YS12编程.pdf - 第47页
2-2 2 1.1 基板参数 打开「基板」画面的「基板」选项卡画面,确认或设置基板参数。 基板参数画面 26201-P2-00 A,B: 基板尺寸 X,Y 以 mm 为单位输入基板的 XY 方向的尺寸。自动运行时,传送宽度 (W 轴 ) 自动控制为 Y 的尺寸。 X ∶基板传送方向的尺寸 Y ∶放置基板时传送宽度方向的尺寸 X [mm] Y [mm] 基板 基板 基板传送方向 基板外形 传送轨道 25201-P2-00 …
2-1
2
1.建立基板信息
基板信息中需设置基板的形状、生产方法、元件的贴装位置等参数。
在此,具体说明基本程序的制作方法。充分掌握作业内容后,可以按照适合自己的方法制作。
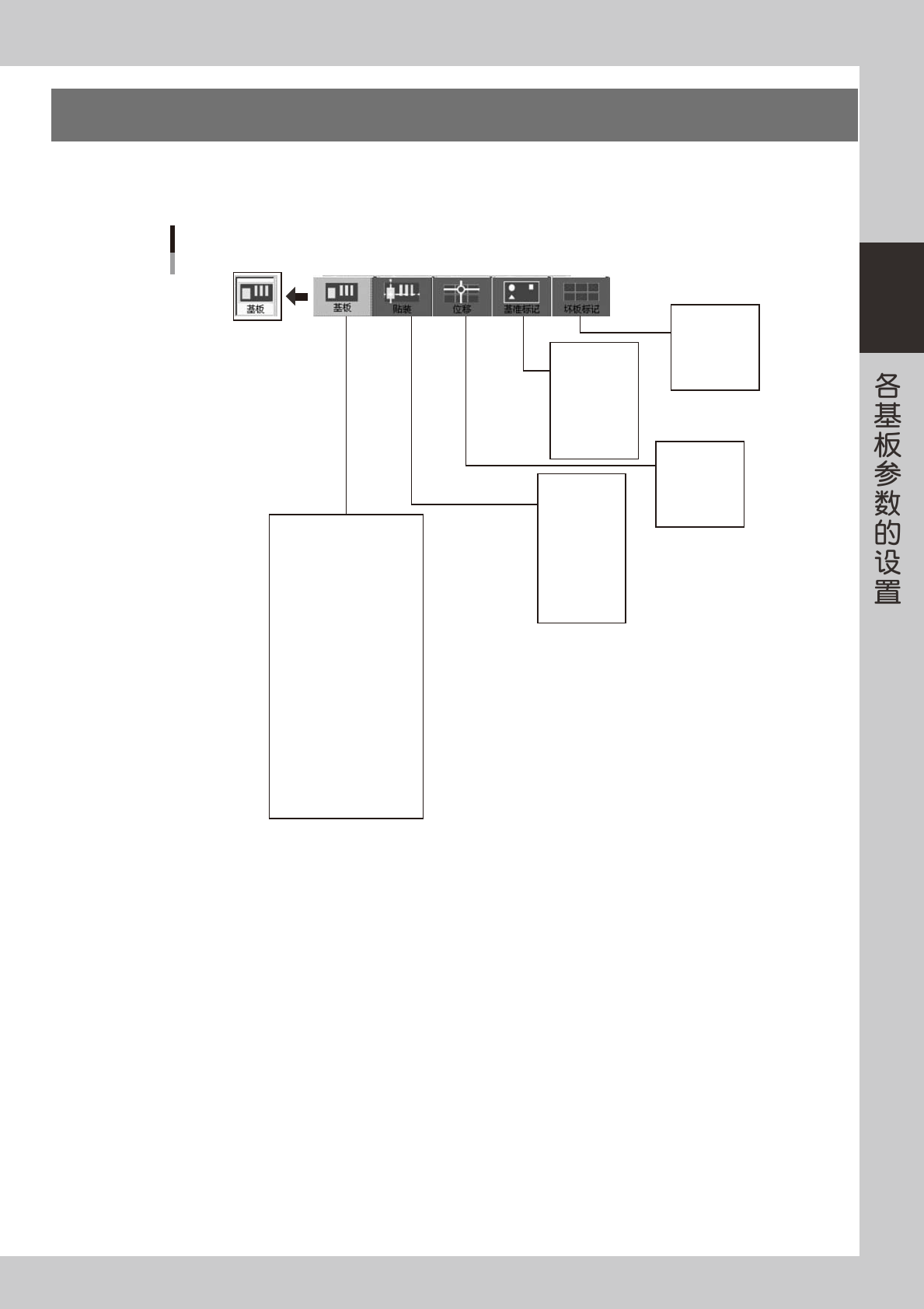
基板参数的构成
No.
