JM-20 操作说明书 Rev06.pdf - 第262页
操作手册 Ⅱ 2- 229 编号 元件类型 定中心 方式 测量项目 元件尺寸 吸取真空 压力 激光 高度 引脚 信息 阈值 余量 纵横 高度 9 PLCC (Q FJ) 激光 - ○ ○ ○ - - 图像 - ○ ○ - - - 10 PQFP( BQFP) 激光 △ ○ ○ ○ - - 图像 ○* 1 ○ ○ - ○* 1 - 11 T SOP 激光 △ ○ ○ ○ - - 图像 ○* 1 ○ ○ - ○* 1 - 12 TS OP …
操作手册Ⅱ
2-228
3)
元件真空压力测量功能
测量吸取元件时的真空压力。测量方式如下所示。
对象元件
方式
激光识别元件
图像识别元件
①吸取元件,获得
Head
真空压力级别。
↓
②将获得的值作为
Head
真空级别。
4)
引脚信息测量功能
利用图像识别装置测量引脚信息。仅限于图像定中心的元件进行测量。测量方法如下。
对象元件
方式
图像识别元件
①利用图像识别装置识别元件获取引脚信息。
↓
②将获得的值作为引脚尺寸。
5)
阈值、余量测量機能
根据元件方向判别设置的判断方式、判断高度、判断角度、吸取补正高度,用激光测量元件尺
寸,由得到的数值求出阈值和余量。仅插入元件或 INS 电解电容器可以执行该测定。以下所示
为测量方式。
对象元件
方式
包装为
INS
散装的插入元件
、
INS 电解电容器
