ET8383-說明書(英文).pdf - 第7页
3 ① Put ca rton packing on the floor v ertically , tear up the fixed fi lm. ② Open the top cov er , take fittings in the plast ic foam ③ T ake off plastic foam, two o r more than two people hold up the device, carry to a…
2
device.
While the procedure paused, must inspect before manual operation.
Before starting the operation, make sure that there is no person or obstacle in the
robot’s working area.
Av
oid falling the fittings or having an accident, please take the device and fittings
by help.
Mind head! Attention about the sheet metal.
Carry to an applicable place, install the device on a flat floor.
The pro
duct must be used or stored in an applicable environment.
Working ambient temperature is 0~40℃, relative humidity is 20%~90%.
The eq
uipment is heavy and huge, do not pile up.
Before moving and carrying, make sure the movements is fixed (for example the
X-axis may be fixed by sheet metal or lines for safety).
Unfold the packaging, before using the robot, make sure the movements’ fixt
ure
(for
example the X-axis may be fixed by sheet metal or lines for safety) was t
aken
dow
n.
Install the robot firmly so that it will not be shaken.
Regular
ly inspect and maintain will increase durability and performance.
Must operate the robot by standard procedure.
Before starting a repetitive operation, make sure that no obstacle is in the robot’
s
w
orking area.
P
lease use robot within the standard requirements (such as voltage, air press
ure,
power frequency) as stated in the specification.
Make sure the air source is clean and dry.
Suggest the air pressure is less than 0.7Mpa.
Atte
ntion
Do not throw the packaging and foamed plastic.
If the robot should come back to the manufacture, it must be folded by initial.
The robot must be placed vertically.
The robot can be packet after fold by foamed plastic.
The robot can’t get wet
1
.2 Unpacking and inspection
1.Cart
on packing:
3
① Put ca
rton packing on the floor vertically, tear up the fixed film.
② Open the top cover, take fittings in the plastic foam
③ Take off plastic foam, two or more than two people hold up the device, carry to appropriate station. All
fi
ttings are in the table as follow.
