20201215095225.pdf - 第7页
用途 搬运 (通用用途) 机器人型号 MotoMINI MOTOMAN- MOTOMAN- HC10DT HC20DT 适用 控制柜 YRC1000micro ○ ○ ○ YRC1000 ○ ○ 设置 * 1 F ,W ,C,T F ,W ,C,T F ,W,C,T 自由度 6 6 6 负载 0.5kg (Max.1kg * 5 ) 10 kg 20kg 垂直伸长度 495mm 2400mm 3400mm 水平伸长度 350mm 120…
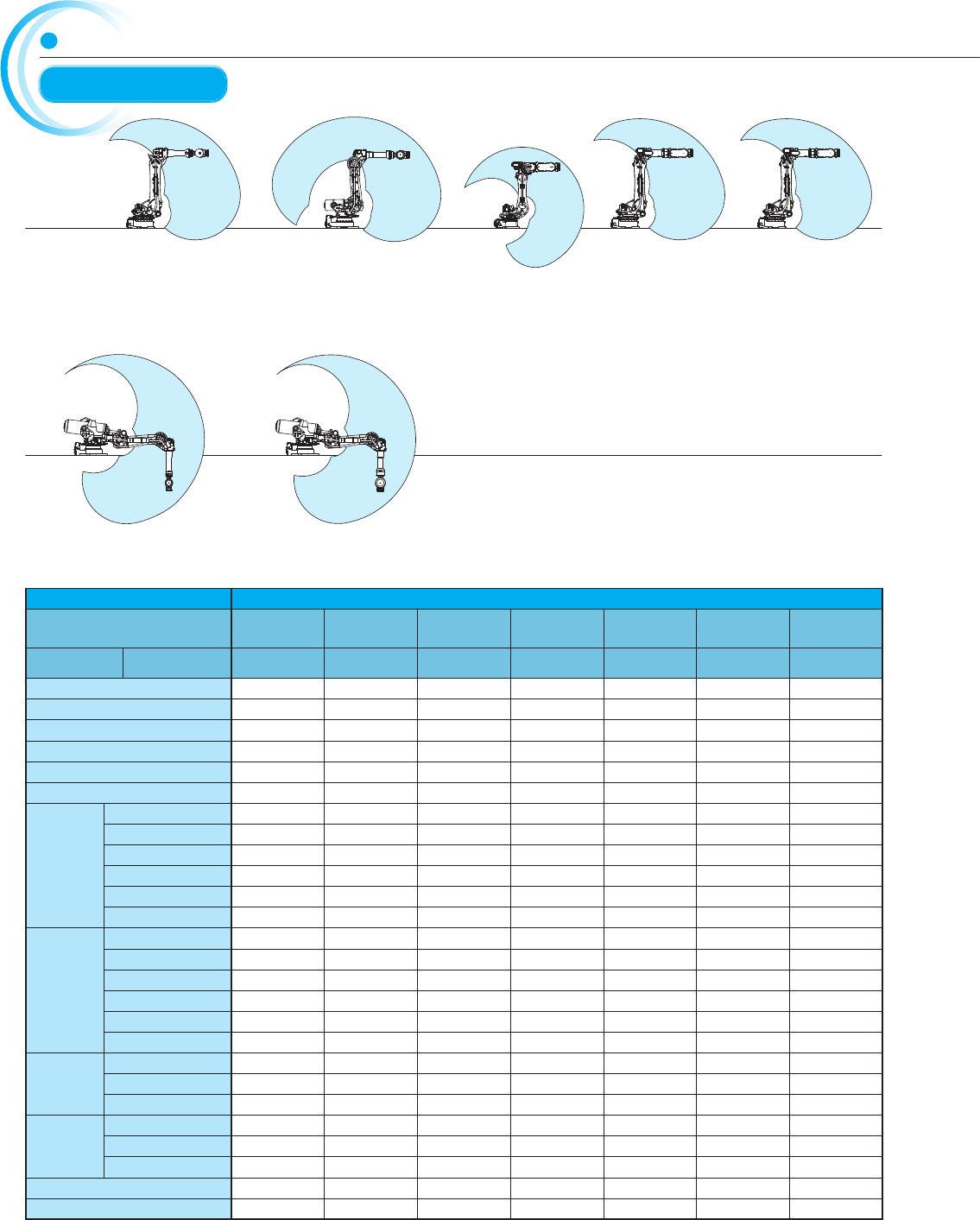
用途 点焊
机器人型号
MOTOMAN- SP210 SP235
SP110H
(中空手臂)
SP180H
(中空手臂)
SP225H
(中空手臂)
SP150R SP185R
适用
控制柜
YRC1000
○ ○ ○ ○ ○ ○ ○
设置
*
1
F F F F F S S
自由度
6 6 6 6 6 6 6
负载
210kg
*
5
235kg
*
5
110kg 180kg 225kg 150kg
*
5
185kg
*
5
垂直伸长度
3393mm 3490mm 3367mm 3393mm 3393mm 4782mm 4782mm
水平伸长度
2702mm 2710mm 2044mm 2702mm 2702mm 3140mm 3140mm
重复定位精度
*
2
0.05mm 0.05mm 0.05mm 0.05mm 0.05mm 0.05mm 0.05mm
动作范围
S
轴
(
旋转
)
-180° - +180° -180° - +180° -180° - +180° -180° - +180° -180° - +180° -180° - +180° -180° - +180°
L
轴
(
下臂
)
-60° - +76° -60° - +76° -90° - +155° -60° - +76° -60° - +76° -130° - +80° -130° - +80°
U
轴
(
上腕
)
*
3
-86° - +90° -77.8° - +197° -86° - +90° -86° - +90° -86° - +90° -79.4° - +78° -78.4° - +78°
R
轴
(
手腕旋转
)
-210° - +210°
*