①
根据元件方向判别设置,通过激光取得元件尺寸。
↓
② 由所得值求出阈值和余量。
6)
吸取高度设定功能
进行轴向元件的吸取高度设定。同时也将自动计算最优激光高度。测量方式如下所示。
对象元件
方式
轴向元件(仅限供料器
类型为 MAF-S 、
MAF-L
的元件)
①
使用激光取得吸嘴前端高度及元件吸取时的高度。
↓
②以取得的值设定吸取高度。
(2)
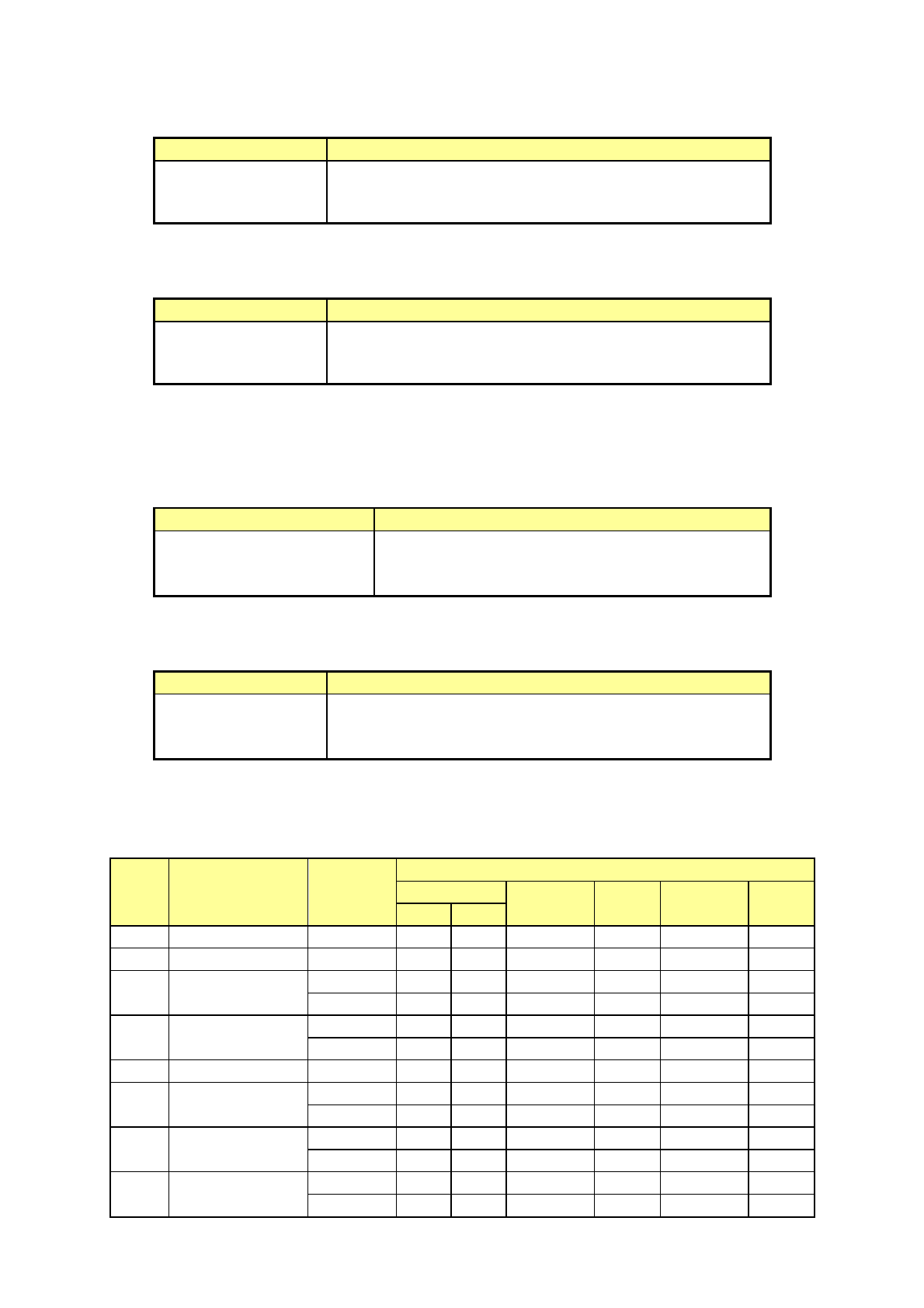
元件类型本身的测量项目限制
因元件数据的元件类型不同,测量项目会受到下列限制。
编号
元件类型
定中心
方式
测量项目
元件尺寸
吸取真空
压力
激光
高度
引脚
信息
阈值
余量
纵横
高度
1
方形芯片
激光
○ ○ ○ ○ - -
2
圆筒形芯片
激光
○ ○ ○ ○ - -
3 铝电解电容
激光
- ○ ○ ○ -
图像
- ○ ○ - - -
4 GaAsFET
激光
- ○ ○ ○ - -
图像
- ○ ○ - - -
5
SOT
激光
○ ○ ○ ○ - -
6 SOP
激光
△ ○ ○ ○ - -
图像
○*1 ○ ○ - ○*1 -
7 SOJ
激光
- ○ ○ ○ - -
图像
- ○ ○ - - -
8 QFP
激光
△ ○ ○ ○ - -
图像
○*1 ○ ○ - ○*1 -
操作手册Ⅱ
2-229
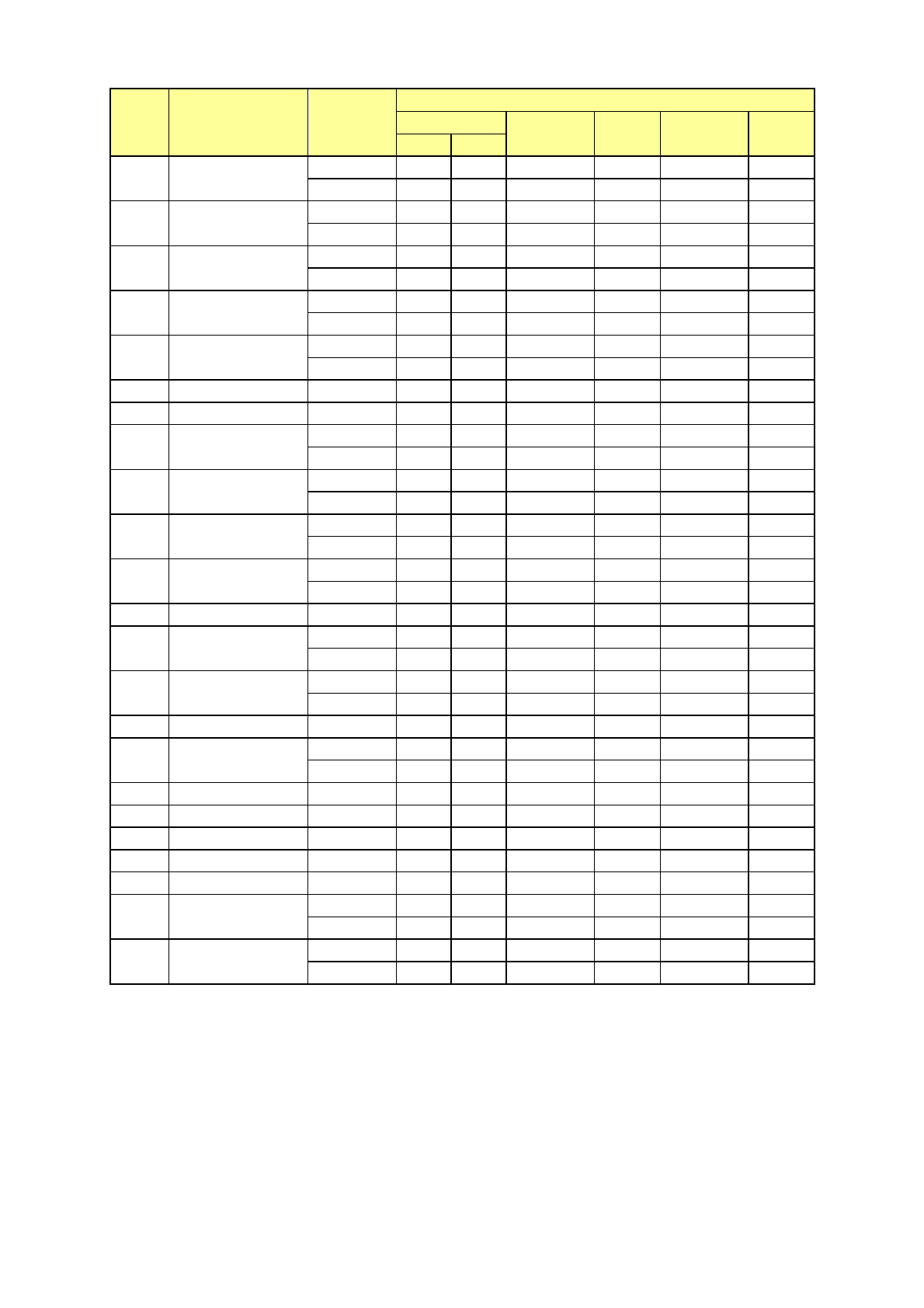
