99469_UR16e_User_Manual_zh_Global.pdf - 第146页
表 达 式 类 似 如 下 形 式 : di git al_i n[1 ] Tr ue an d a nalo g_i n[0 ]<0 .5 24 . 4 . 从 一 个 所 选 节 点 启 动 程 序 当 机 器 人 处 于 手 动 模 式 时 ( 请 参 阅 21.1 . 操 作 模 式 在 本 页 103 ) , 从 选 择 处 播 放 允 许 程 序 从 所 选 节 点 开 始 。 从 头 播 放 将 正 常 运 行 程 …
24.2.4. 复制
按钮可复制一个节点,并允许将其用于其他操作( 例如,将其粘贴到程序树的其他位置) 。
24.2.5. 粘贴
按钮可粘贴之前剪切或复制的节点。
24.2.6. 删除
点按 按钮可从程序树中移除一个节点。
24.2.7. 抑制
点按 按钮可抑制程序树上的特定节点。
程序运行时将会直接跳过被抑制的程序行。被抑制的程序行也可以解除抑制。使用这种方法
可以快速更改程序,而且确保不破坏原始内容。
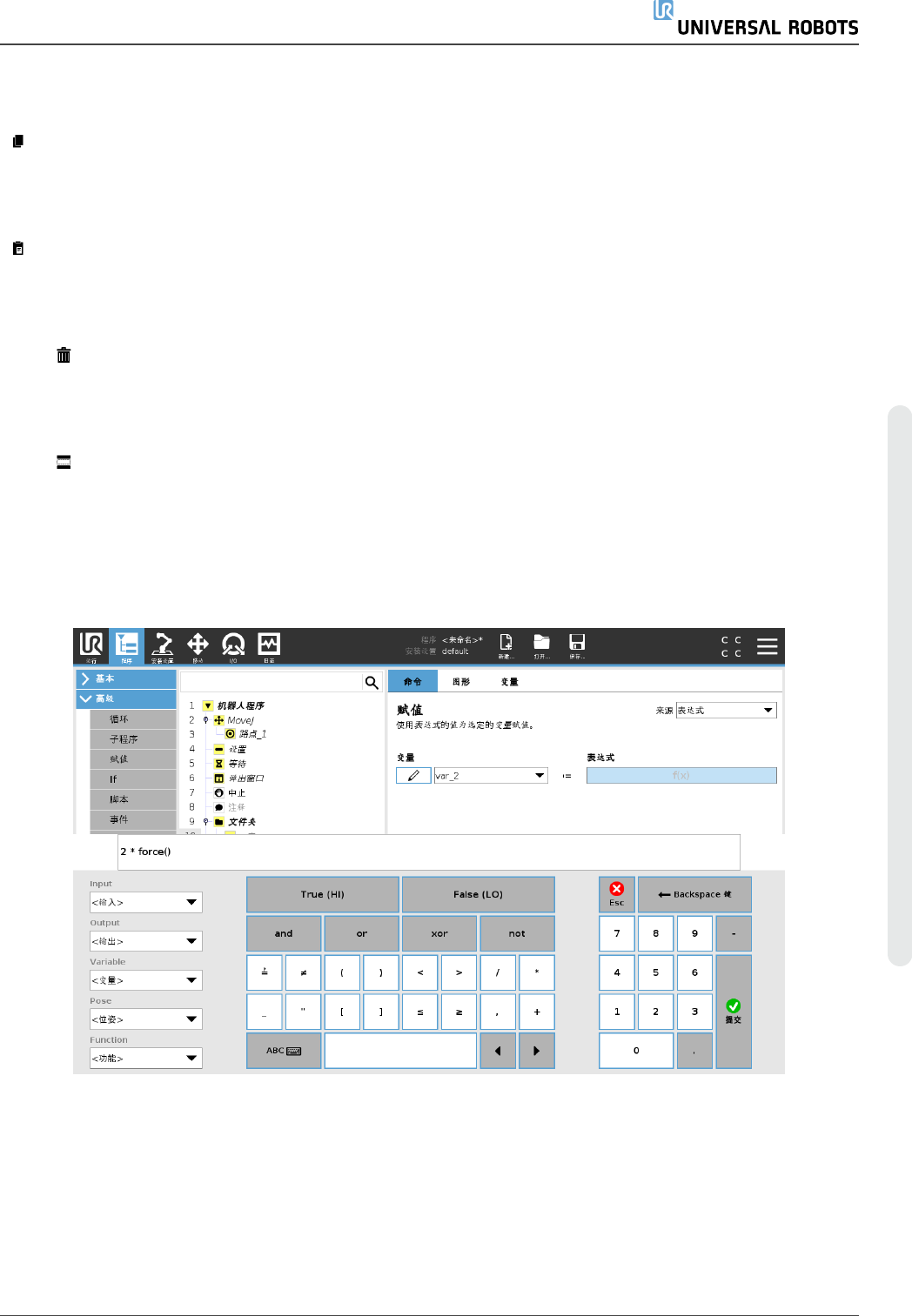
24.3. 表达式编辑器
虽然表达式本身是以文本形式进行编辑,但表达式编辑器也提供了许多按钮和函数,可用于