5
-205° - +205°
*
5
-210° - +210° -210° - +210° -210° - +210°
-205° - +205°
*
5
-205° - +205°
*
5
B
轴
(
手腕摆动
)
-125° - +125°
-120° - +120°
*
5
-130° - +130° -130° - +130° -130° - +130°
-120° - +120°
*
5
-120° - +120°
*
5
T
轴
(
手腕回转
)
-210° - +210°
*
5
-180° - +180°
*
5
-360° - +360°
*
6
-360° - +360°
*
6
-360° - +360°
*
6
-180° - +180°
*
5
-180° - +180°
*
5
最大速度
S
轴
(
旋转
)
120°/s 100°/s 140°/s 120°/s 120°/s 105°/s 90°/s
L
轴
(
下臂
)
97°/s 90°/s 115°/s 97°/s 97°/s 105°/s 85°/s
U
轴
(
上腕
)
115°/s 97°/s 161°/s 115°/s 115°/s 105°/s 85°/s
R
轴
(
手腕旋转
)
145°/s 120°/s 225°/s 150°/s 150°/s 175°/s 120°/s
B
轴
(
手腕摆动
)
145°/s 120°/s 200°/s 150°/s 150°/s 150°/s 120°/s
T
轴
(
手腕回转
)
220°/s 190°/s 315°/s 230°/s 230°/s 240°/s 190°/s
容许力矩
R
轴
(
手腕旋转
)
1323N
・
m
*
5
1333N
・
m
*
5
721N
・
m 1000N
・
m 1372N
・
m 868N
・
m
*
5
1291N
・
m
*
5
B
轴
(
手腕摆动
)
1323N
・
m
*
5
1333N
・
m
*
5
721N
・
m 1000N
・
m 1372N
・
m 868N
・
m
*
5
1291N
・
m
*
5
T
轴
(
手腕回转
)
735N
・
m 735N
・
m 315N
・
m 618N
・
m 735N
・
m 490N
・
m 715N
・
m
容许
惯性力矩
(GD
2
/4)
R
轴
(
