20201215095225.pdf - 第11页
* 1: F= 置地式, W= 壁挂式, C= 倒挂式, S= 置架式, T= 倾斜式 (请注意壁挂式、 倾斜式时 S 轴的动作会有限制。 ) * 2: ISO 9283 为基准。 * 3: YRC1000,YRC1000micro 对应机型记载的是自轴的动作范围而不是对地基准。 (平行关节型的机型除外) * 4: 因用途, 动作模式而异。 用途 搬运 (通用用途) 机器人型号 MOTOMAN- GP280L GP360 GP400 G…
*1: F= 置地式,W= 壁挂式,C= 倒挂式,S= 置架式,T= 倾斜式(请注意壁挂式、倾斜式时S轴的动作会有限制。)
*2: ISO 9283 为基准。
*3: YRC1000,YRC1000micro 对应机型记载的是自轴的动作范围而不是对地基准。(平行关节型的机型除外)
*4: 因用途,动作模式而异。
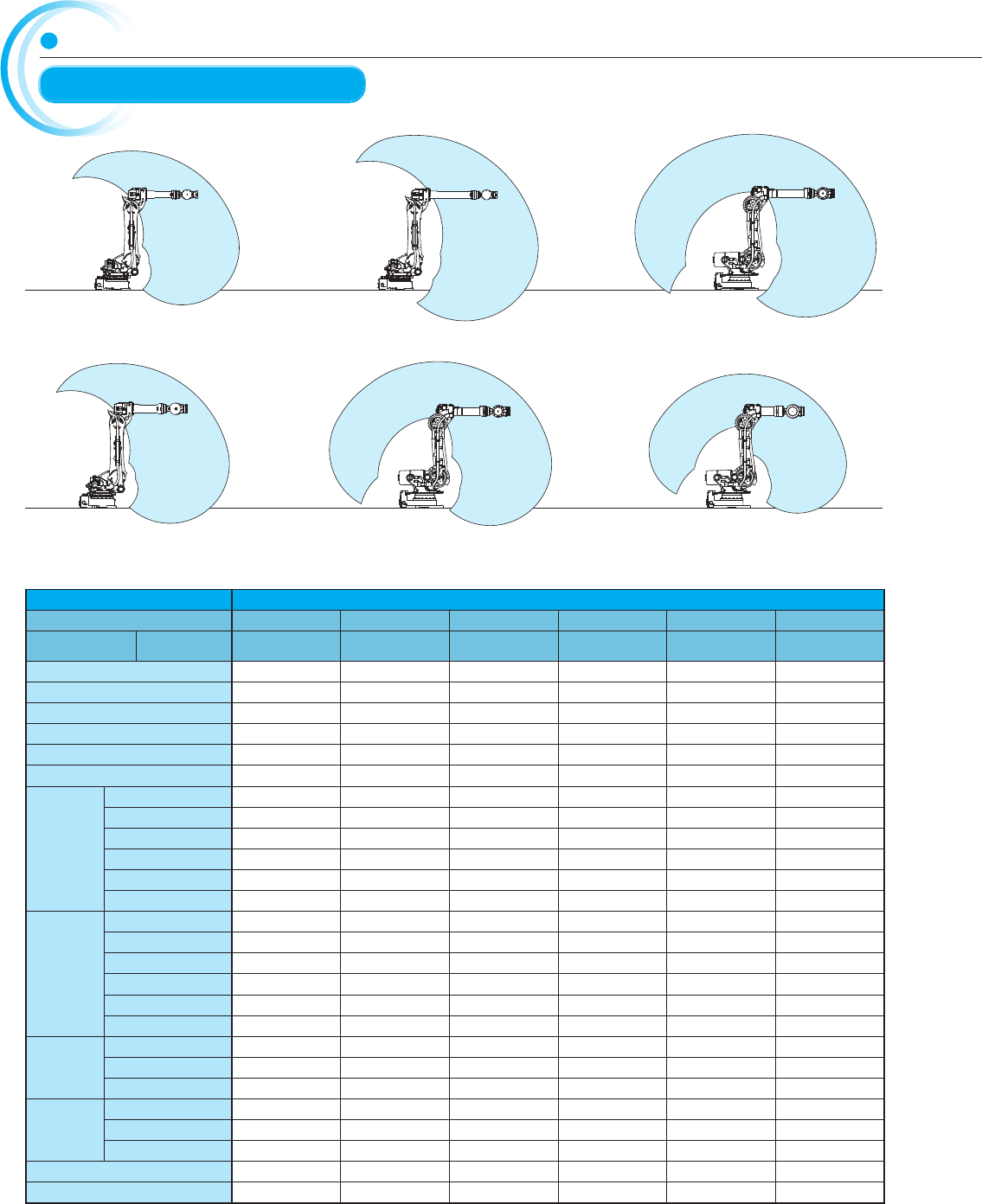
用途 搬运(通用用途)
机器人型号
MOTOMAN- GP180 GP180-120 GP215 GP225 GP250 GP280
适用
控制柜
YRC1000
○ ○ ○ ○ ○ ○
设置
*
1
F F F F F F
自由度
6 6 6 6 6 6
负载
180kg 120kg 215kg 225kg 250kg 280kg
垂直伸长度
3393mm 4105mm 3894mm 3393mm 3490mm 2962mm
水平伸长度
2702mm 3058mm 2912mm 2702mm 2710mm 2446mm
重复定位精度
*
2
0.05 mm 0.05 mm 0.05mm 0.05mm 0.05mm 0.05mm
动作范围
S
轴
(
旋转
)
-180° - +180° -180° - +180° -180° - +180° -180° - +180° -180° - +180° -180° - +180°
L
轴
(
下臂
)
-60° - +76° -60° - +76° -60° - +76° -60° - +76° -60° - +76° -60° - +76°
U
轴
(
上腕
)
*
3
-86° - +90° -86° - +90° -77.8° - +197° -86° - +90° -77.8° - +197° -77.8° - +197°
R
轴
(
手腕旋转
)
-360° - +360° -360° - +360° -360° - +360° -360° - +360° -360° - +360° -360° - +360°