插入特殊表达式符号,例如,表示相乘的 * 符号和表示小于等于的 ≤ 符号。使用屏幕左上角的
键盘符号按钮可切换至表达式文本编辑模式。可以在Variable selector, while the names of the
input and output ports can be found in the Input and Output selectors. Some special functions are
found in Function中找到所有已定义的变量。
按“确定”按钮时,系统将检查表达式是否存在语法错误。按“取消”按钮将离开屏幕,放弃所有
更改。
用 户 手 册 131 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
表达式类似如下形式:
digital_in[1] True and analog_in[0]<0.5
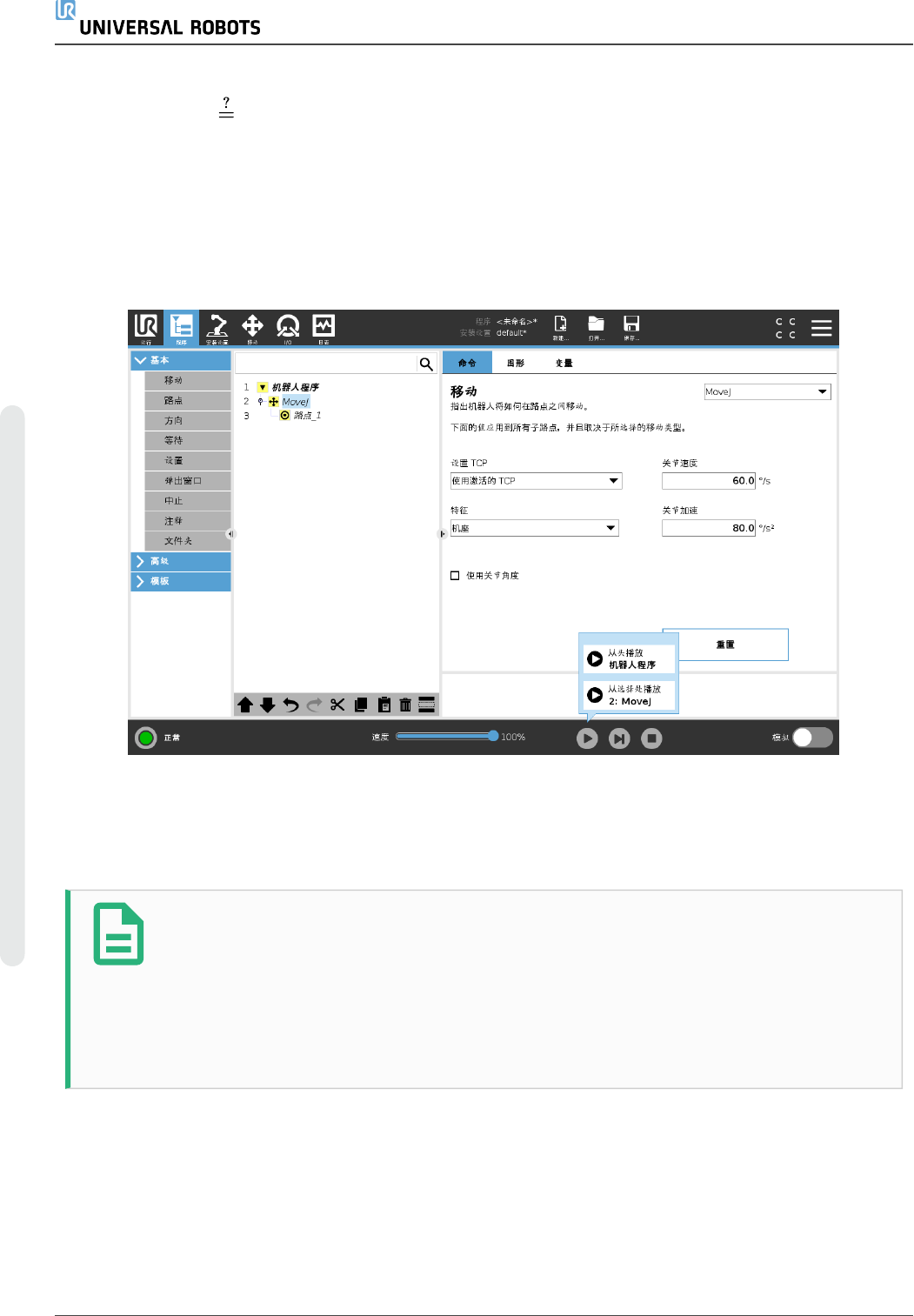
24.4. 从一个所选节点启动程序
当机器人处于手动模式时( 请参阅21.1. 操作模式 在本页103) ,从选择处播放允许程序从所选
节点开始。从头播放将正常运行程序。如果无法从特定节点运行程序,从选择处播放选项将被
禁用。无法使用线程启用从选择播放,因为线程始终从头开始。
24.4.1. 使用从选择播放
