powierzchni przyłożenia
wynosi 1120 mm. Nie wolno powiększać rozstawu wideł tak, aby automat był podnoszony za
boczne części ramy maszyny. Spowodowałoby to zniekształcenie ramy maszyny.
Instrukcja eksploatacji SIPLACE seria X
Od wersji oprogramowania SR.70x.xx Ustawianie i uruchamianie
Wydanie 01/2011 Infrastruktura miejsca ustawienia
217
→ Zwracaj uwagę, aby podczas podnoszenia automatu widły były równomiernie obciążone.
Mocna podkładka między widłami i automatem zapobiega wywróceniu automatu w trakcie
podnoszenia. Można w ten sposób uniknąć jednostronnego obciążenia łap maszyny, co spo-
wodowałoby zniekształcenie ich zamocowania. Radzimy, aby druga osoba obserwowała
podnoszenie automatu, pilnując, aby podczas podnoszenia wózkiem widłowym automat nie
wywrócił się na bok.
4.1.5.4 Co trzeba koniecznie uwzględnić przy transporcie maszyny
OSTRZEŻENIE 4
Koniecznie zwracaj uwagę, aby wszystkie łapy maszyny wisiały swobodnie nad podłożem. Jeżeli
łapy maszyny będą w trakcie transportu ocierać o podłoże lub uderzać o przeszkody, mogą
zostać uszkodzone gwinty w ramie automatu przeznaczone do łap maszyny!
4
4
4
4
4.2 Infrastruktura miejsca ustawienia
4.2.1 Zalecenia dotyczące charakterystyki podłoża
Podłoże automatu musi być twarde i równe, ponieważ siły dynamiczne mogą podczas pracy au-
tomatu wytwarzać drgania w miejscu jego ustawienia. Siła tych drgań zależy od konstrukcji pod-
łoża. Zasadniczo nadają się następujące podłoża, pod warunkiem spełnienia wymagań w
zakresie obciążalności podłoża itd.:
– żelbetowe konstrukcje stropowe, np. stropy w halach przemysłowych,
– żelbetowe płyty podłogowe, np. podłogi betonowe w niepodpiwniczonych halach przemysło-
wych,
– pomieszczenia z podwójną podłogą, jeżeli w przestrzeni między nimi wykonany jest stabilny
fundament. Do takiego fundamentu pośredniego stosują się te same warunki ustawienia.
Fundament może być wykonany z dźwigarów stalowych lub z betonu.
4.2.1.1 Ciężar maszyny i obciążenie powierzchniowe
Wartości ciężarów maszyn i obciążenia powierzchniowego znajdziesz w punkcie 3.3.1, strona
107
.
4
Instrukcja eksploatacji SIPLACE seria X
Ustawianie i uruchamianie Od wersji oprogramowania SR.70x.xx
Infrastruktura miejsca ustawienia Wydanie 01/2011
218
4.2.1.2 Wartości graniczne drgań
Automat jest niewrażliwy na wstrząsy podłoża. Mimo to powinny być zachowane następujące gra-
niczne wartości drgań.
4
4
4
4
4
4.2.2 Zasilanie sprężonym powietrzem
4.2.2.1 Kontrola zasilania sprężonym powietrzem
Sprawdź, czy zasilanie sprężonym powietrzem jest zgodne ze specyfikacją maszyny (patrz tabela
w punkcie 3.2
, strona 105).
WSKAZÓWKA: 4
W dokumentacji "Konfiguracja sieci (elektrycznej i pneumatycznej) dla instalacji SMD u Klienta",
nr kat. 00191409-xx opisane są metody spełniania wymaganej specyfikacji.
→ Zaprotokołuj charakterystykę sprężonego powietrza w miejscu ustawienia.
OSTRZEŻENIE
Nigdy nie odłączaj znajdujących się pod ciśnieniem przewodów sprężonego powietrza. Niebez-
pieczeństwo wypadku! 4
Parametry Wartości
Tercjowy współczynnik widmowy prędkości drgań 5 - 100 Hz
v < 250 µm/s
Wartość v
max
w funkcji czasu
v
max
< 1,5 mm/s