JM-20 操作说明书 Rev06.pdf - 第106页
操作手册 Ⅱ 2- 73 元件 形状 动作 用途 Config2 Config1 无法识别 ,使用多 边形 元件。 在计测过程中 元件旋转时, 光照到元件的影幅 发 生变 化。按照该影幅的变化 量 计算 元件的位置偏 差、角度偏差。 在最开始, 找到 影幅最小的点 ( 第一最小点 ) ,之 后继续旋转元件 , 找到下一影幅最小 点 ( 第二最小 点 ) 。 根据这 2 点, 计算出元件 的位置偏差、 角度 偏差。 因为是以影幅计算位置偏…
操作手册Ⅱ
2-72
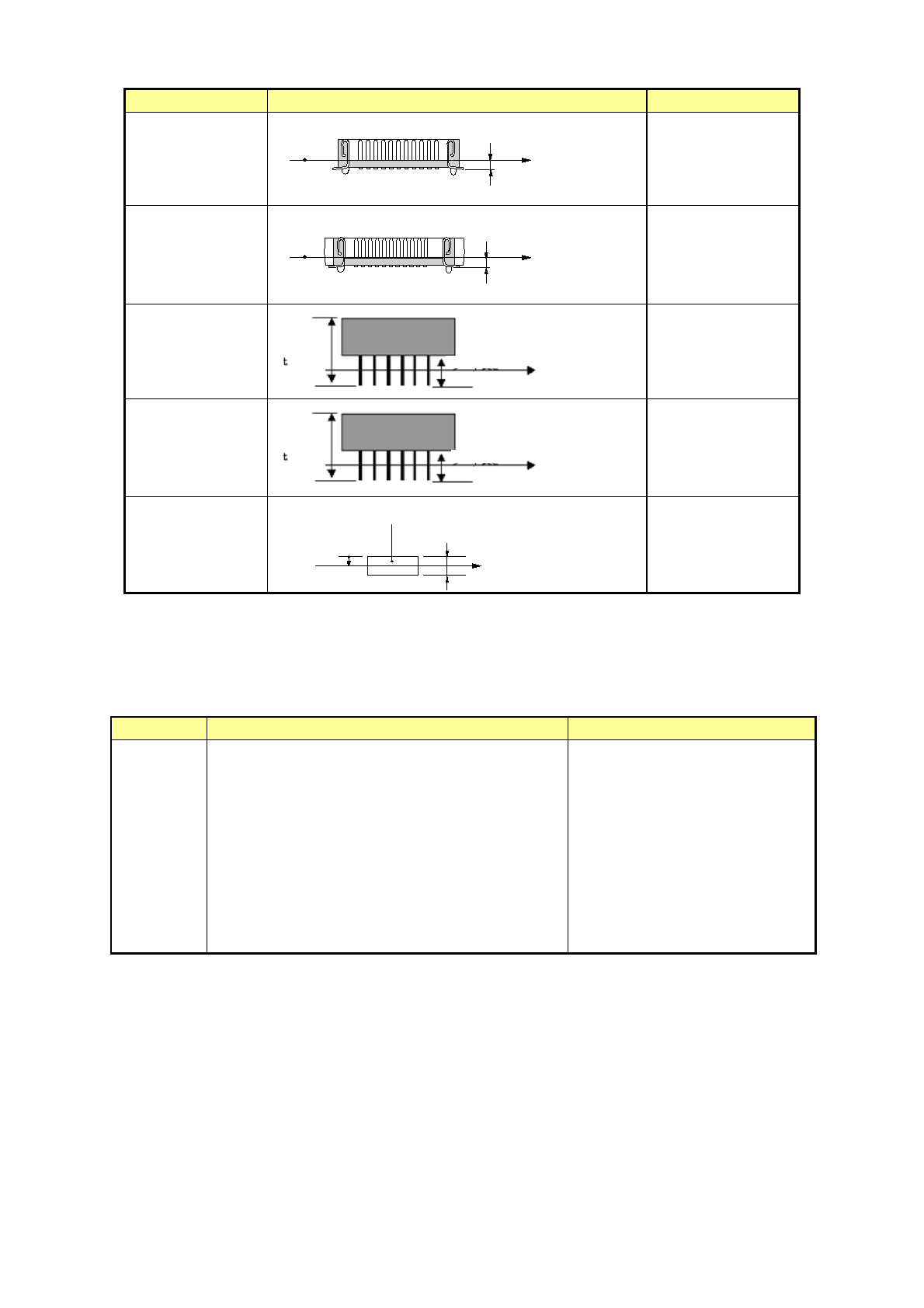
元件种类
测量位置
测量高度(mm)
鸥翼式插座
t
0
0
带减震器的插座
t
0
0
插入元件
- (t - 1)
INS 电解电容器 - (t - 1)
其他元件
t
-0.5t
-0.5×t
注 1:对 0
603 电阻等方形芯片元件贴片,当发生角度偏差时,在元件数据的[定心]选项卡画面中,
将[激光高度]的数值向元件上面移动–t/3 (默认值为–t/2),有时可以改善。
4)元件形状
可指定
激光识别用的元件形状。主要用途如下所示。
元件形状
动作
用途
Config1
针对元件检测出外接接线,以最小四边形界定外
接接线,对位置偏差、角度偏差进行计算、补正