编号
元件类型
定中心
方式
测量项目
元件尺寸
吸取真空
压力
激光
高度
引脚
信息
阈值
余量
纵横
高度
9 PLCC(QFJ)
激光
- ○ ○ ○ - -
图像
- ○ ○ - - -
10 PQFP(BQFP)
激光
△ ○ ○ ○ - -
图像
○*1 ○ ○ - ○*1 -
11 TSOP
激光
△ ○ ○ ○ - -
图像
○*1 ○ ○ - ○*1 -
12 TSOP2
激光
△ ○ ○ ○ - -
图像
○*1 ○ ○ - ○*1 -
13 BGA
激光
- ○ ○ ○ - -
图像
- ○ ○ - - -
14
网络电阻
激光
- ○ ○ ○ - -
15
微调电容器
激光
- ○ ○ ○ - -
16
单向引脚连接器
激光
- ○ ○ ○ ○*2 -
图像
- ○ ○ - ○*1, *2 -
17
J 引脚插座
激光
- ○ ○ ○ - -
图像
- ○ ○ - - -
18
鸥翼形插座
激光
- ○ ○ ○ - -
图像
- ○ ○ - - -
19
带减震器的插座
激光
- ○ ○ ○ - -
图像
- ○ ○ - - -
20
其他元件
激光
- ○ ○ ○ - -
21
双向引脚连接器
激光
△ ○ ○ ○ ○*2 -
图像
○*1 ○ ○ - ○*1, *2 -
22
带散热器 SOP
激光
△ ○ ○ ○ - -
图像
○*1 ○ ○ - - -