B
轴
(
手腕摆动
)
-130° - +130° -130° - +130° -125° - +125° -125° - +125° -125° - +125° -125° - +125°
T
轴
(
手腕回转
)
-360° - +360° -360° - +360° -360° - +360° -360° - +360° -360° - +360° -360° - +360°
最大速度
S
轴
(
旋转
)
125°/s 125°/s 100°/s 120°/s 100°/s 90°/s
L
轴
(
下臂
)
115°/s 115°/s 90°/s 97°/s 90°/s 80°/s
U
轴
(
上腕
)
125°/s 125°/s 97°/s 115°°/s 97°°/s 90°°/s
R
轴
(
手腕旋转
)
182°/s 182°/s 120°°/s 145°/s 120°°/s 115°/s
B
轴
(
手腕摆动
)
175°/s 175°/s 120°/s 145°°/s 120°°/s 110°°/s
T
轴
(
手腕回转
)
265°/s 265°/s 190°°/s 220°/s 190°°/s 190°/s
容许力矩
R
轴
(
手腕旋转
)
1000N
・
m 883N
・
m 1176N
・
m 1372N
・
m 1385N
・
m 1333N
・
m
B
轴
(
手腕摆动
)
1000N
・
m 883N
・
m 1176N
・
m 1372N
・
m 1385N
・
m 1333N
・
m
T
轴
(
手腕回转
)
618N
・
m 520N
・
m 710N
・
m 735N
・
m 735N
・
m 706N
・
m
容许
惯性力矩
(GD
2
/4)
R
轴
(
手腕旋转
)
90kg
・
m
2
79kg
・
m
2
317kg
・
m
2
145kg
・
m
2
317kg
・
m
2
142kg
・
m
2
B
轴
(
手腕摆动
)
90kg
・
m
2
79kg
・
m
2
317kg
・
m
2
145kg
・
m
2
317kg
・
m
2
142kg
・
m
2
T
轴
(
手腕回转
)
46.3kg
・
m
2
40kg
・
m
2
200kg
・
m
2
84kg
・
m
2
200kg
・
m
2
79kg
・
m
2
本体质量
1020kg 1090kg 1340kg 1080kg 1345kg 1300kg
电源容量
*
4