手腕旋转
)
143kg
・
m
2
*
5
315kg
・
m
2
*
5
85kg
・
m
2
104kg
・
m
2
209.8kg
・
m
2
83kg
・
m
2
*
5
141kg
・
m
2
*
5
B
轴
(
手腕摆动
)
143kg
・
m
2
*
5
315kg
・
m
2
*
5
85kg
・
m
2
104kg
・
m
2
209.8kg
・
m
2
83kg
・
m
2
*
5
141kg
・
m
2
*
5
T
轴
(
手腕回转
)
84kg
・
m
2
200kg
・
m
2
45kg
・
m
2
52kg
・
m
2
162.1kg
・
m
2
45kg
・
m
2
80kg
・
m
2
本体质量
1080kg 1345kg 730kg 1090kg 1090kg 1760kg 1830kg
电源容量
*
4
5.0kVA 5.0kVA 5.0kVA 5.0kVA 5.0kVA 5.0kVA 5.0kVA
*1: F= 置地式,W= 壁挂式,C= 倒挂式,S= 置架式,T= 倾斜式(请注意壁挂式、倾斜式时S轴的动作会有限制。)
*2: ISO 9283 为基准。
*3: YRC1000,YRC1000micro 对应机型记载的是自轴的动作范围而不是对地基准。(平行关节型的机型除外)
*4: 因用途,动作模式而异。
*5: 记载的是手腕前端安装有安川电机标准的电缆处理用法兰盘时的值。
*6: 安装有安川电机标准的管线包时,动作范围有限制。
MOTOMAN-SP150R
MOTOMAN-SP210 MOTOMAN-SP235 MOTOMAN-SP110H MOTOMAN-SP225HMOTOMAN-SP180H
MOTOMAN-SP185R
4
搬运(通用用途)
点焊
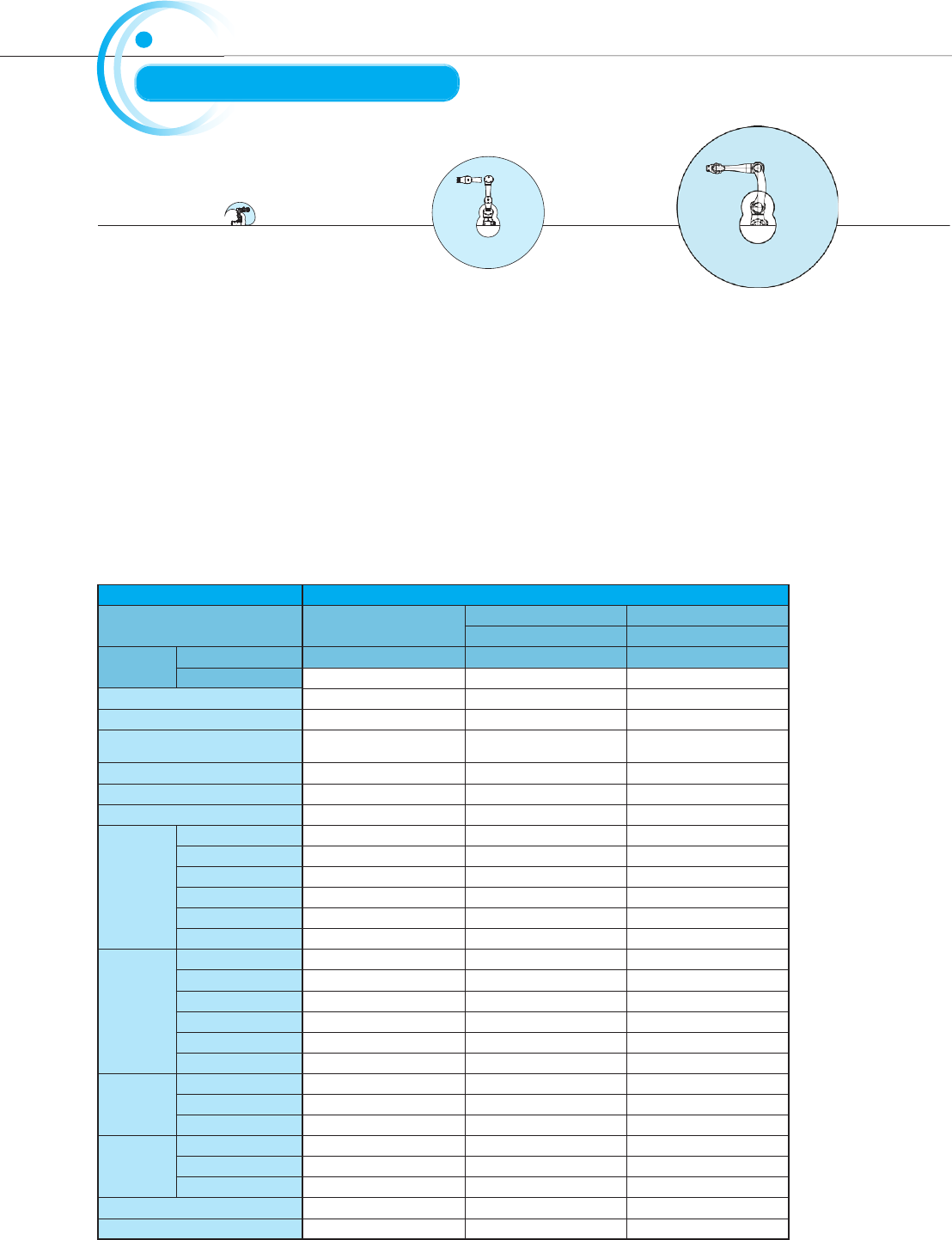
用途 搬运(通用用途)
机器人型号
MotoMINI
MOTOMAN- MOTOMAN-
HC10DT HC20DT
适用
控制柜
YRC1000micro
○ ○ ○
YRC1000
○ ○
设置
*
1
F,W,C,T F,W,C,T F,W,C,T
自由度
6 6 6
负载
0.5kg
(Max.1kg
*
5
)
10kg 20kg
垂直伸长度
495mm 2400mm 3400mm
水平伸长度
350mm 1200mm 1700mm