,
然后实施贴片。
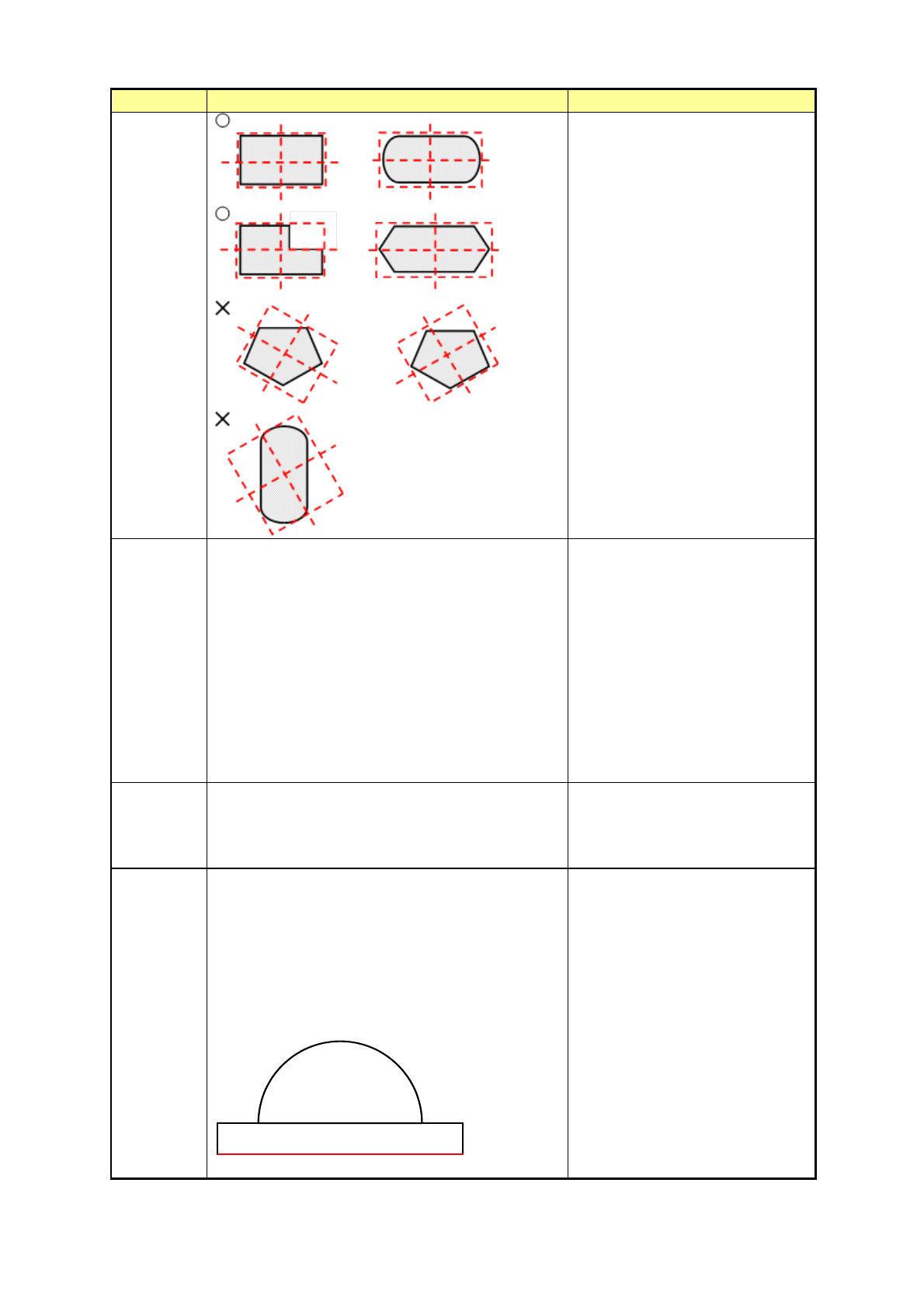
为了计算四边形界定区域
的位置偏差、角度偏差,
使用形状近似正方形以及长方形的元件。
即使是包含圆角的元件,也可以识别出在直线位
置下的元件。若下部位置为圆形时,因为角度不
确定,无法识别。
为多边形时,无法明确界定外接四边形,所以无
法稳定识别。
形状近似正方形、长方形的元件
激光测定位置
元件高度
激光测定位置
激光测定位置
元件高度
激光测定位置
元件高度
激光测定
位置
元件高度
模部
引脚长度
引脚长度
元件高度
操作手册Ⅱ
2-73
元件形状
动作
用途
Config2
Config1 无法识别,使用多边形元件。
在计测过程中元件旋转时,光照到元件的影幅发
生变化。按照该影幅的变化量计算元件的位置偏
差、角度偏差。
在最开始,找到影幅最小的点 (第一最小点),之
后继续旋转元件,找到下一影幅最小点(第二最小
点)。根据这 2 点,计算出元件的位置偏差、角度
偏差。
因为是以影幅计算位置偏差、角度偏差,所以为不易受元
件外形影响的识别方法。
Config
1 无法识别的异形元件
Config3
根据测量数据计算吸取角度位置偏差,实施补正
,
然后贴片。
与 Config2 动作相同,但忽略识别结果的角度。
没有角
的圆筒元件
Config4