5.0kVA 5.0kVA 5.0kVA 5.0kVA 5.0kVA 5.0kVA
MOTOMAN-GP280MOTOMAN-GP225 MOTOMAN-GP250
MOTOMAN-GP215MOTOMAN-GP180-120MOTOMAN-GP180
8
搬运(通用用途)
*1: F= 置地式,W= 壁挂式,C= 倒挂式,S= 置架式,T= 倾斜式(请注意壁挂式、倾斜式时S轴的动作会有限制。)
*2: ISO 9283 为基准。
*3: YRC1000,YRC1000micro 对应机型记载的是自轴的动作范围而不是对地基准。(平行关节型的机型除外)
*4: 因用途,动作模式而异。
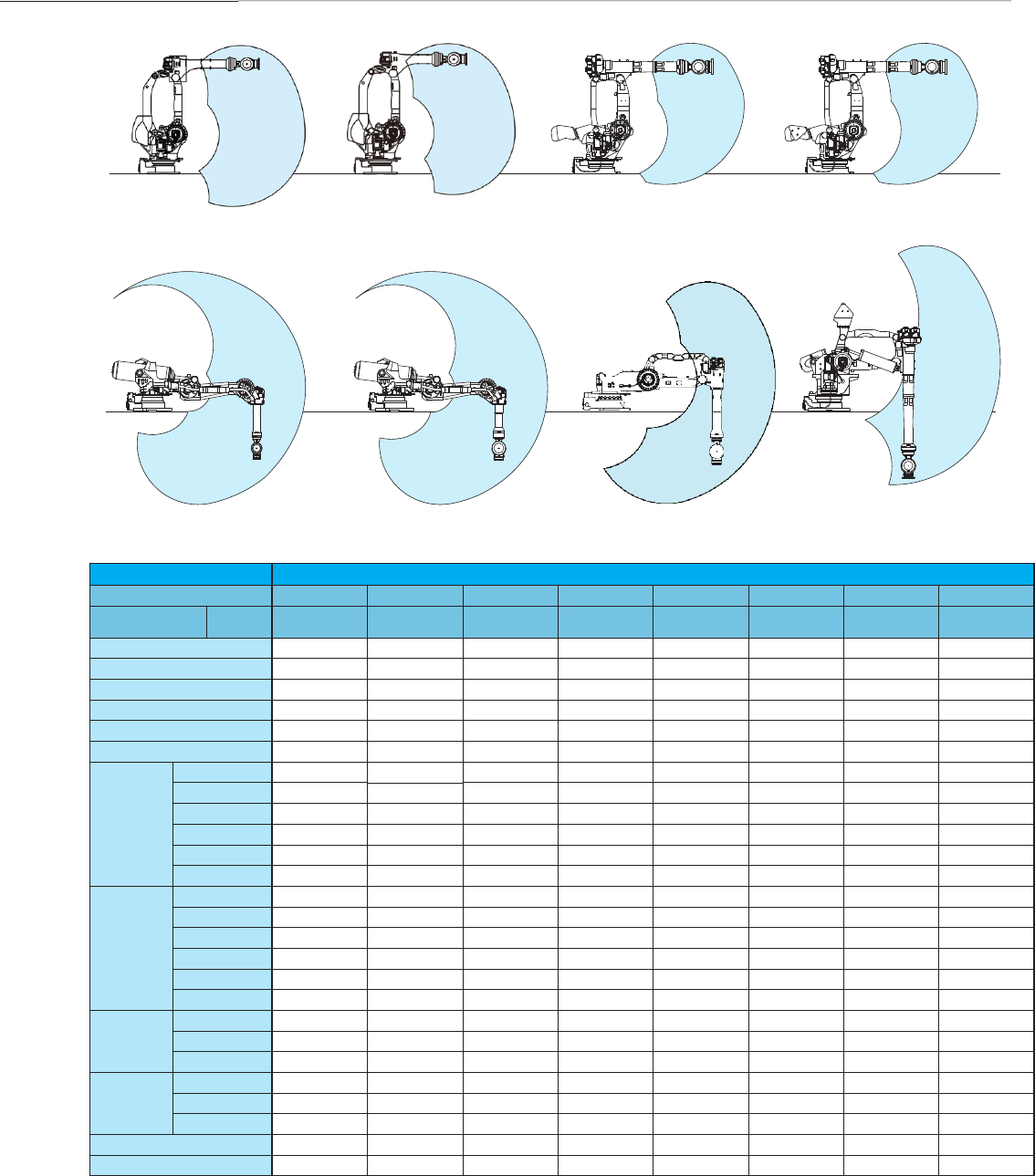
用途 搬运(通用用途)
机器人型号
MOTOMAN- GP280L GP360 GP400 GP600
GP165R GP200R GP300R GP400R
适用
控制柜
YRC1000
○ ○ ○ ○ ○ ○ ○ ○
设置
*
1
F F F F
S S S S
自由度
6 6 6 6
6 6 6 6
负载
280kg 360 kg 400kg 600kg
165kg 200kg 300kg 400kg
垂直伸长度
3552mm 3192mm 2898mm 2898mm
4782mm 4782mm 4309mm 4908mm
水平伸长度
3114mm 2832mm 2942mm 2942mm
3140mm 3140mm 3220mm 3518mm
重复定位精度
*
2
0.1mm 0.1 mm 0.1mm 0.1mm 0.05mm 0.05mm 0.05mm 0.1mm
动作范围
S
轴
(
旋转
)
-180° - +180° -
180°
-
+180°
-180° - +180° -180° - +180° -180° - +180° -180° - +180° -180° - +180° -150° - +150°
L
轴
(
下臂
)
-45° - +90° -
45°
-
+ 90°
-55° - +61° -55° - +61° -130° - +80° -130° - +80° -140° - + 70° -122° - +20°
U
轴
(
上腕
)
*
3
-120° - +15.5° -
120°
-
+15.5°
-113° - +18° -113° - +18° -79.4° - +78° -78.4° - +78° - 70° - +115° -9° - +120°
R
轴
(
手腕旋转
)