重复定位精度
*
2
0.02mm 0.05mm 0.05mm
动作范围
S
轴
(
旋转
)
-170° - +170° -180° - +180° -180° - +180°
L
轴
(
下臂
)
-85
°
-
+90
°
-180° - +180° -180° - +180°
U
轴
(
上腕
)
*
3
-50
°
-
+90
°
-5
°
-
+355
°
-67
°
-
+247
°
R
轴
(
手腕旋转
)
-140
°
-
+140
° -180° - +180° -210° - +210°
B
轴
(
手腕摆动
)
-30
°
-
+210
° -180° - +180° -180° - +180°
T
轴
(
手腕回转
)
-360
°
-
+360
°
-180° - +180° -210° - +210°
最大速度
S
轴
(
旋转
)
315°/s 130°/s 80°/s
L
轴
(
下臂
)
315°/s 130°/s 80°/s
U
轴
(
上腕
)
420°/s 180°/s 120°/s
R
轴
(
手腕旋转
)
600°/s 180°/s 130°/s
B
轴
(
手腕摆动
)
600°/s 250°/s 180°/s
T
轴
(
手腕回转
)
600°/s 250°/s 180°/s
容许力矩
R
轴
(
手腕旋转
)
0.42N
・
m 27.4N
・
m 58.8N
・
m
B
轴
(
手腕摆动
)
0.42N
・
m 27.4N
・
m 58.8N
・
m
T
轴
(
手腕回转
)
0.37N
・
m 9.8N
・
m 29.4N
・
m
容许
惯性力矩
(GD
2
/4)
R
轴
(
手腕旋转
)
0.00378kg
・
m
2
0.78kg
・
m
2
4.0kg
・
m
2
B
轴
(
手腕摆动
)
0.00378kg
・
m
2
0.78kg
・
m
2
4.0kg
・
m
2
T
轴
(
手腕回转
)
0.00299kg
・
m
2
0.1kg
・
m
2
2.0kg
・
m
2
本体质量
7kg 48kg 140kg
电源容量
*
4
0.5kVA 1.0kVA 1.5kVA
*1: F= 置地式,W= 壁挂式,C= 倒挂式,S= 置架式,T= 倾斜式(请注意壁挂式、倾斜式时S轴的动作会有限制。)
*2: ISO 9283 为基准。
