xp243 系统手册.pdf - 第220页
4. 机器生产程序 SYS-XP243-2.2S 208 XP-242E/243E 系统手册 多点输入的坐标计算方法 使用多点输入后,可以计算出比 相机的视野更大的远见的 X 坐标、Y 坐标和角度。 蓝色:以低速将 Y 轴向正向移动。 绿 色 : 以 移 动 量 为0 . 0 1 m m将Y轴 向 正向移动。 蓝色:以低速将 Y 轴向负向移动。 绿 色 : 以 移 动 量 为0 . 0 1 m m将Y轴 向 负向移动。 蓝色:以中速将 …
SYS-XP243-2.2S 4. 机器生产程序
XP-242E/243E 系统手册 207
设定 X,Y 轴的 JOG 操作模式。更改设定后,箭头颜色和 JOG 操作模
式也变更。
在移动量 ( 兰色 ) 时,每按一次下面的按键就以此移动量进行移
动。
在速度 ( 绿色 ) 时,在按下面的箭头键的期间,将以此速度移动。
不注册任何数据结束指教操作。
蓝色:以高速将 X 轴向正向移动。
绿色:以移动量为 1mm 将 X 轴向正向移动。
蓝色:以中速将 X 轴向正向移动。
绿色:以移动量为0.1mm将X轴向正向移动。
蓝色:以低速将 X 轴向正向移动。
绿色:以移动量为 0.01mm 将 X 轴向正向移动。