-360° - +360° -
360°
-
+360°
-360° - +360° -360° - +360° -360° - +360° -360° - +360° -360° - +360° -360° - +360°
B
轴
(
手腕摆动
)
-125° - +125° -
125°
-
+125°
-115° - +115° -115° - +115° -130° - +130° -125° - +125° -125° - +125° -120° - +120°
T
轴
(
手腕回转
)
-360° - +360° -
360°
-
+360°
-360° - +360° -360° - +360° -360° - +360° -360° - +360° -360° - +360° -360° - +360°
最大速度
S
轴
(
旋转
)
110°/s 110°/s 102°/s 82°/s 105°/s 90°/s 110°/s 80°/s
L
轴
(
下臂
)
90°/s 90°/s 97°/s 82°/s 105°/s 85°/s 95°/s 80°/s
U
轴
(
上腕
)
90°/s 90°/s 97°/s 82°°/s 105°/s 85°/s 95°/s 80°/s
R
轴
(
手腕旋转
)
125°/s 125°/s 80°/s 80°/s 175°/s 120°/s 120°/s 80°/s
B
轴
(
手腕摆动
)
125°°/s 125°/s 80°°/s 80°/s 150°/s 120°/s 120°/s 80°°/s
T
轴
(
手腕回转
)
205°°/s 205°/s 172°°/s 162°/s 240°/s 190°/s 190°/s 160°/s
容许力矩
R
轴
(
手腕旋转
)
1960N
・
m
1960 N
・
m
2989N
・
m 3430N
・
m 921N
・
m 1344N
・
m 1962N
・
m 1960N
・
m
B
轴
(
手腕摆动
)
1960N
・
m
1960 N
・
m
2989N
・
m 3430N
・
m 921N
・
m 1344N
・
m 1962N
・
m 1960N
・
m
T
轴
(
手腕回转
)
950N
・
m 950 N
・
m 1343N
・
m 1764N
・
m 490N
・
m 715N
・
m 834N
・
m 833N
・
m
容许
惯性力矩
(GD
2
/4)
R
轴
(
手腕旋转
)
220kg
・
m
2
260 kg
・
m
2
500kg
・
m
2
520kg
