JX-100_SPE_JP.pdf - 第35页
31 9. 安全性仕様 9-1 非常停止 フ ロ ン ト 部の 非常停 止ボ タ ンに よ る 。 ( 但し 、 オプ シ ョン で リア バ ン ク を 選定し た 場合は リ ア に も 非常 停止ボ タ ン が つ き ま す。 ) 非常停止ス イ ッ チ 押下に よ り 、 各軸は 即時停止し 、 サ ー ボ モ ー タ の 駆動 電源は 遮断 ( サーボフリー ) されます。 9-2 安全カ バ ー 機械の 前部に カ…
30
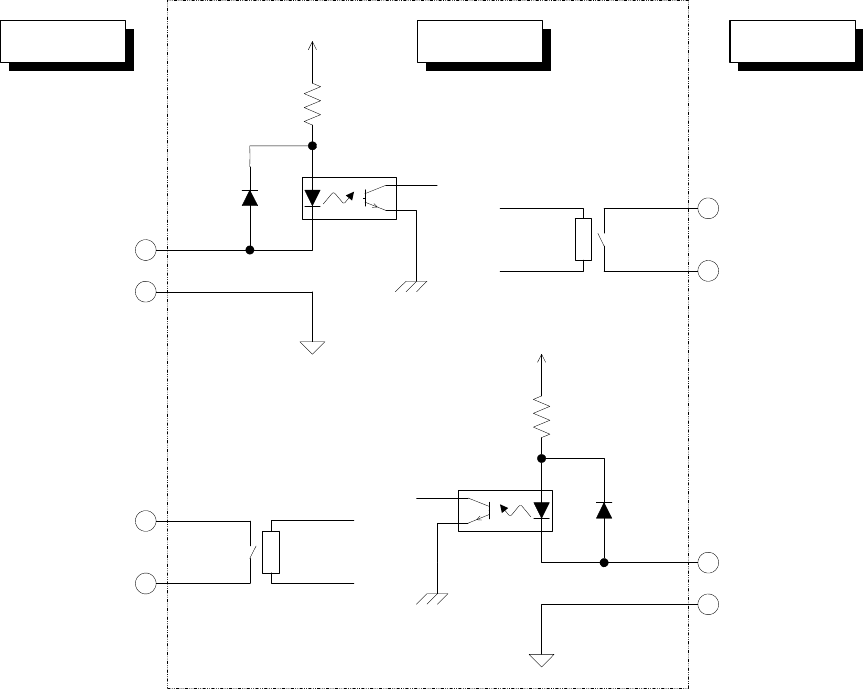
8-2-2 入力及び出力信号インターフェース
+24V
リレー接点
+24V
リレー接点
マウンタ下流側装置
ピン番号:1
搬出要求入力信号
ピン番号:2
搬出要求信号コモン
ピン番号:3
搬出許可出力信号
ピン番号:4
搬出許可信号コモン
上流側装置
ピン番号:1
搬出要求出力信号
ピン番号:2
搬出要求信号コモン
ピン番号:3
搬出許可入力信号
ピン番号:4
搬出許可信号コモン
図14 信号インターフェースと接続ターミナル
8-2-3 接続ケーブル仕様
JIS B 8438 産業用ロボット-電気装置に準拠。ケーブル長10m以内。
8-3 データインターフェース
USB 2.0相当 2ポート
データのインターフェースとしてFDD、DVD-ROM等を接続します。(USB接続、オプション)
8-4 ユーティリティの接続
配管継手
φ8×φ12ホース用ワンタッチ型配管継手プラグ
31
9. 安全性仕様
9-1 非常停止
フロント部の非常停止ボタンによる。(但し、オプションでリアバンクを選定した場合はリアにも非常
停止ボタンがつきます。) 非常停止スイッチ押下により、各軸は即時停止し、サーボモータの駆動
電源は遮断(サーボフリー)されます。
9-2 安全カバー
機械の前部にカバーを備え、カバーオープンスイッチにより、開閉状態を検知し、カバーを開けた場
合はサーボフリー状態となり即停止します。開放のままでのスタートはできません。
EN機ではオペレーションパネル上に「メンテナンスモード」「オペレーションモード」を切り替える「切り
替えキー」を設け、各モードに応じた安全カバーの開閉動作を切り替えます。
・オペレーションモード
通常時、生産時のカバーオープンを制御します。カバーを開けた場合はサーボフリー状態となり
ます。
・メンテナンスモード
カバーオープン状態での低速動作を可能とします。メンテナンスを行う際に使用するモードです。
9-3 CEマーキング仕様(EN機に適用)
以下のEC指令(European Committee)指令に準じています。
・EC 機械指令 2006/42/EC
・EC EMC指令 2004/108/EC
適合規格
・機械指令
EN ISO12100:2010,
EN ISO14121-1:2007, EN ISO13849-1:2008, EN60204-1:2006+A1:2009
・ EMC指令
EN61000-6-4:2007, EN55016-1-2:2004, EN55016-2-1:2004,EN55016-2-3:2004,
EN61000-6-2-1:2005, EN61000-4-2-1:2009, EN61000-4-3:2006/A1:2008,
EN61000-4-4:2004, EN61000-4-5:2006, EN61000-4-6:2009,
EN61000-4-8:1993/A1:2001, EN61000-4-11:2004
32
10. 保守性仕様
10-1 トラブルシューティング
ヘルプ機能の充実により、異常状態の原因を見つけ出し、正常な状態にするための解決方法
を探します。
10-2 キャリブレーション機能
真空圧破壊タイミングの経時変化を自己補正し、既定値以上に達した際、清掃の警告表示
をします。
10-3 MTBA表示機能
生産中に発生したチョコ停から次回のチョコ停となるまでの平均間隔時間(MTBA)を算出し表
示します。
11. 信頼性仕様
11-1 装置寿命
5年 :但し、消耗部品または下記の部品を除きます。(詳細は取扱説明書を参照願います。)
• プラレール
• ベアケーブル組
• センサ
• カメラ
• 電磁弁
• エアシリンダ
• コンベアベルト
• 1394 ロボットケーブル組
• LCDディスプレイ
• ガススプリング
• フィルタエレメント
• エジェクタ
• SSD
• HOD組
• オプティカル ファイバーケーブル組
寿命算定基準:
22時間/日
300日/年
22×300×5=33,000時間/5年