图样名称
跳过
X、Y、R
元件号码
元件名称
Head
坏板标记
基准标记
基板尺寸XY
基板厚度
备注
目前生产枚数
预定生产枚数
一枚基板的拼块数
目前下料枚数
预定下料枚数
基板固定方法
固定开始计时
传送开始高度
传送带空转计时
图像处理校正
真空压确认
重新执行方式
提前取料
传送装置马达速度
送入前元件高度
跳过重新执行
No.
图样名称
种类
跳过
X、Y、R
No.
图样名称
种类
X、Y
标记
No.
图样名称
种类
X1、Y1
标记1
X2、Y2
标记2
26200-P2-00
2-2
2
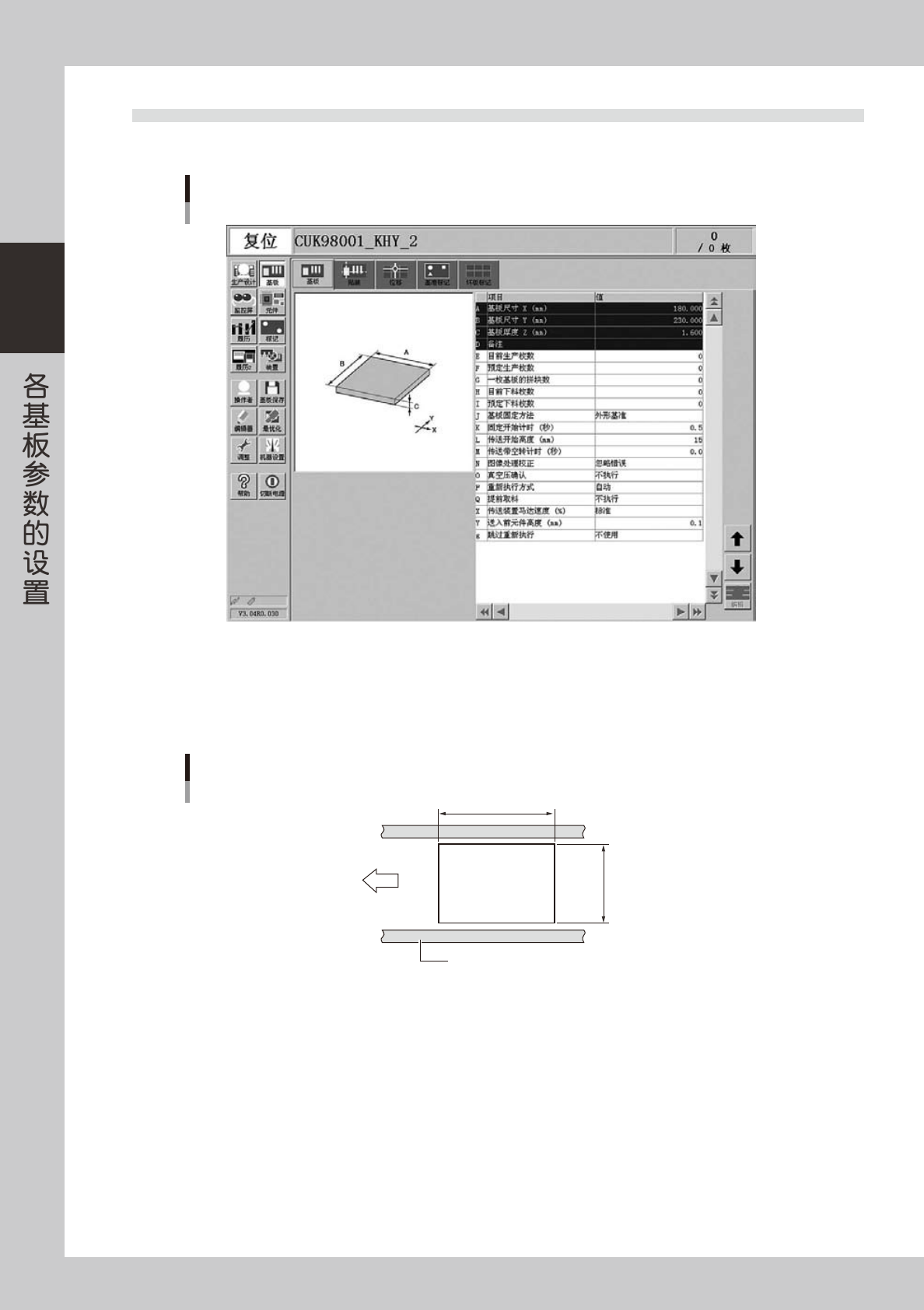
1.1 基板参数
打开「基板」画面的「基板」选项卡画面,确认或设置基板参数。
基板参数画面
26201-P2-00
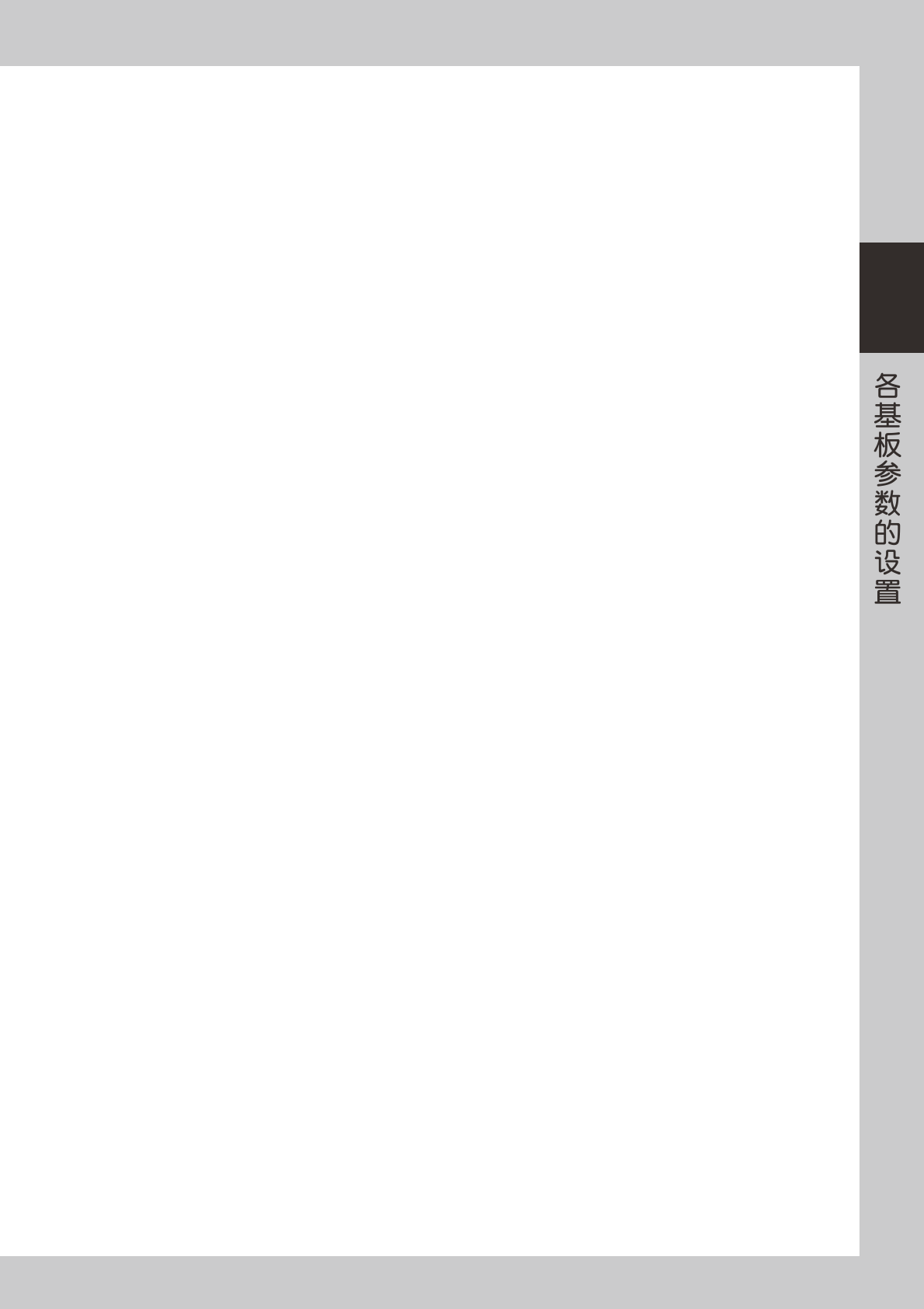
A,B: 基板尺寸 X,Y
以 mm 为单位输入基板的 XY 方向的尺寸。自动运行时,传送宽度 (W 轴 ) 自动控制为 Y 的尺寸。
X ∶基板传送方向的尺寸
Y ∶放置基板时传送宽度方向的尺寸
X [mm]
Y [mm]
基板
基板
基板传送方向
基板外形
传送轨道
25201-P2-00
C: 基板厚度 (mm)
输入基板的厚度。
D: 备注
记录有关基板的备注事项,空栏也无妨。
E: 目前生产枚数
记录已完成生产的基板数量。初始值设置为「0」。
F: 预定生产枚数
输入需生产的基板数量。
输入「0」时,只要供给基板,生产就会持续。