・
m
2
85kg
・
m
2
143kg
・
m
2
320kg
・
m
2
150kg
・
m
2
B
轴
(
手腕摆动
)
220kg
・
m
2
260 kg
・
m
2
500kg
・
m
2
520kg
・
m
2
85kg
・
m
2
143kg
・
m
2
320kg
・
m
2
150kg
・
m
2
T
轴
(
手腕回转
)
140kg
・
m
2
180 kg
・
m
2
315kg
・
m
2
350kg
・
m
2
45kg
・
m
2
80kg
・
m
2
200kg
・
m
2
50kg
・
m
2
本体质量
2380kg
2370 kg
2840kg 3035kg 1760kg 1830kg 1530kg 3560kg
电源容量
*
4
7.5kVA 7.5kVA 7.0kVA 7.0kVA
5.0kVA 5.0kVA 5.0kVA 7.0kVA
MOTOMAN-GP400
MOTOMAN-GP165R MOTOMAN-GP400RMOTOMAN-GP200R
MOTOMAN-GP600MOTOMAN-GP280L MOTOMAN-GP360
MOTOMAN-GP300R
9
搬运(通用用途)
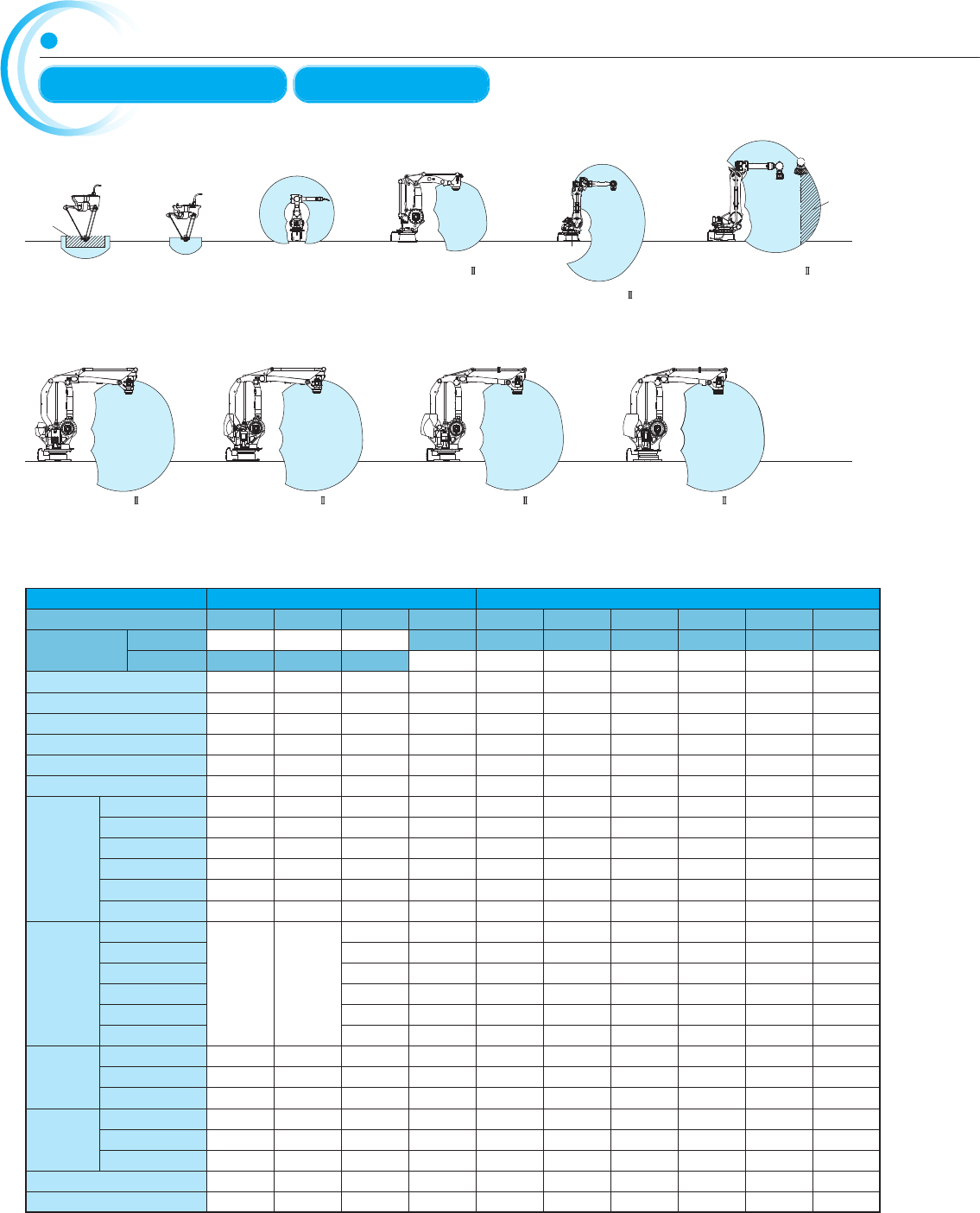
用途 取件
·
包装 码垛
机器人型号
MOTOMAN-
MPP3H MPP3S MPK2F MPK50
Ⅱ
MPL80
Ⅱ
MPL100
Ⅱ
MPL160
Ⅱ
MPL300
Ⅱ
MPL500
Ⅱ
MPL800
Ⅱ
适用
控制柜
DX200
○ ○ ○ ○ ○ ○ ○
FS100
○ ○ ○
设置
*
1
C C F,W,C F F F F F F F
自由度
4 4 5 4 5 5 4 4 4 4
负载
3kg 3kg 2kg 50kg 80kg 100kg
*
10
160kg 300kg 500kg 800kg
垂直伸长度
300mm 200mm 1625mm 1668mm 3291mm 3149mm 3024mm 3024mm 3024mm 3024mm
水平伸长度
φ1300
*
5
φ800 900mm 1893mm 2061mm 2150mm 3159mm 3159mm 3159mm 3159mm
重复定位精度
*
2
0.1mm 0.1mm 0.5mm 0.5mm 0.07mm 0.2mm 0.5mm 0.5mm 0.5mm 0.5mm
动作范围
S
轴
(
旋转
)
− −
