99469_UR16e_User_Manual_zh_Global.pdf - 第228页
连 接 状 态 TC P 连 接 状 态 。 响 应 时 间 [ms ] 发 送 mo dbus 请 求 和 收 到 响 应 之 间 的 时 间 - 仅 当 通 信 处 于 激 活 状 态 时 才 更 新 。 Mo dbu s 数 据 包 错 误 收 到 的 包 含 错 误 的 数 据 包 数 ( 即 长 度 无 效 、 数 据 丢 失 、 TC P 套 接 字 错 误 ) 。 超 时 未 得 到 响 应 的 mo dbu s 请 求 …

25.19.11. 信号值
此处显示信号的当前值。对于寄存器信号,信号值以无符号整数表示。对于输出信号,可以使
用按钮设置所需的信号值。同样,对于寄存器输出信号,所提供的要写入设备的信号值也必须
是无符号整数。
25.19.12. 信号连接状态
此图标显示是否可正确读取/写入信号( 绿色) 、设备是否做出意外响应或是否无法检测到设备
( 灰色) 。如果收到 MODBUS 异常响应,将显示响应代码。MODBUS-TCP 异常响应为:
E1
非法功能 (0x01) 询问所收到的功能代码是服务器( 或从设备) 不允许的动作。
E2
非法数据地址 (0x02) 询问所收到的功能代码是服务器( 或从设备) 不允许的动作,检查输
入的信号地址是否对应远程 MODBUS 服务器的设置。
E3
非法数据值 (0x03) 询问所包含的值是服务器( 或从设备) 不允许的动作,检查输入的信号
值对于远程 MODBUS 服务器上的指定地址是否有效。
E4
从设备故障 (0x04) 服务器( 或从设备) 在尝试执行所请求的动作时发生不可恢复的错误。
E5
应答 (0x05) 专用信息已与编程命令一起发送至远程 MODBUS 设备。
E6
从设备忙 (0x06) 专用信息已与编程命令一起发送至远程 MODBUS 设备,从设备( 服务器)
现在无法响应。
25.19.13. 显示高级选项
此复选框可显示/隐藏每个信号对应的高级选项。
25.19.14. 高级选项
更新频率
此菜单可用于更改信号的更新频率。更新频率是指向远程 MODBUS 设备发送请求来读取
或写入信号值的请求频率。当频率设置为 0 时,将使用
modbus_get_signal_status
、
modbus_
set_output_register
和
modbus_set_output_signal
脚本函数按需启动 modbus 请求。
从设备地址
此文本字段可用于为与特定信号对应的请求设置具体的从设备地址。该值必须在 0-255 范
围内( 包括 0 和 255) ,默认值为 255。若要更改此值,建议您首先查阅远程 MODBUS 设备
手册,验证从设备地址更改后的功能正常。
重新连接计数
TCP 连接被关闭并重新连接的次数。
用 户 手 册 213 UR16e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
连接状态
TCP 连接状态。
响应时间 [ms]
发送 modbus 请求和收到响应之间的时间 - 仅当通信处于激活状态时才更新。
Modbus 数据包错误