使用元件的重心,计算元件幅宽、位置偏差量。
使用元件的 1 边计算角度。
对 JM-10 中的元件形状,与 flexible3 近似的元
件识别方法。在 JM-10 的 flexible3 中不能指定
元件的 1 边,但 JM-20 的 Config4 可以指定。
指定在「Config4 基准角度」中进行设置。
详细内容在「Config4 基准角度」项目中予以说
明。
使用 C
onfig1 及 Config2,也不
能按照意图角度进行贴片的异形
元件
操作手册Ⅱ
2-74
Config5
在对
象元件的计测部位有引脚等间隙时使用。
与 Config1 的动作相同,但存在间隙时会漏光造
成噪音,追加了消除噪音的动作。
JM-20 时,即使选择 Config1 也有与 Config5 动
作相同的元件种类 (插入元件、INS 电解电容器
等)。此 Config 是为了与其他机型保持互换性而
追加的。在 JM-20 无需刻意选择 Config5
用于激光定心不稳定的元件(超
规线圈、中空的检查端子、LED。
Config0
从吸取姿势按贴片角度进行旋转并贴片。
用于激光定心不稳定的元件(超
规格的极薄的元件)。不进行定
心即贴片。因此,贴片位置会被
吸取位置影响。
注意
元件形状根据元件类型决定其初始值。通 常 ,如果变更会导致错误发生率提高
。
除特殊情况以外,切勿变更。