-170° - +170° -180° - +180° -180° - +180° -180° - +180° -180° - +180° -180° - +180° -180° - +180° -180° - +180°
L
轴
(
下臂
)
− −
-120° - +120° -35° - +80° -90° - +135° -60° - +76° -45° - +90° -45° - +90° -45° - +90° -45° - +90°
U
轴
(
上腕
)
*
3
− −
-102° - +282° -105° - +15° -160° - +35° -147° - +40° -120° - +15.5° -120° - +15.5° -120° - +15.5° -120° - +15.5°
R
轴
(
手腕旋转
)
− − − − − − − − − −
B
轴
(
手腕摆动
)
− −
-150° - +150°
−
-15° - +15°
*
9
-15° - +15°
*
9
− − − −
T
轴
(
手腕回转
)
-360° - +360° -360° - +360° -270° - +270° -350° - +350° -360° - +360°
-210° - +210°
*
10
-360° - +360° -360° - +360° -360° - +360° -360° - +360°
最大速度
S
轴
(
旋转
)
循环时间
(25-305-25)
1kg : 230cpm
*
6
3kg : 150cpm
循环时间
(25-305-25)
1kg : 230cpm
*
6
3kg : 150cpm
320°/s 185°/s 170°/s 125°/s 140°/s 90°/s 85°/s 65°/s
L
轴
(
下臂
)
330°/s 215°/s 170°/s 88°/s 140°/s 100°/s 85°/s 65°/s
U
轴
(
上腕
)
330°/s 215°/s 170°/s 125°/s 140°/s 110°/s 85°/s 65°/s
R
轴
(
手腕旋转
)
− − − − − − − −
B
轴
(
手腕摆动
)
380°/s − 170°/s 175°/s − − − −
T
轴
(
手腕回转
)
2000°/s 374°/s 350°/s 265°/s 305°/s 195°/s 195°/s 125°/s
容许力矩
R
轴
(
手腕旋转
)
− − − − − − − − − −
B
轴
(
手腕摆动
)
− − 3.5N
・
m − 78.4N
・
m 196N
・