输入「0」以外的数据时,生产完所输入的基板张数后,运行停止。不再继续供给基板。
2-3
2
G: 一枚基板的拼块数
输入 1 枚基板中拼块的数量。
H: 目前下料枚数
记录已送入下料机的基板数量。初始值设置为「0」。
I: 预定下料枚数
指定下料机的一层载料箱可以容纳的基板数。完成设置数的基板生产后,机器会中断生产基板的送出,直到下料机更换载料箱。
如输入「0」,即使基板数量已经达到下料机可容纳的最大限度,生产也会继续进行。符合下列条件的情况,可以输入「0」。
·使用装有载料箱更换信号装置的下料机。
·设置在回流焊机前的机器,使用该数据。
J: 基板固定方法
一般选择「外形基准」。外形基准是与顶板联动将基板固定的方法。
K: 固定开始计时
基板通过配置在主挡板前的基板检出传感器后,机器开始固定基板动作。
基板尺寸和传送速度不同,开始固定的最佳时机也不同。根据此参数,可以延迟开始固定的最佳时机。
数值输入范围 0.0 - 1.9 秒。
L: 传送开始高度
贴装后,顶针装置一下降便立即向传送带出口传送基板。如基板背面已贴有元件,顶针装置不完全下降会造成元件与装置相
碰撞的现象。通过该参数可以分别指定各种基板顶针装置的下降高度。如果将基板固定后的顶针高度作为 0mm,则输入从该
位置下降几 mm 为传送开始高度。可以在 3 〜 30mm 的范围内输入。
M: 传送带空转计时
如生产基板的形状为普通形状,设置为「0 秒」。
如生产基板为特殊形状 ( 缺口、中间镂空等 ),传送带出口传感器在运出基板时容易误识别。这时如果设置传送带空转时间,