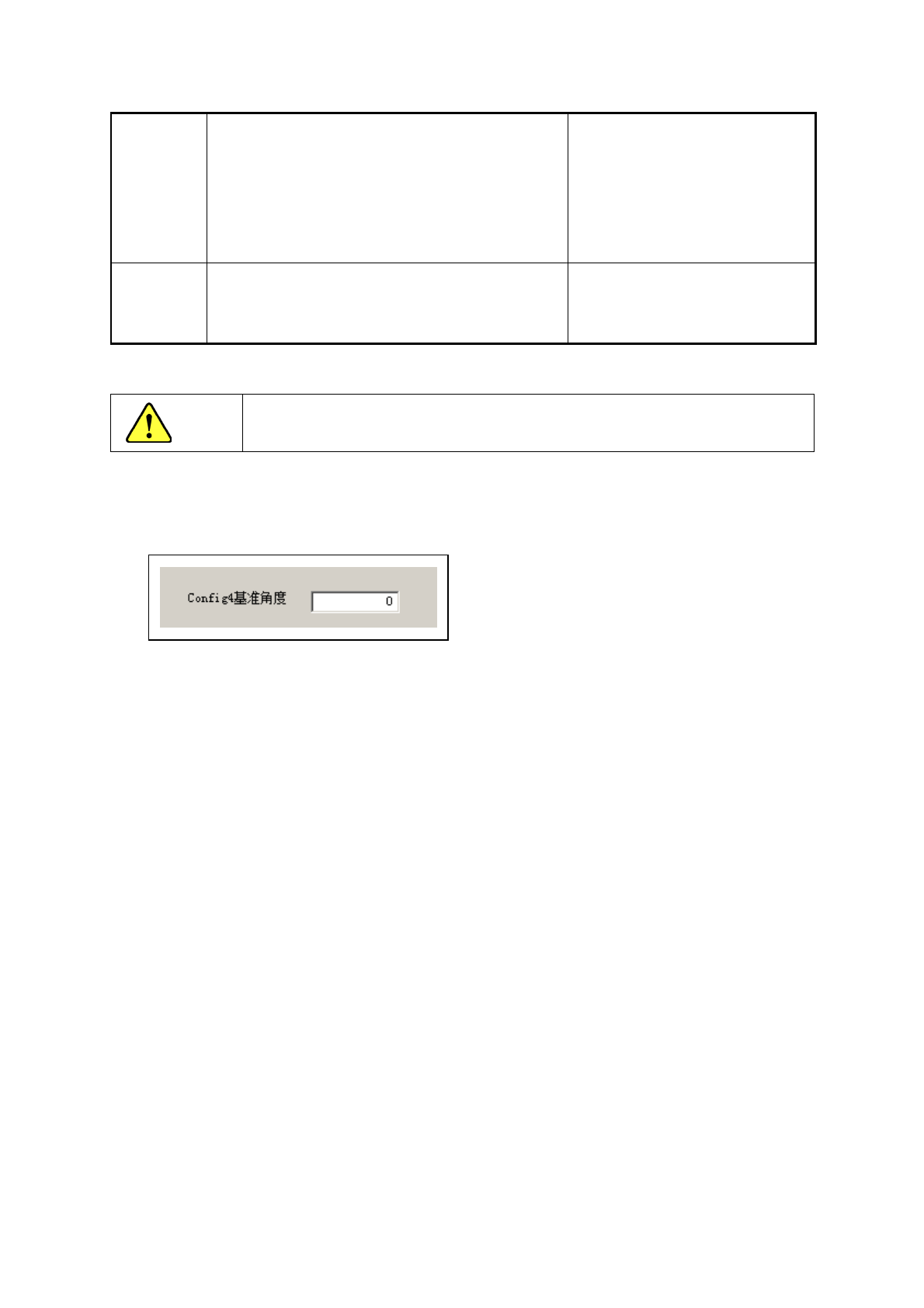
5) Config
4 基准角度
仅选择了 Config4 时,可以编辑。
已设置
的角度仅在 Config4 有效。对其他元件形状无任何影响。
Config
4 基准角度在 0 °– 359°的角度范围内指定。
此 Con
fig4 基准角度设置,对元件的激光识别角度有影响。
对于其他 Config,前提是元件为长方形/正方形,计测激光识别角度。
但为插入元件时,有时元件由复杂的多边形构成。此时,元件为长方形/正方形的前提不再存在,所
以就会得到激光识别角度与操作者意图角度不符的结果。此结果,将造成元件不能插入的情况。在
此种情况下使用 Config4。
在 Conf
ig4 中激光识别角度的计算,是以元件的边为基准进行角度计算的。测量对象元件的边距离
基准边多少,将作为激光识别角度的结果。
因为以边作为基准,所以边长越长,激光识别角度就越正确。因为需要输入角度,角度输入推荐指
定简单的水平、垂直的边。若指定其他的边,需要输入正确的角度。
吸
取元件并旋转 0°的状态(作成元件数据时的元件状态)作为最初的基准。
以正三角形的元件为例,进行以下说明。
正三角
形在下图情况下,以下边作为基准时,请输入 0°(下图的红线)。在该状态下,与 JM-10 的
flexible 3 以相同边作为基准。