m − − − −
T
轴
(
手腕回转
)
− − 1.5N
・
m − 20.5N
・
m 0N
・
m − − − −
容许
惯性力矩
(GD
2
/4)
R
轴
(
手腕旋转
)
− − − − − − − − − −
B
轴
(
手腕摆动
)
− −
0.065kg
・
m
2
− 16kg
・
m
2
88kg
・
m
2
*
10
− − − −
T
轴
(
手腕回转
)
*
7
*
8
0.012kg
・
m
2
5.5kg
・
m
2
6.1kg
・
m
2
55kg
・
m
2
80kg
・
m
2
140kg
・
m
2
200kg
・
m
2
550kg
・
m
2
本体质量
115kg 95kg 72kg 670kg 550kg 950kg 1700kg 1820kg 2300kg 2550kg
电源容量
*
4
1.5kVA 1.5kVA 2.0kVA 4.0kVA 4.0kVA 8.0kVA 8.0kVA 8.0kVA 8.0kVA 8.0kVA
*1: F= 置地式,W= 壁挂式,C= 倒挂式,S= 置架式,T= 倾斜式(请注意壁挂式、倾斜式时S
轴的动作会有限制。)
*2: ISO 9283 为基准。
*3: YRC1000,YRC1000micro 对应机型记载的是自轴的动作范围而不是对地基准。(平行关
节型的机型除外)
*4: 因用途,动作模式而异。
*5: 推荐动作范围为斜线部(φ1040×H300mm)。超出推荐动作范围时动作可能会有震动
*6: 连续动作有限制。(无连续限制 : 185 cpm 以下 )
*7: T 轴的容许惯性力矩如下所示 :
1kg: 0.0013kg/m
2
以下 , 2kg: 0.009kg/m
2
以下 , 3kg: 0.017kg/m
2
以下。
*8: T 轴的容许惯性力矩如下所示 :
1kg: 0.0013kg/m
2
以下 , 3kg: 0.017kg/m
2
以下。
*9: B 轴动作范围为对地角度。 但因与上臂的相对角,故有被限制的姿势。
*10: 手腕前端安装安川标准的电缆处理用法兰盘的值。
*11: 斜线部动作范围在负载 70kg(包含电缆处理用法兰盘)以下时有效。
*
11
*
5
MOTOMAN-MPK2FMOTOMAN-MPP3SMOTOMAN-MPP3H MOTOMAN-MPK50
MOTOMAN-MPL80
MOTOMAN-MPL160 MOTOMAN-MPL300 MOTOMAN-MPL500 MOTOMAN-MPL800
MOTOMAN-MPL100
10
取件·包装 码垛
组装·分装