蓝色:以低速将 X 轴向负向移动。
绿色:以移动量为 0.01mm 将 X 轴向负向移动。
蓝色:以中速将 X 轴向负向移动。
绿色:以移动量为0.1mm将X轴向负向移动。
蓝色:以高速将 X 轴向负向移动。
绿色:以移动量为 1mm 将 X 轴向负向移动。
蓝色:以高速将 Y 轴向正向移动。
绿色:以移动量为 1mm 将 Y 轴向正向移动。
蓝色:以中速将 Y 轴向正向移动。
绿色:以移动量为0.1mm将Y轴向正向移动
4. 机器生产程序 SYS-XP243-2.2S
208 XP-242E/243E 系统手册
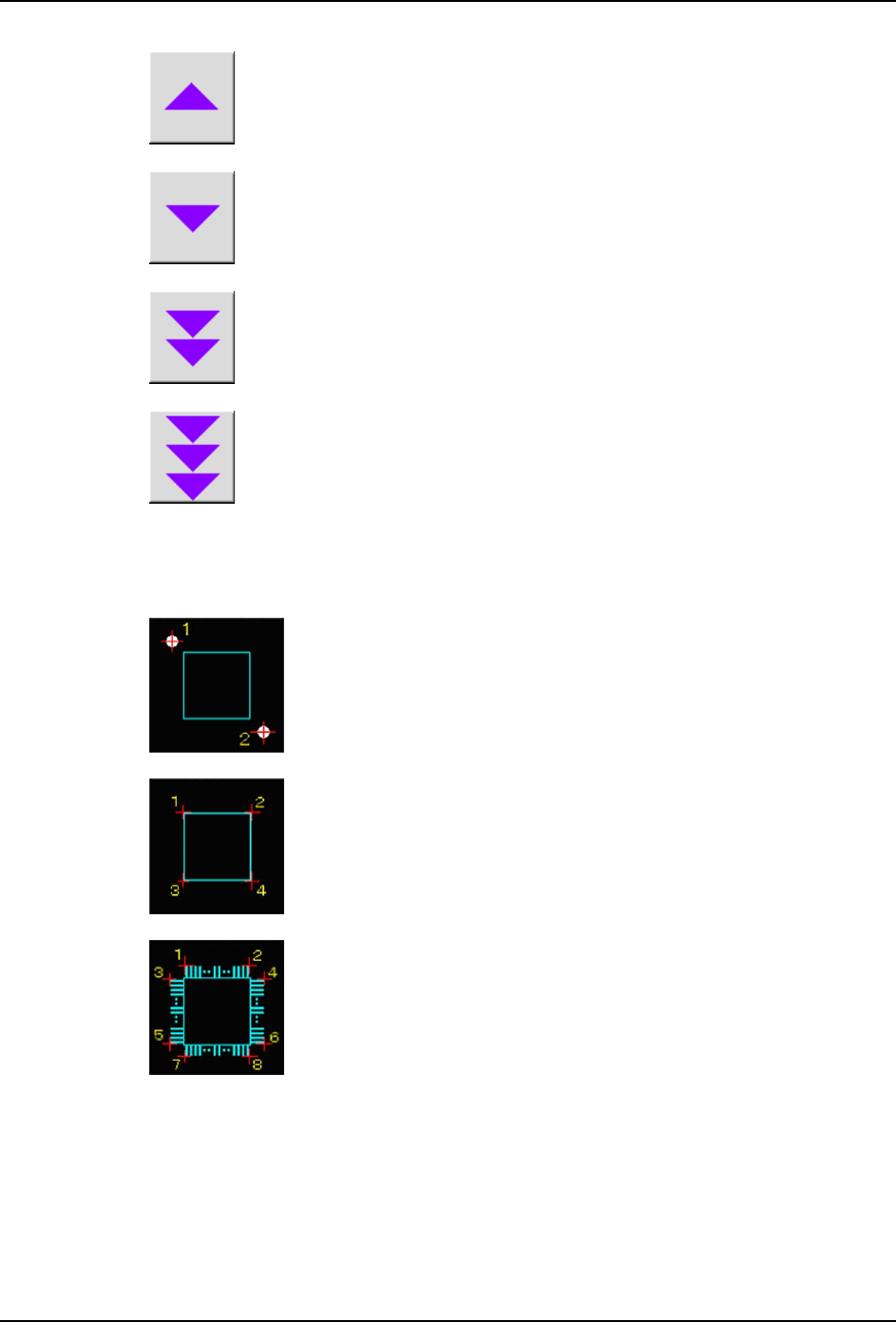
多点输入的坐标计算方法
使用多点输入后,可以计算出比相机的视野更大的远见的 X 坐标、Y 坐标和角度。
蓝色:以低速将 Y 轴向正向移动。
绿色:以移动量为0.01mm将Y轴向正向移动。
蓝色:以低速将 Y 轴向负向移动。
绿色:以移动量为0.01mm将Y轴向负向移动。
蓝色:以中速将 Y 轴向负向移动。
绿色:以移动量为0.1mm将Y轴向负向移动。
蓝色:以高速将 Y 轴向负向移动。
绿色:以移动量为 1mm 将 Y 轴向负向移动。
2 点输入