点按播放并选择从选择处播放可从程序树中的某一个节点运行程序。
提示
• 始终为从选择处播放和从头播放执行开始前选项( 如果使用) 。
• 如果遇到未分配的变量,程序将停止并显示错误消息。
• 程序只能从机器人程序中的一个节点启动。
• 从选择处播放可在子程序中使用。子程序结束时,程序执行停止。
24.5. 在程序中使用断点
断点会暂停程序执行。您可以使用断点在特定点暂停和恢复程序,以检查机器人位置、变量
等。请参阅21.1. 操作模式 在本页103。
1. 在程序树中,点击行号以设置或清除断点。
UR16e 132 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
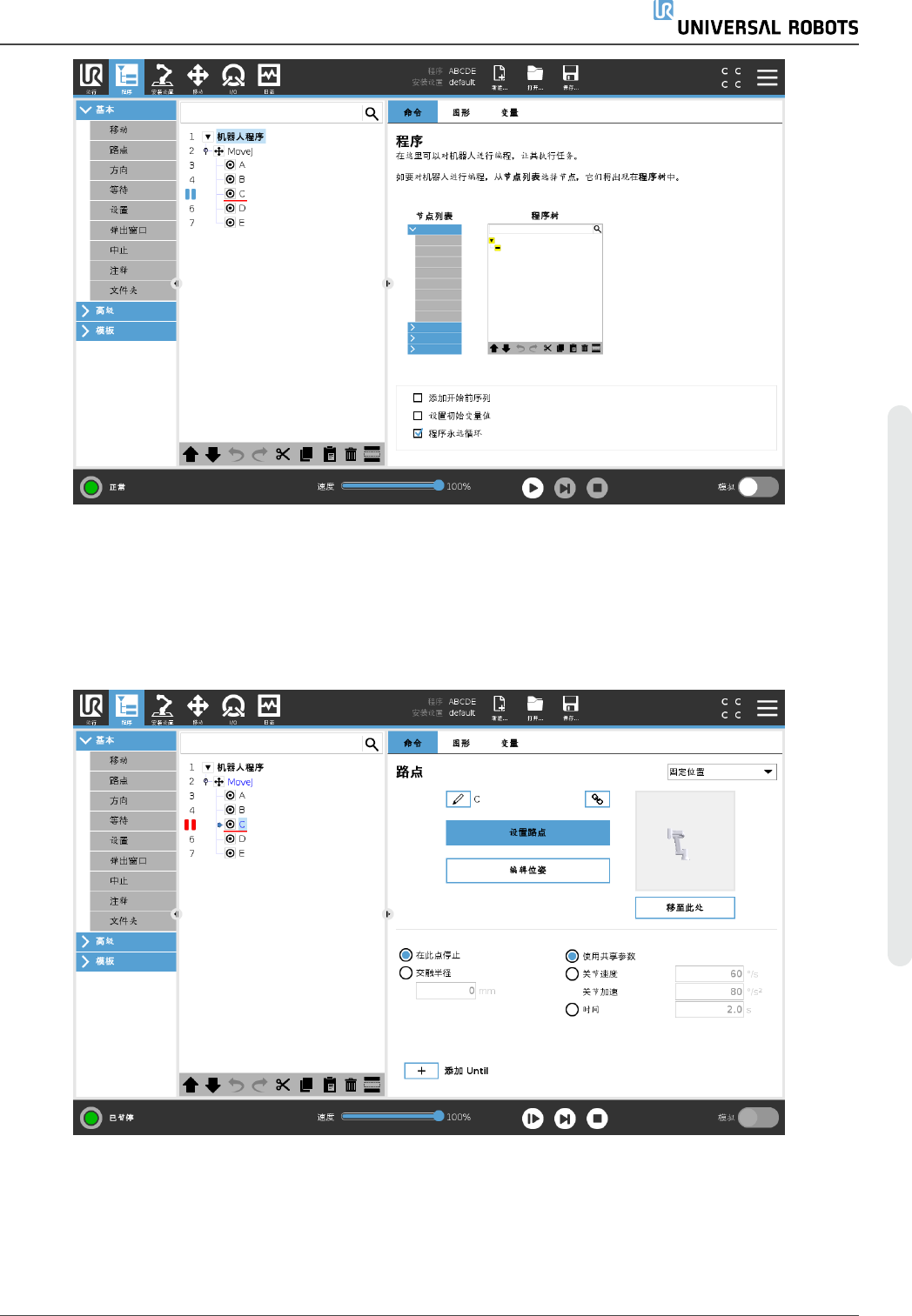
不管是节点上方或下方的红线均表示设置了断点以暂停执行。除下述情形以外,大多数节点
在执行之前会暂停:
• 路点:在机器人到达此路点时,路点节点上的断点将忽略交融并暂停程序。
• Until 节点:一旦满足 Until 条件,Until 节点上的断点将暂停程序。不会忽略直到节点中使
用的交融命令。当机器人达到交融半径时就会暂停。
用 户 手 册 133 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。