即使基板检出传感器关闭 (OFF) 后,传送带在设置的时间内还会转动,这样就可以完成传出基板的作业。在 0.0〜 9.9 秒的
范围内输入。
N: 图像处理校正
设置为「普通校正」。因为设置为「普通校正」后,可以在吸附元件时实施图像识别检查。
O: 真空压确认
设置为「执行」。因为设置为「执行」后,可以从视觉识别和真空压确认两方面确认是否正吸附着元件。
P: 重新执行方式
选择在贴装中发生吸附、识别错误时的重新执行方式。
·「组」
继续重新执行,直至 1 个贴装组的生产完成。但不可进行贴装头的更换。
·「拼块」
如果发生了错误,完成该拼块的贴装后,由发生错误的贴装头重新执行。
·「自动」
如果发生了错误,完成该拼块的贴装后,不必由发生错误的贴装头,只需由空着的贴装头重新执行即可。
Q: 提前取料
一般设置为「不执行」。
如果设置为「执行」,当前一块基板的生产完成后,在传入下一块基板的同时就开始元件的吸附和识别。这样可以缩短生产
的单位时间。
X: 传送装置马达速度
设置传送马达 ( 基板传送 ) 的速度。以在「机器设置」画面中设置的数据为标准,10% 为单位,“+”侧最大为 50%,
“-”侧最大为 90% 的范围内设置。
Y: 送入前元件高度 (mm)
取在上道工序已经贴装的元件的最大高度来设置。
设置的高度至少要保证使贴装头在基板上移动时不与该高度的元件相碰撞。
g: 跳过重新执行
设置因元件吸附错误、元件识别错误、元件用完等原因不能使用元件时是否贴装其他可以贴装的元件。