*3: YRC1000,YRC1000micro 对应机型记载的是自轴的动作范围而不是对地基准。(平行关节型的机型除外)
*4: 因用途,动作模式而异。
*5: T 轴向下使用时,最大可对应负载 1kg。
MOTOMAN-HC10DT
MotoMINI
MOTOMAN-HC20DT
5
搬运(通用用途)
点焊
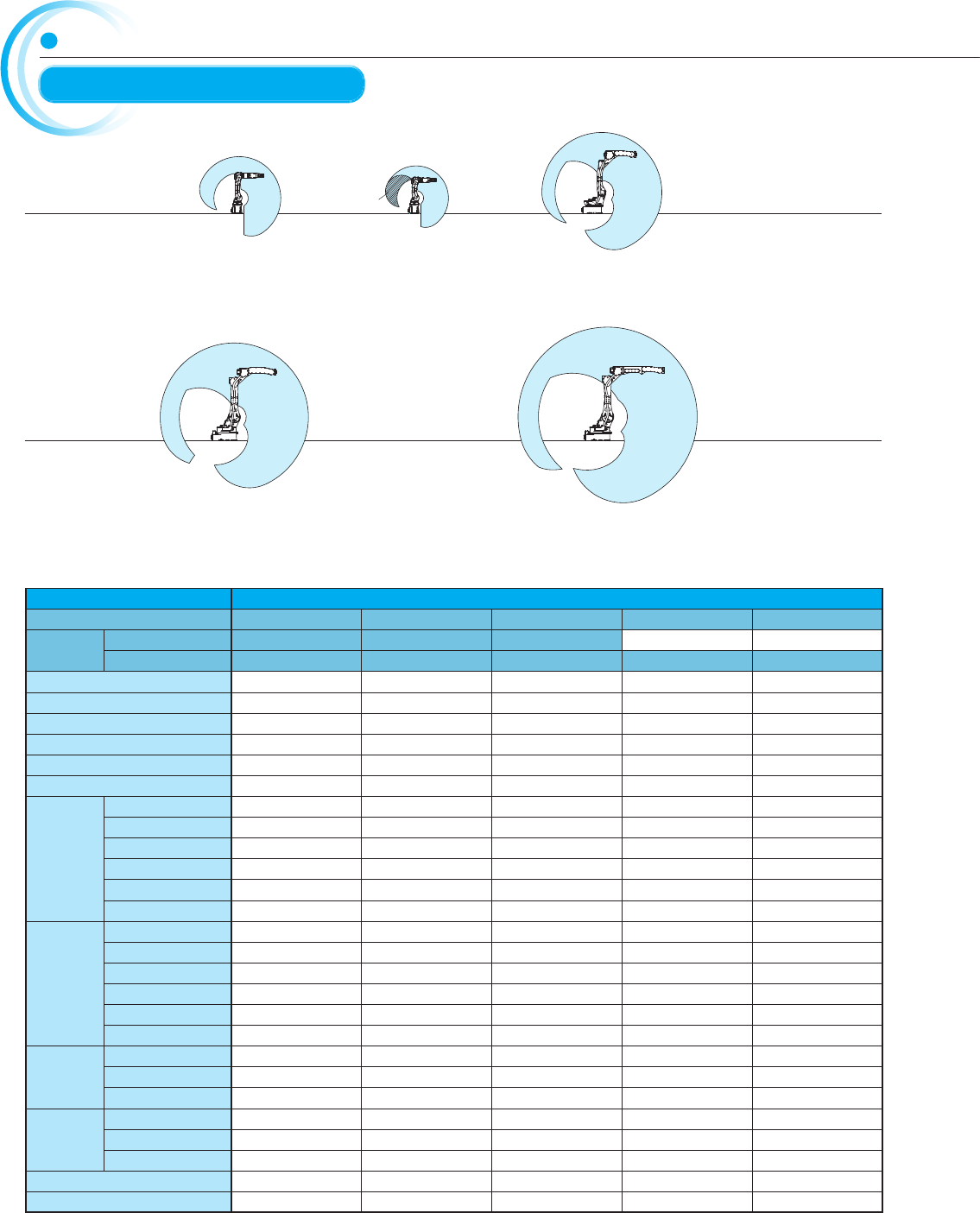
用途 搬运(通用用途)
机器人型号
MOTOMAN- GP7 GP8 GP12 GP25 GP25-12
适用
控制柜
YRC1000micro
○ ○ ○
YRC1000
○ ○ ○ ○ ○
设置
*
1
F,W,C,T F,W,C,T F,W,C,T F,W,C,T F,W,C,T
自由度
6 6 6 6 6
负载
7kg 8kg 12kg 25kg 12kg
垂直伸长度
1693mm 1312mm 2511mm 3089mm 3649mm
水平伸长度
927mm 727mm 1440mm 1730mm 2010mm
重复定位精度
*
2
0.01mm 0.01mm 0.02mm 0.02mm 0.03mm
动作范围
S
轴
(
旋转
)
-170° - +170° -170° - +170° -170° - +170° -180° - +180° -180° - +180°
L
轴
(
下臂
)
-65° - +145° -65° - +145° -90° - +155° -105° - +155° -105° - +155°
U
轴
(
上腕
)
*
3
-70° - +190° -70° - +190° -85° - +150° -86° - +160° -86° - +160°
R
轴
(
手腕旋转
)
-190° - +190° -190° - +190° -200° - +200° -200° - +200° -200° - +200°
B
轴
(
手腕摆动
)
-135° - +135° -135° - +135° -150° - +150° -150° - +150° -150° - +150°
T
轴
(
手腕回转
)
-360° - +360° -360° - +360° -455° - +455° -455° - +455° -455° - +455°
最大速度
S
轴
(
旋转
)