23
FBGA
图像
- ○ ○ - - -
24
Z 引脚连接器
激光
- ○ ○ ○ - -
图像
- ○ ○ - - -
25
扩展引脚连接器
图像
- ○ ○ - - -
26
通用图像元件
图像
- ○ ○ - - -
27
方形芯片(
LED
)
激光
○ ○ ○ ○ - -
28
QFN
激光
- ○ ○ ○ - -
29
外形识别元件
图像
‐ ○ ○ - - -
30
插入元件
激光
‐
○ ○ ○ - ○
图像
‐
○ ○ - - -
31
INS 电解电容器
激光
‐
○ ○ ○ - ○
图像
‐
○ ○ - - -
○:可以测量。
△:可将定中心方式设定为“图像”后获得的测量结果加以利用。
*1 引脚根数仅限于每 1 列引脚在 7 根以上的元件。(SOP 14Pin 为可测量)
*2 由相同引脚形状构成,且引脚两端没有臂、金属零件的元件。
引脚信息,取决于被测量元件的引脚条件,有时可能无法测量。
测量功能的对象限于元件外形尺寸□33.5mm以下的元件。
操作手册Ⅱ
2-230
(3)
关于进行测量时的各项运行
1) 用于吸取的Head
可自动选择用于吸取的Head。使用Head时,优先使用已安装的吸嘴,以减少吸嘴的更换次
数。
根据吸嘴的Head安装情况,每次测量时,吸取的Head可能不同。并且,在方向判别测定中,
可以选择吸取所使用的贴片头。
