KE-2030使用说明书.pdf - 第17页
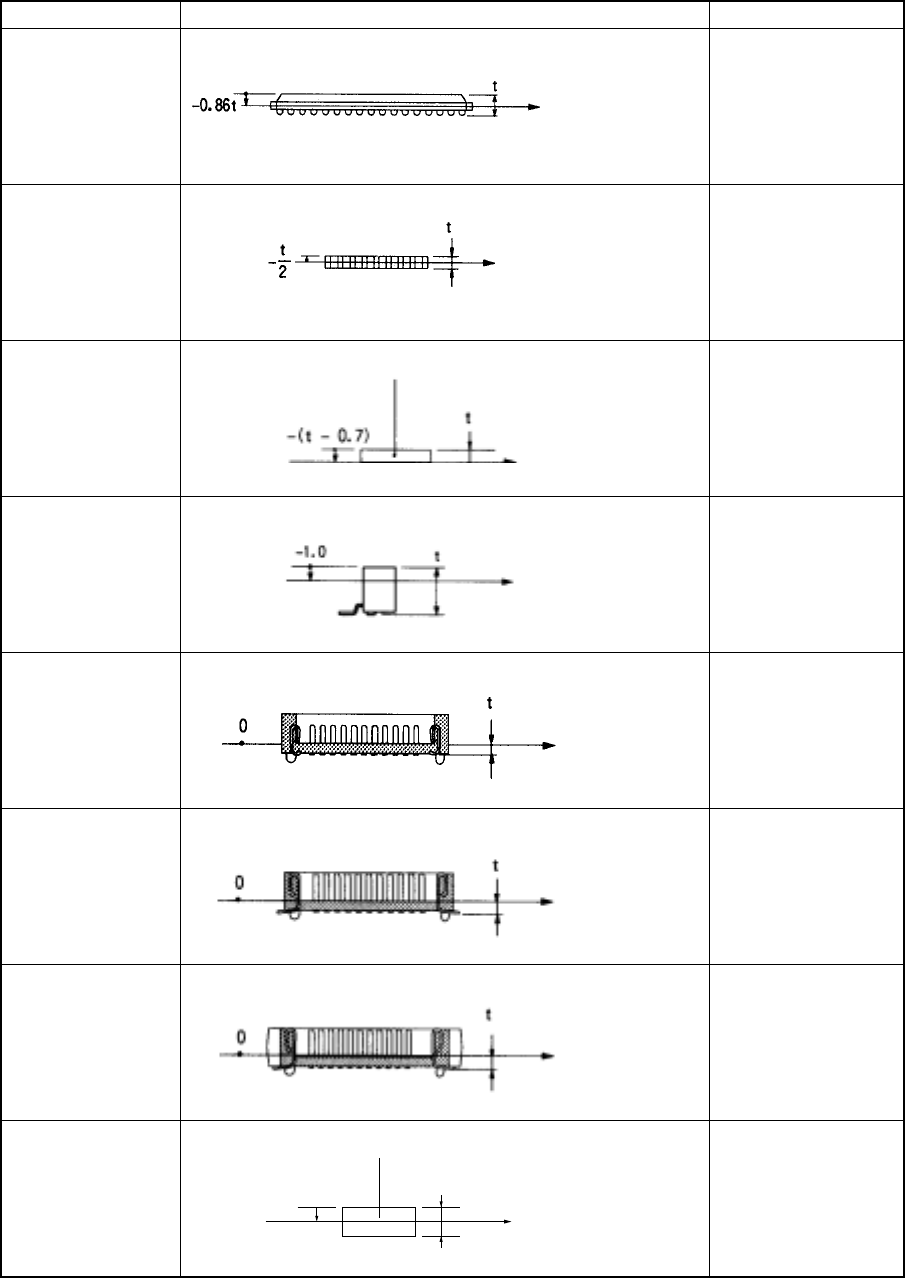
1 − 8 Component ty pe Measurement position Laser height (mm) BGA FBGA -0.86 × t Networ k resistor Same as that of the square chip Trimmer - (t – 0.7) Unidirectional lead connector 2-way lead connector Z-lead connector -1…
1 − 7
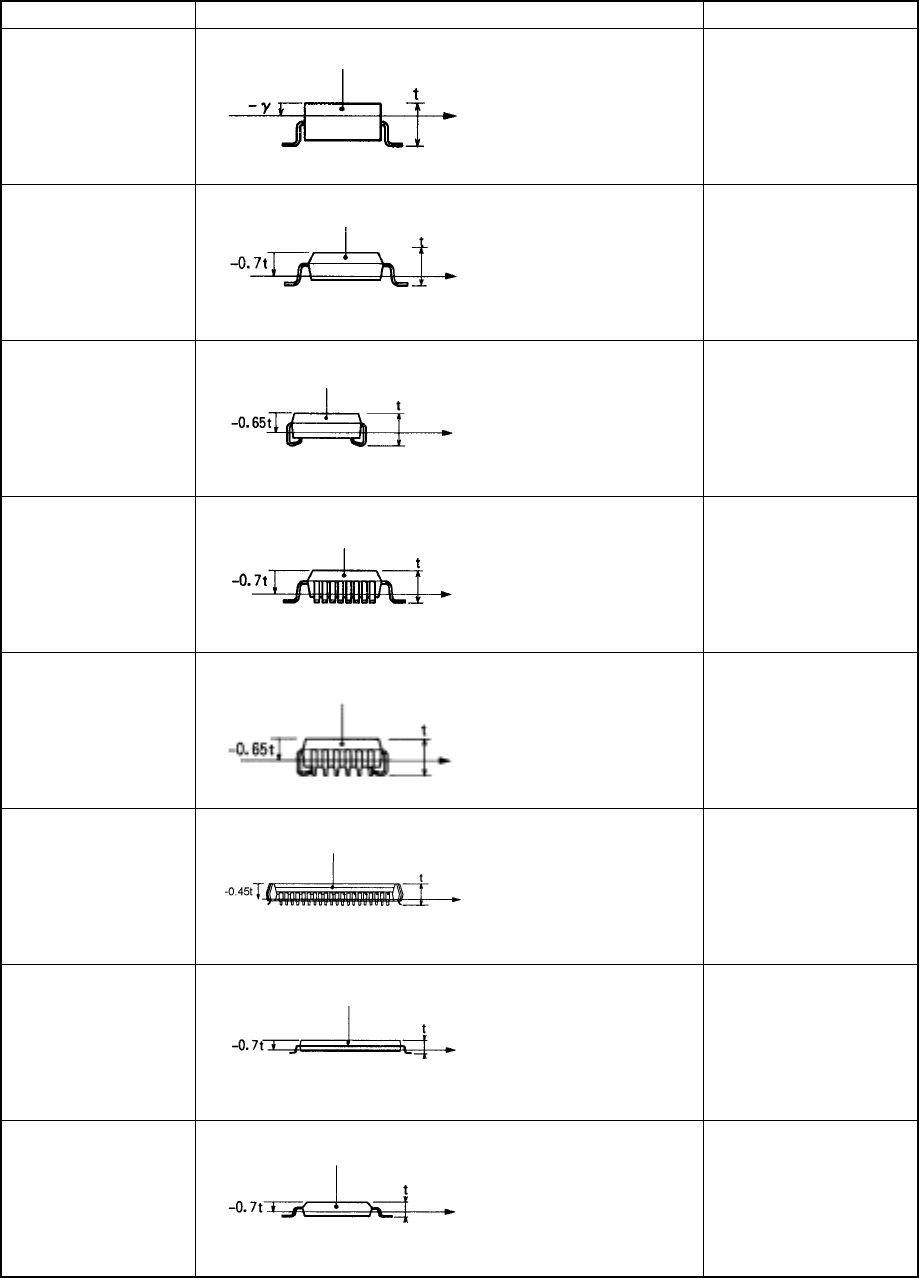
Component type Measurement position Laser height (mm)
SOT
-
γ
γ
= 0.25
SOP
HSOP
-0.7
×
t
SOJ
-0.65
×
t
QFP
-0.7
×
t
QFJ (PLCC)
-0.65
×
t
PQFP (BQFP)
-0.45
×
t
TSOP
-0.7
×
t
TSOP 2
-0.7
×
t
(To be continued)
Component height
Measurement
p
osition with laser
Molding
Component height
Measurement
p
osition with laser
Molding
Component height
Molding
Component height
Measurement
p
osition with laser
Molding
Component height
Measurement position
with laser
Molding
Component height
Measurement
position with laser
Molding
Measurement
p
osition with laser
Component height
Molding
Measurement position
with laser
Measurement position
with laser
Molding
Component height
1 − 8
Component type Measurement position Laser height (mm)
BGA
FBGA
-0.86