375°/s 455°/s 260°/s 210°/s 210°/s
L
轴
(
下臂
)
315°/s 385°/s 230°/s 210°/s 210°/s
U
轴
(
上腕
)
410°/s 520°/s 260°/s 265°/s 220°/s
R
轴
(
手腕旋转
)
550°/s 550°/s 470°/s 420°/s 435°/s
B
轴
(
手腕摆动
)
550°/s 550°/s 470°/s 420°/s 435°/s
T
轴
(
手腕回转
)
1000°/s 1000°/s 700°/s 885°/s 700°/s
容许力矩
R
轴
(
手腕旋转
)
17N
・
m 17N
・
m 22N
・
m 52N
・
m 22N
・
m
B
轴
(
手腕摆动
)
17N
・
m 17N
・
m 22N
・
m 52N
・
m 22N
・
m
T
轴
(
手腕回转
)
10N
・
m 10N
・
m 9.8N
・
m 32N
・
m 9.8N
・
m
容许
惯性力矩
(GD
2
/4)
R
轴
(
手腕旋转
)
0.5kg
・
m
2
0.5kg
・
m
2
0.65kg
・
m
2
2.3kg
・
m
2
0.65kg
・
m
2
B
轴
(
手腕摆动
)
0.5kg
・
m
2
0.5kg
・
m
2
0.65kg
・
m
2
2.3kg
・
m
2
0.65kg
・
m
2
T
轴
(
手腕回转
)
0.2kg
・
m
2
0.2kg
・
m
2
0.17kg
・
m
2
1.2kg
・
m
2
0.17kg
・
m
2
本体质量
34kg 32kg 150kg 250kg 260kg
电源容量
*
4
1.0kVA 1.0kVA 1.5kVA 2.0kVA 2.0kVA
*1: F= 置地式,W= 壁挂式,C= 倒挂式,S= 置架式,T= 倾斜式(请注意壁挂式、倾斜式时S轴的动作会有限制。)
*2: ISO 9283 为基准。
*3: YRC1000,YRC1000micro 对应机型记载的是自轴的动作范围而不是对地基准。(平行关节型的机型除外)
*4: 因用途,动作模式而异。
*5: 使用气体且电磁阀内置(选项功能)时,相对侧接头的适用限制在斜线部分的动作范围。
*
5
MOTOMAN-GP7 MOTOMAN-GP8 MOTOMAN-GP12
MOTOMAN-GP25 MOTOMAN-GP25-12
6
搬运(通用用途)