JX-100_SPE_JP.pdf - 第34页
30 8-2-2 入力及び 出力信号イ ン タ ー フ ェ ー ス +24V リレー接点 +24V リレー接点 マウンタ 下流側装置 ピン番号:1 搬出要求入力信号 ピン番号:2 搬出要求信号コモン ピン番号:3 搬出許可出力信号 ピン番号:4 搬出許可信号コモン 上流側装置 ピン番号:1 搬出要求出力信号 ピン番号:2 搬出要求信号コモン ピン番号:3 搬出許可入力信号 ピン番号:4 搬出許可信号コモン 図 14 信号イ ン タ ーフ…
29
8. インターフェース
8-1 機械的インターフェース
基板搬送高さ
標準 900mm±20mm 、 オプション 950mm±20mm
EN仕様は、950mmのみ
8-2 電気的インターフェース
8-2-1 電気信号の種類と意味
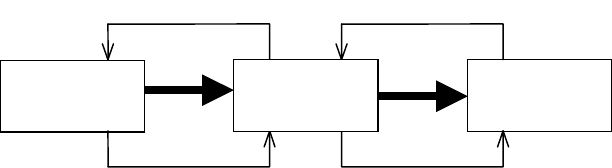
マウンタと相手側機械に関わる電気信号の接続概念図を「図11 電気信号の接続概念図」に
示します。図中で、マウンタと上流装置との間①②、及び下流装置との間③④の電気信号を以
下に示します。
a) 電気信号①は搬出要求入力信号(または、ボードアベイラブルイン)と呼び、上流側装
置からプリント基板の搬出要求を受ける信号。
b) 電気信号②は搬出許可出力信号(または、レディーアウト)と呼び、上流側装置に対し
プリント基板を搬出させる信号。
c) 電気信号③は搬出要求出力信号(または、ボードアベイラブルアウト)と呼び、下流側
装置に対しプリント基板の搬出を要求する信号。
d) 電気信号④は搬出許可入力信号(または、レディーイン)と呼び、下流側装置からプリント
基板の搬出許可を受ける信号。
下流側装置
③①
②
④
本装置
上流側装置
図13 電気信号の接続概念図
30
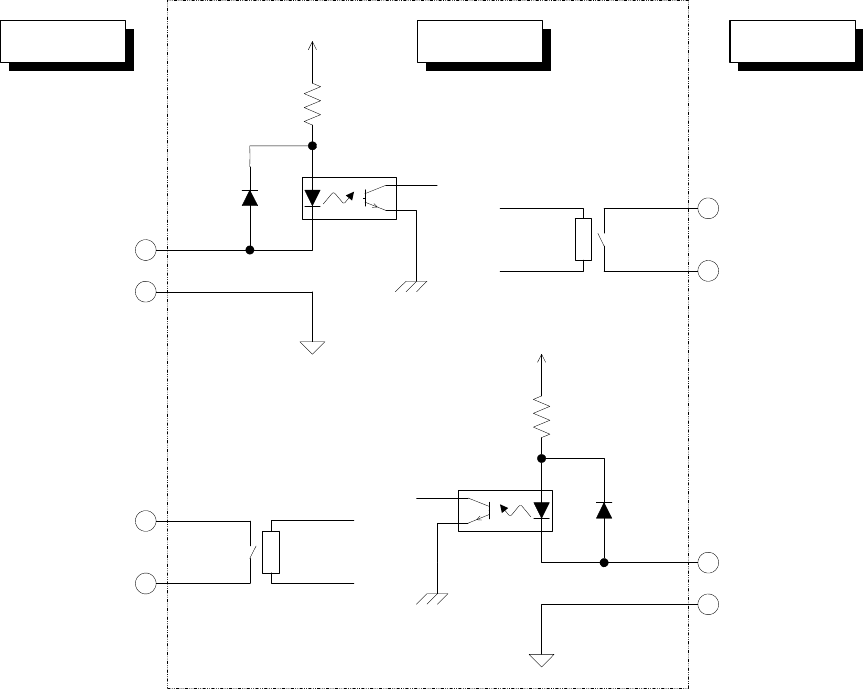
8-2-2 入力及び出力信号インターフェース
+24V
リレー接点
+24V
リレー接点
マウンタ下流側装置
ピン番号:1
搬出要求入力信号
ピン番号:2
搬出要求信号コモン
ピン番号:3
搬出許可出力信号
ピン番号:4
搬出許可信号コモン
上流側装置
ピン番号:1
搬出要求出力信号
ピン番号:2
搬出要求信号コモン
ピン番号:3
搬出許可入力信号
ピン番号:4
搬出許可信号コモン
図14 信号インターフェースと接続ターミナル
8-2-3 接続ケーブル仕様
JIS B 8438 産業用ロボット-電気装置に準拠。ケーブル長10m以内。
8-3 データインターフェース
USB 2.0相当 2ポート
データのインターフェースとしてFDD、DVD-ROM等を接続します。(USB接続、オプション)
8-4 ユーティリティの接続
配管継手
φ8×φ12ホース用ワンタッチ型配管継手プラグ
31
9. 安全性仕様
9-1 非常停止
フロント部の非常停止ボタンによる。(但し、オプションでリアバンクを選定した場合はリアにも非常
停止ボタンがつきます。) 非常停止スイッチ押下により、各軸は即時停止し、サーボモータの駆動
電源は遮断(サーボフリー)されます。
9-2 安全カバー
機械の前部にカバーを備え、カバーオープンスイッチにより、開閉状態を検知し、カバーを開けた場
合はサーボフリー状態となり即停止します。開放のままでのスタートはできません。
EN機ではオペレーションパネル上に「メンテナンスモード」「オペレーションモード」を切り替える「切り
替えキー」を設け、各モードに応じた安全カバーの開閉動作を切り替えます。
・オペレーションモード
通常時、生産時のカバーオープンを制御します。カバーを開けた場合はサーボフリー状態となり
ます。
・メンテナンスモード
カバーオープン状態での低速動作を可能とします。メンテナンスを行う際に使用するモードです。
9-3 CEマーキング仕様(EN機に適用)
以下のEC指令(European Committee)指令に準じています。
・EC 機械指令 2006/42/EC
・EC EMC指令 2004/108/EC
適合規格
・機械指令
EN ISO12100:2010,
EN ISO14121-1:2007, EN ISO13849-1:2008, EN60204-1:2006+A1:2009
・ EMC指令
EN61000-6-4:2007, EN55016-1-2:2004, EN55016-2-1:2004,EN55016-2-3:2004,
EN61000-6-2-1:2005, EN61000-4-2-1:2009, EN61000-4-3:2006/A1:2008,
EN61000-4-4:2004, EN61000-4-5:2006, EN61000-4-6:2009,
EN61000-4-8:1993/A1:2001, EN61000-4-11:2004