×
t
Network resistor
Same as that of the
square chip
Trimmer
- (t – 0.7)
Unidirectional
lead connector
2-way lead
connector Z-lead
connector
-1.0
J-lead socket
0
Gull-wing socket
0
Socket with
bumper
0
Other
components
-0.5
×
t
Measurement
position with
laser
Component height
Molding
Component height
Measurement position
with laser
Measurement position
with laser
Component height
Measurement position
with laser
Component height
-0.5t
t
Component height
Component height
Component height
Measurement
position with
laser
Measurement
position with
laser
Measurement
position with
laser
Component height
Measurement
position with laser
Molding
1 − 9
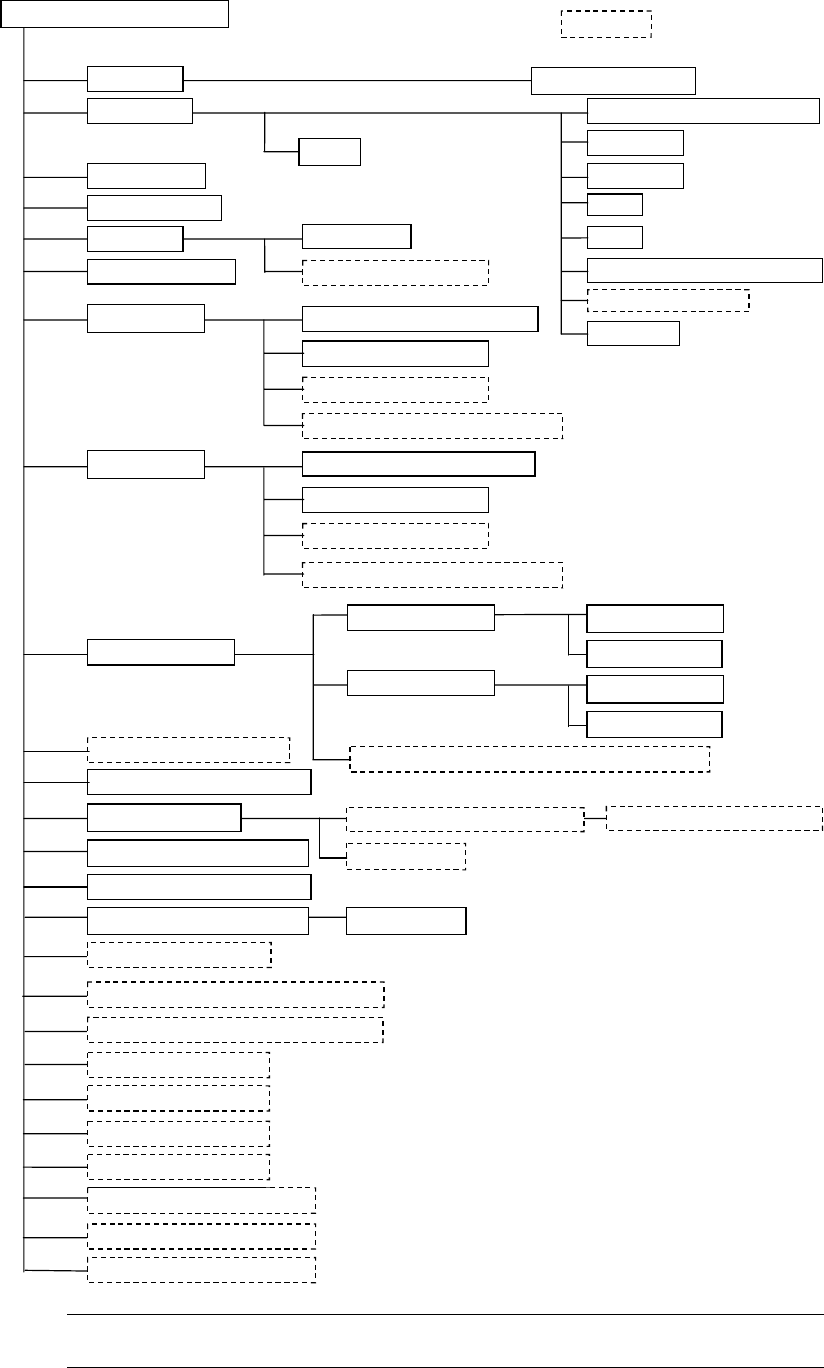
1.1.3 System configuration
Color liquid-crystal display (LCD)
Keyboard
Track ball
FDD
HDD
100 Base/10 Base Ethernet board
Rear side operation unit *1
Area sensor
(
for the rear side only)
Signal tower
Emergency stop button
Optional
Spare feeder change truck (30)
Signal tower with the buzzer
Placing head L
Laser recognition head (MNLA)
Offset correction camera
Bad mark reader (30)
Height Measurement System 30 (HMS)
Automatic tool changer (ATC)
Feeder float detecting function
Pneumatic piping system
Vision Centering System (VCS)
Batch feeder change function (30)
Placing head R
Laser recognition head (MNLA)
Offset correction camera
Bad mark reader
Height Measurement System (HMS)
Feeder bank driver
Verification function (30)
Vision monitor
Feeder table
PWB conveyor unit
Power unit
CPU board
I/O control CPU
Motor control unit
Cabinet
X-Y positioning unit
Placement station L
Placement station R
Automatic PWB transportation width adjustment device
UPS
Feeder position indicator function (30)
Automatic tape cutter (short tape length type)
Bulk feeder
Tape feeder
Stick feeder
Host Line Computer (HLC)
Stack stick feeder
Non-stop operation function
Host Line Computer (HLC)
External Programming Unit (EPU)
KE-2030M /KE-2030L/KE-2030E
Pin reference
Outline reference
Pin reference
Outline reference
*1
*1
*1
*1
*1
*1
*1
*1
*1
SOT Direction Check Function
*1
Note:
Options marked with an asterisk "*" are to be installed onto the main
unit at the factory.