收到的包含错误的数据包数( 即长度无效、数据丢失、TCP 套接字错误) 。
超时
未得到响应的 modbus 请求数。
请求失败
由于插座状态无效而无法发送的数据包数。
实际频率
客户端( 主) 信号状态更新的平均频率。每次信号从服务器( 或从设备) 接收到响应时,重新
计算此值。
所有计数器最多可达 65535,然后回到 0。
25.20. EtherNet/IP
EtherNet/IP 是一种网络协议,可将机器人连接到工业 EtherNet/IP 扫描仪设备。
如果启用了连接,则可以选择当程序失去 EtherNet/IP 扫描仪设备连接时发生的操作。
可选项如下:
无
PolyScope 将忽略 EtherNet/IP 连接断开的情况,并继续运行程序。
暂停
PolyScope 暂停当前程序。程序从停止处继续执行。
停止
PolyScope 停止当前程序。
25.21. PROFINET
PROFINET 是一种网络协议,可启用或禁用机器人与工业 PROFINET IO 控制器的连接。
如果启用了连接,则可以选择当程序与 PROFINET IO 控制器断开连接时发生的操作。
可选项如下:
无
PolyScope 将忽略 PROFINET 连接断开的情况,并继续运行程序。
暂停
PolyScope 暂停当前程序。程序从停止处继续执行。
停止
PolyScope 停止当前程序。
UR16e 214 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
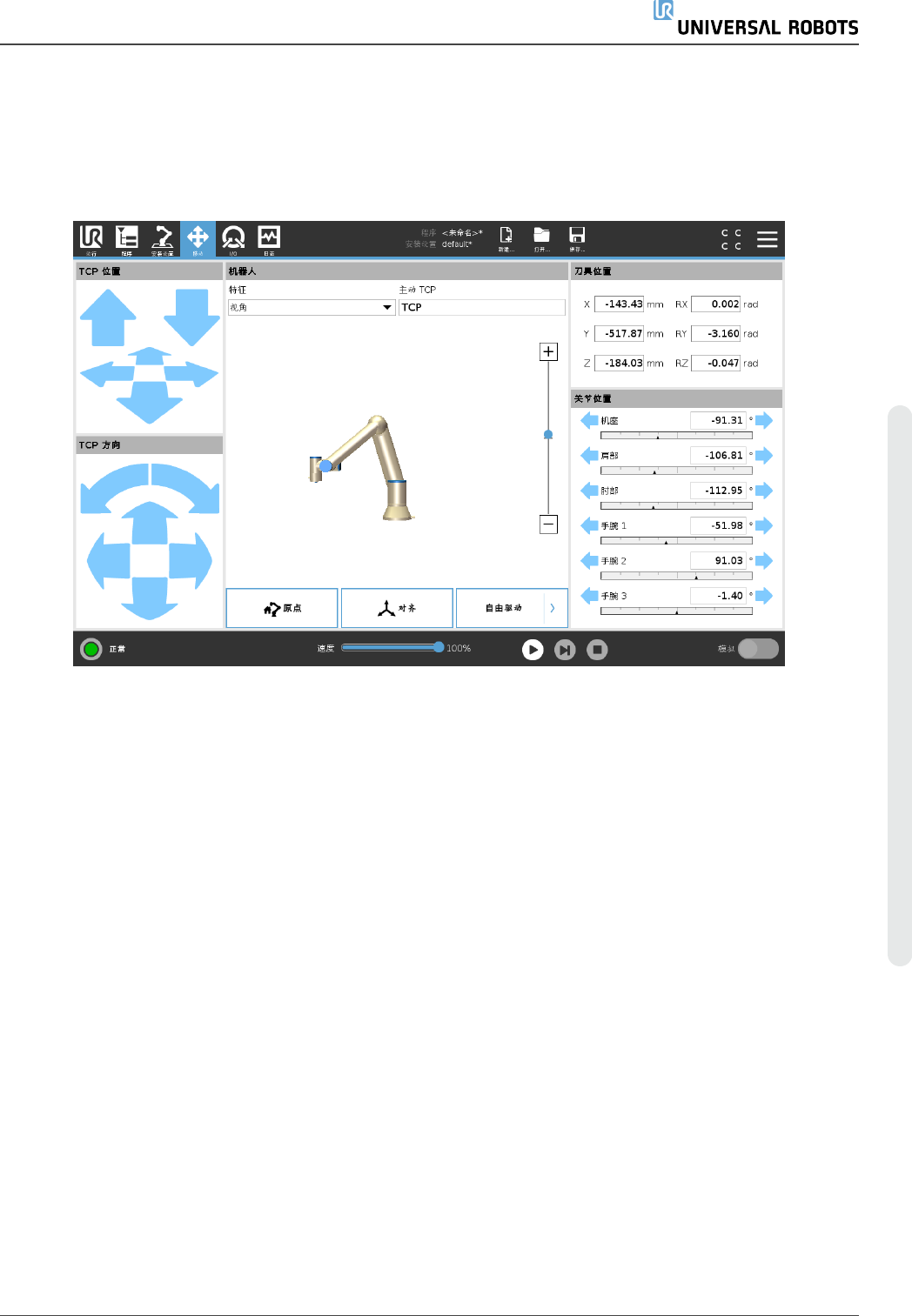
26.移动选项卡
在此屏幕上,您可以通过平移/旋转机器人工具或单独移动机器人关节来直接移动( 缓慢移动)
机器人手臂 。
26.1. 移动工具
按住任何移动工具箭头以特定方向移动机器人手臂。
• 平移箭头( 上部) 可按指示的方向移动机器人工具头。
• 旋转箭头( 下部) 可按指示的方向改变机器人工具的方向。旋转点即工具中心点 (TCP),
也即位于机器人手臂末端、用于提供机器人工具特征点的点。TCP,在图中以蓝色小球
表示。
26.2. 机器人
如果机器人 TCP 的当前位置距离安全平面或触发平面很近,或者机器人工具的方向接近工具
方向边界限值( 请参阅22.11. 平面 在本页112) ,则会显示相邻边界限值的 3D 表示。如果机器
人正在运行程序,则边界限值的可视化将被禁用。
安全平面以黄色和黑色显示,并带有一个表示平面法线的小箭头,指示平面这一侧允许放置
机器人 TCP。触发平面以蓝色和绿色显示,并带有一个指向平面一侧的小箭头,在这一侧,正
常模式限值( 请参阅22.8. 安全模式 在本页111) 处于激活状态。工具方向边界限值以锥体呈
现,带有一个指示机器人工具当前方向的矢量。锥体内侧代表工具方向的允许区域( 矢量) 。
当机器人 TCP 不再接近限值时,3D 成像消失。如果 TCP 侵犯边界限值或接近边界限值,则成
像会变成红色。
用 户 手 册 215 UR16e
26.移 动选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。