BM123教材初级培训课本.pdf - 第48页
v1.4-061221 48/89 [Move2] 1 2
v1.4-061221
47/89
1.Head
a.Nozzle的类型指定。(Nozzle Name OR Nozzle No.)
b.X-Y Speed(X-Y移动速度指定,1~8速,1为High)
c.Theta Speed(Nozzle旋转速度,1~4速,1为High)
d.Theta Rotate(指定Nozzle的旋转是在吸着以前还是扫描 以后)
Depend on Camera(视Camera的情况而定)
Before Pickup (在吸着之前旋转)
After Scanning (在扫描之后旋转)
c.Nozzle Movement-Pickup(选择在吸着时Nozzle上/下的动作)
d.Nozzle Movement-Mount(选择在贴装时Nozzle上/下的动作)
《Recommended Value》关于b~d项内容推举值的设定。
2.Pick Up Check(再吸着指定)
3.Dispose
对抛料的处理
a.Rotate(指定抛料的角度,0度,90度)
b.Dispose to(抛料位置的指定)
0-抛料盒,1-Covery1(Small,X=36.5),2-Convery2(Large,X=64.5)
v1.4-061221
48/89
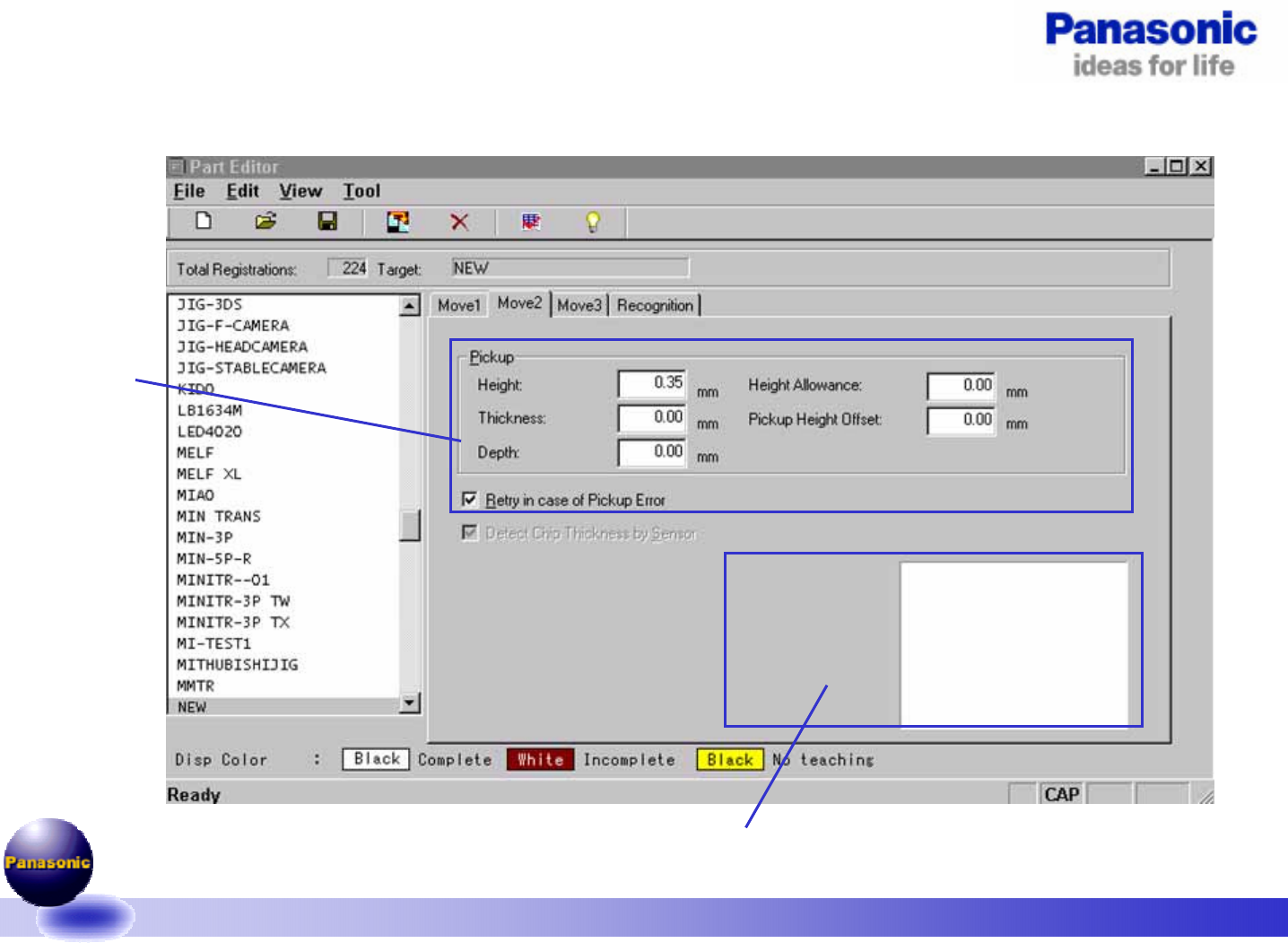
[Move2]
1
2
v1.4-061221
49/89
1.Pick Up
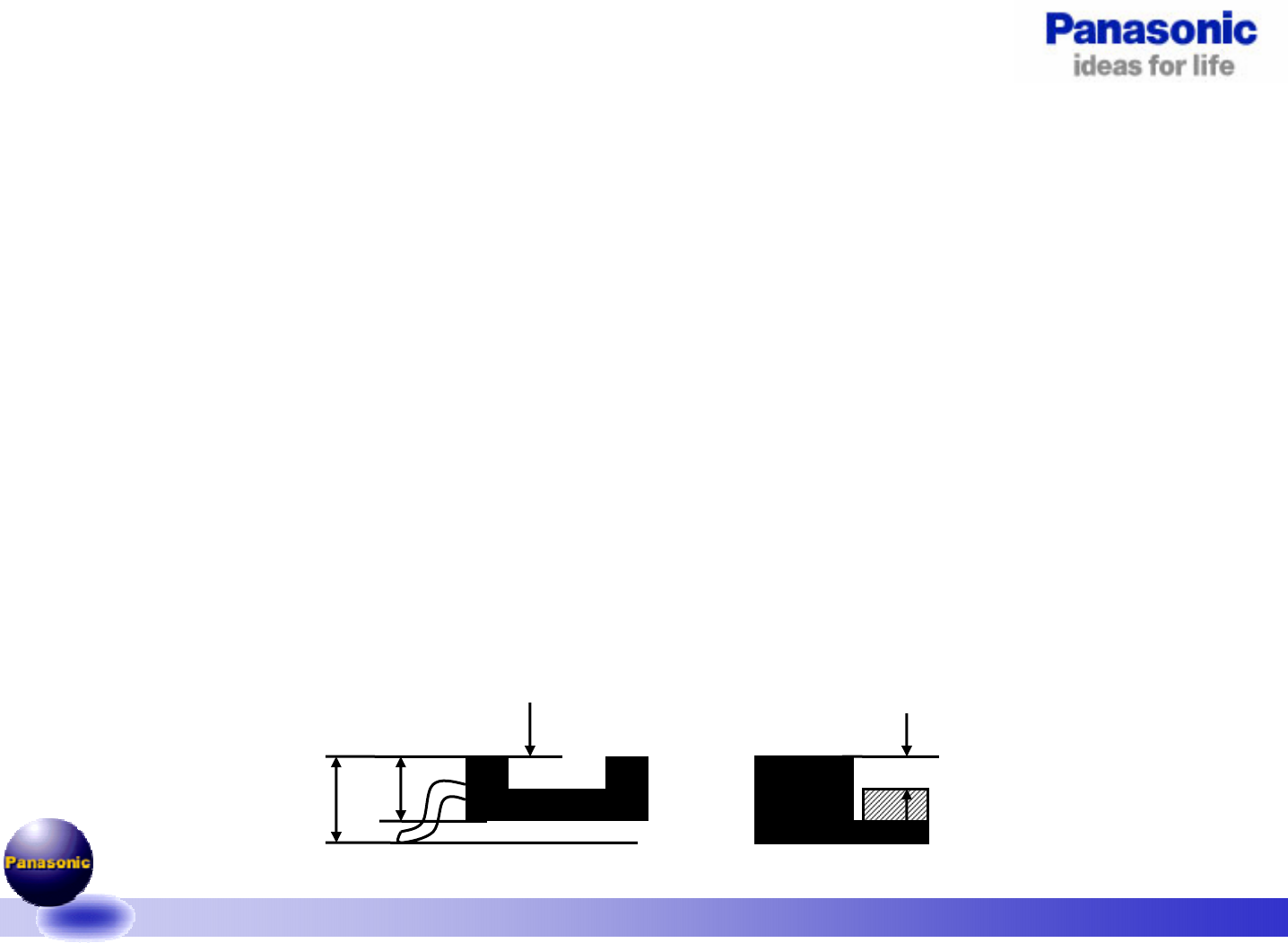
a.Height/Thickness(输入元件的高度和厚度,0.01~25.00mm)
b.Depth(吸着面到元件面的深度)
c.Height Allowance(允许公差)
d.Pickup Height Offset(吸着补正)
2. 再吸着
发生吸着错误,识别错误时,废弃元件,进行再吸着。
在Ref./机器数据/运转条件数据中设定的再吸着次数之内,尝试再吸着。
OFF:因吸着错误,机器停止
提示: 如不想自动废弃QFP等高价元件,请设定OFF。
Depth
d.
T
H