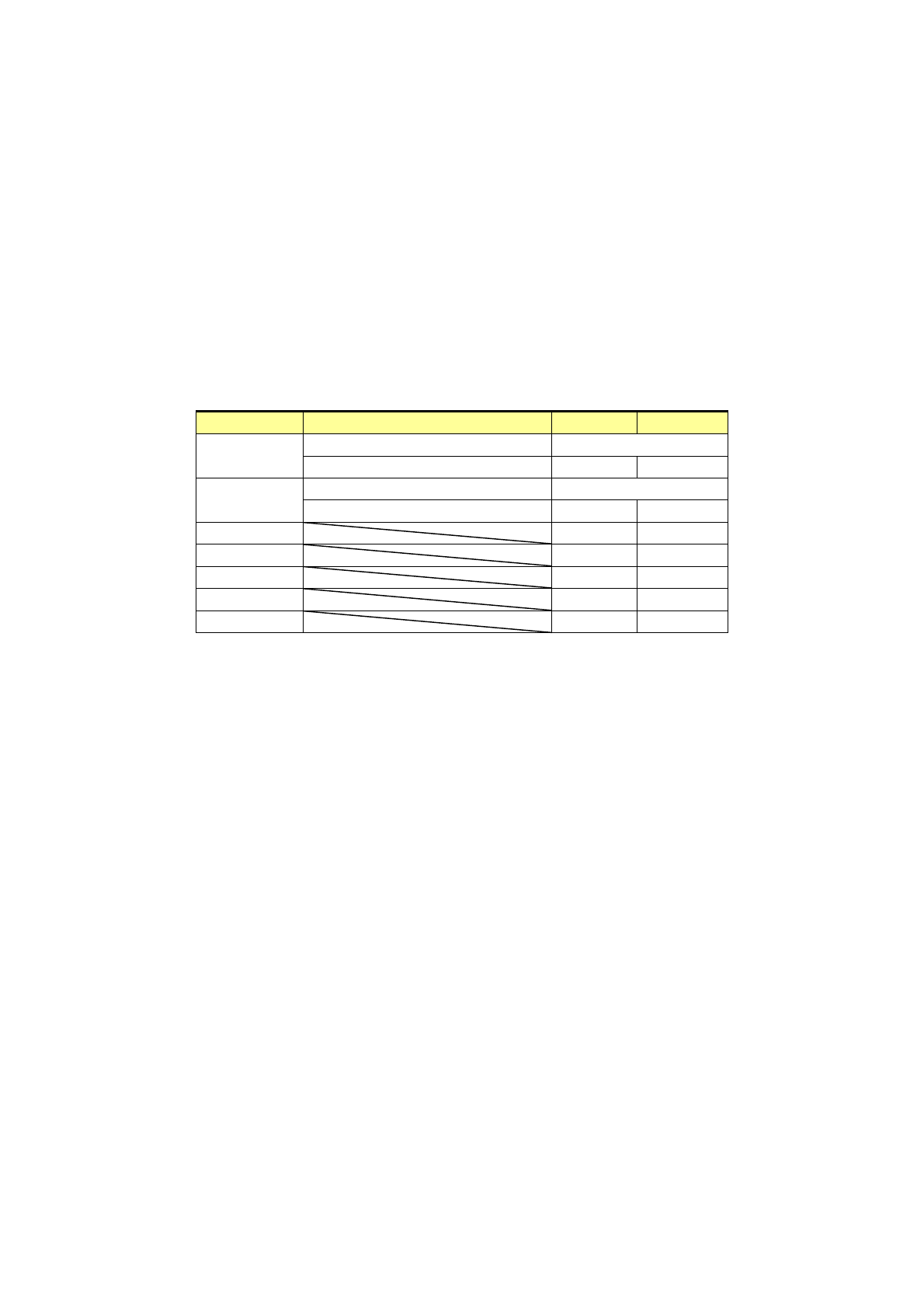
2) 测量后归还元件
按照设置,测量后的元件将被归还原来的位置或被废弃。具体因包装方式而异(如下表所示
)。
废弃时,根据元件数据中「元件废弃」的设置,废弃到指定的地方。
1mm以下的元件,归还时可能出现元件直立或翻倒,请根据询问选择运行。
包装方式
条件
归还
废弃
带状
外形尺寸短边
1mm
以下
确认*1
外形尺寸短边
1mm
以上
○ ○*2
散装
外形尺寸短边
1mm
以下
确认*1
外形尺寸短边
1mm
以上
○ ○*2
托架
○ ○
*2
MTS
○ ○
*2
管状
- ○
INS
状带
-
○
INS
散装
- ○
*1 显示提示信息,选择是将元件归还还是废弃。连续测量时,在开始前询问。
*2 当废弃方法为「IC 回收带」「元件保护」时,将按设定进行处理。
3)
选择用于吸取的供给装置
如果同一元件有多个供给装置(吸取数据),初始值为从最初输入的数据开始吸取元件。
单独测量、方向判别测定时,可根据需要改变供给装置。
4) 改变吸取坐标
无法顺利吸取时,可用手动输入或进行坐标示教,改变吸取坐标。在方向判别测定中,虽然
不能变更吸取坐标,但通过设定偏移量可以移动吸取坐标。使用示教按钮或HOD器件可以进
行示教。不反映在吸取数据中。
5) 手动吸取
当没有吸取数据时,可用手动将元件安装到吸嘴上。但在这种情况下,不能输入吸取坐标。
也不能操作供料器。