X、Y 坐标是 1,2 的平均值,角度是 0°。
4 点输入
X、Y坐标分别是1到4的平均值,角度是1→2,3→4倾斜度的
平均值。
8 点输入
X、Y坐标分别是1到8的平均值,角度是1→2,3→4,5→6,
7 → 8 倾斜度的平均值。
SYS-XP243-2.2S 4. 机器生产程序
XP-242E/243E 系统手册 209
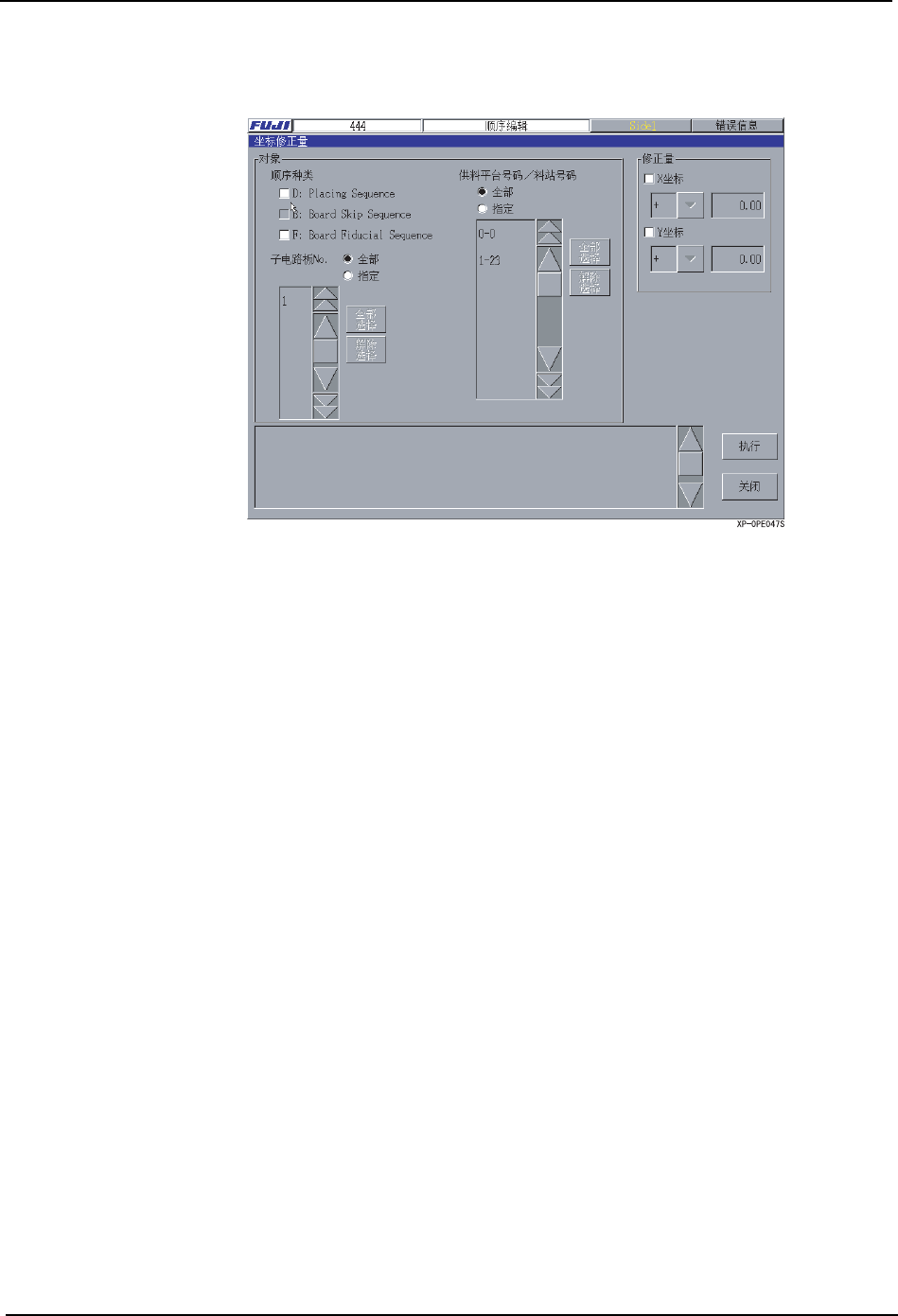
坐标修正量
以子电路板为单位对其子电路板上的指定种类的坐标进行修正的功能。
项目说明
子电路板 No.
指定对坐标进行修正的子电路板 No.。
平台 No./ 料站 No.
指定对坐标进行修正的平台 No./ 料站 No.。
顺序种类
选择适用修正值的坐标的种类。
修正量
指定进行修正的方向,加/减(+/-)量。(输入范围:0.00 ~ 650.00)
全部 : 对于电路板上的所有子电路板进行坐标修正。
指定 : 全部的子电路板不作为对象时,指定子电路板 No.。
全部 : 对于电路板上的所有的顺序进行坐标修正。
指定 : 全部的供料器不作为对象时,指定平台 No./ 料站 No.。
D: 元件贴装坐标
B: 读取子电路板跳过定位点坐标
F: 读取子电路板基准定位点坐标