2.Wooden case packing:
① Put wooden case packing on the floor vertically, tear up the fixed film.
② Take the screw out of the wooden case by drill and unfold the wooden case.
③ Take and carry the device by two or more people, put firmly on appropriate station.
④ Unfold the packaging, before using the robot, make sure the movements’ fixture (for example the
X-axis may be fixed by sheet metal or lines for safety) was taken down.
⑤ All fittings are in the table as follow.
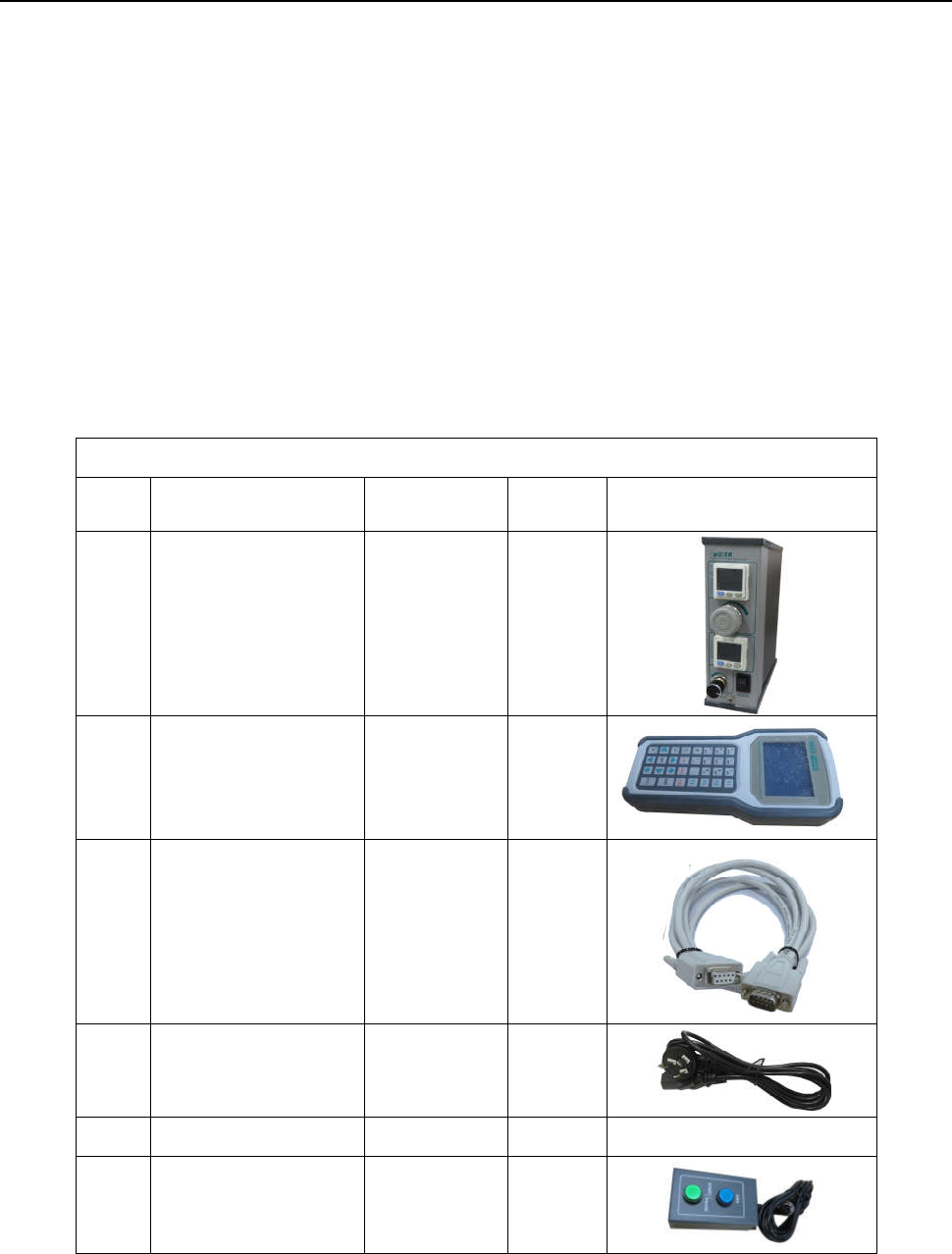
List
No. P
art Name Model Quantity
Im
age
1 Dis
pensing controller 982SL 1pcs
2 T
each pendant 8009 1pcs
3 Teach pendant cord DB9 1pcs
4 Powe
r cord 1pcs
5 I
nstruction manual 2pcs
6 K
ey box 8031A 1pcs
Check
the machine carefully. If you have any problem, please contact the manufacturer immediately.

4
Ⅱ.Summary
The dis
pensing robot is high-precision automatic dispensing equipment with three shafting. The system
provides users with convenient programming instruction, larger storage space, fast processing speed, rich
parameter setting and effective flow control, which can improve production capacity. According to actual
production requirement, on the premise of meet the motion performance index, the optimization design was
carried out on the product structure, to meet the requirements of flexible.
2.1 Features
Comprehens
ive 3-dimensional drawings support, such as 3-dimensional linear interpolation, capabilities of
teaching 3D graphics and user-defined 3D array and so on.
Capable to store with mass storage.
User-defined array function: Easy solution for moulds deviation. Support user-defined 3D array.
Group function: This function allows users copy, delete, modify, array, and pan multi-points.
Excellent teaching pendant. Supporting advanced function, such as array, group edit, sub-procedure,
condition-call procedure etc.
Unique merge function: Easy resolution to process complex multi-layers irregular array and non-array
graphics.
Smooth functions of changing speed and hi-speed trajectory on the moving. User-definable speed parameters.
Multiple processing modes, such as single-step operation, overall processing, and automatic loop processing.