0197787-01_UM_HeadVerification_708_EN.pdf - 第48页
SIPLACE Head V erification User Manual Edition 01/2015 48 4.8 "Head End urance Ru n LS" Measure ment The following too ls are required for these m easurem ents: CPP: 12x no zzle type 2057 03070280- 01 (calibrat…
SIPLACE Head Verification
User Manual Edition 01/2015
47
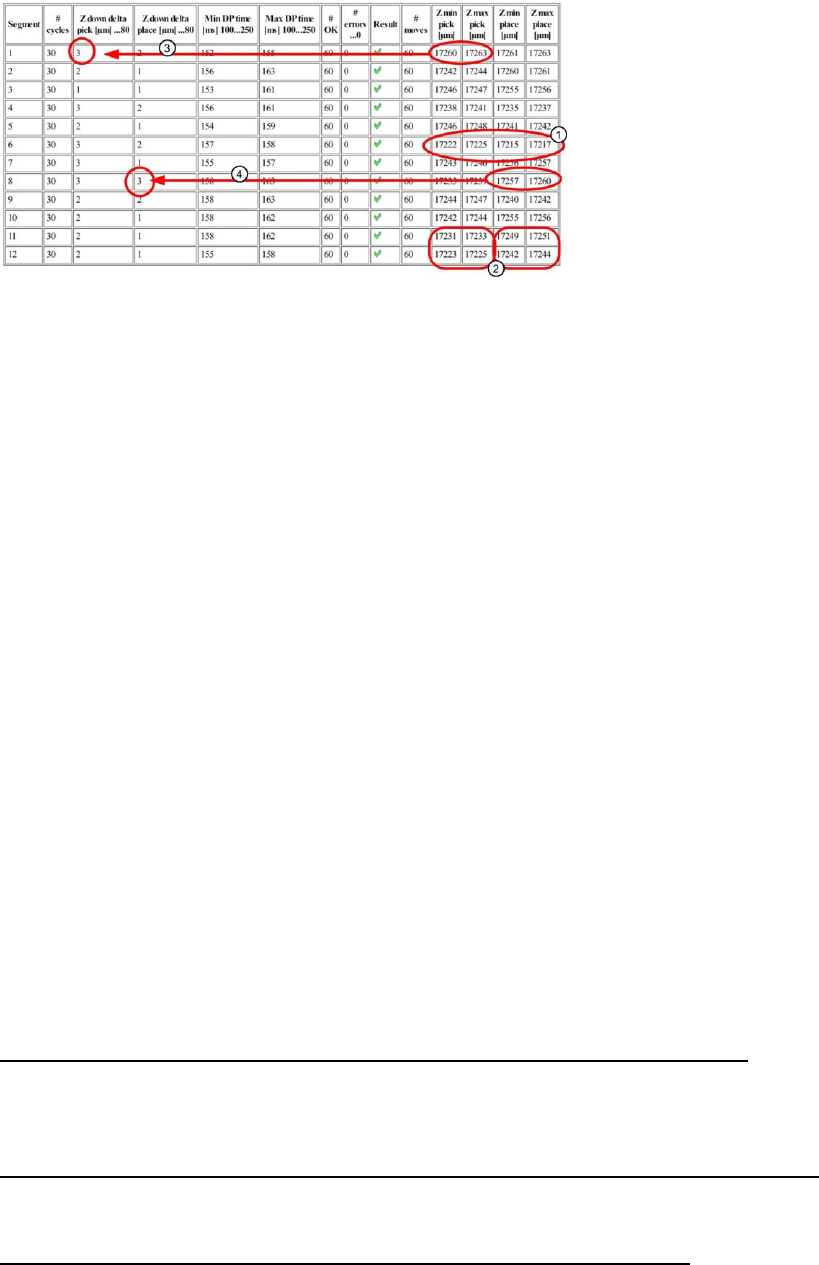
Figure 31: Results PDF for head endurance run 01005_2
Point 1:
The "Z down pick min/max" and "Z down place min/max" diagrams, plus the corresponding
measurements in the table, indicate that segment 6 deviates from all other segments both during
pickup and during placement! During both movements, this segment was not able to move so far
downwards as the other segments.
This may be due to a linear guide which has difficulty moving at this segment.
Point 2:
The "Z down pick min/max" and "Z down place min/max" diagrams, plus the corresponding
measurements in the table, indicate that segments 11 and 12 deviate significantly between pickup and
placement. The Z axis does not move as far downwards during pickup as it does during placement.
One possible cause could be that the DP linear guide have difficulty moving and that the segment or
DP linear guide may soon need replacing.
Point 3:
We can see here how the "Z down delta pick [ms]" value is calculated using the two threshold values
"Z min pick [ms]" and "Z max pick [max]". A value which is leaning towards the upper threshold (in this
example 80µm) indicates a problem with the linear guide for that segment.
Point 4:
We can see here how the "Z down delta place [ms]" value is calculated using the two threshold values
"Z min place [ms]" and "Z max place [max]". A value which is leaning towards the upper threshold (in
this example 80µm) indicates a problem with the linear guide for that segment.
4.7.4 Meaning of the Results
"Z down delta pick [µm]" and "Z down delta place [µm]" errors at all segments:
1. Z motor defective Replace Z motor
2. Z motor linear guide has difficulty moving Replace Z motor
3. Read unit of Z motor is dirty Clean the read unit
"Z down delta pick [µm]" and "Z down delta place [µm]" errors at individual segments:
1. DP linear guide has difficulty moving Replace DP
2. Linear guide for segment has difficulty moving Replace linear guide for segment
"Min DP time [ms]" or "Max DP time [ms]" errors at individual segments:
1. Internal DP/segment problem Replace DP/segment

SIPLACE Head Verification
User Manual Edition 01/2015
48
4.8 "Head Endurance Run LS" Measurement
The following tools are required for these measurements:
CPP: 12x nozzle type 2057 03070280-01 (calibration nozzle)
CP20P: 20x nozzle type 4235 03098748-01 (calibration nozzle)
CP20A: 20x nozzle type 1235 03015222-01 (calibration nozzle)
4.8.1 Explanation of Measurement – Procedure
The "Head endurance run LB" measurement is used to determine the actual position deviations of the
Z axis and the minimum and maximum path of the segments during pickup and placement. The DP
drive positioning times for a rotation from 0° to 180° are documented and can be used to evaluate the
DP quality.
The results of these measurements provide feedback about the following sources of errors:
1. Difficult movement of DP drives
2. State of Z motor linear guides
3. State of DP/segment linear guides
4. Assembly and state of cover switching ring
5. State of Z-down light barrier
Measurement steps:
1. The head is positioned over the height reference run position on the fixed conveyor side.
2. Segment 1 is rotated by the star into the placement position.
3. The Z axis is moved downwards using travel profile TP5 [TP5 LIGHT BARRIER] and the
pickup procedure is simulated. As soon as the Z-down light barrier issues the end position
signal, the end signal position value will be saved as Z Pick [µm].
4. During the downwards movement, the DP is also positioned at 0°. This gives a positioning
time of DP time [ms].
5. The Z axis now moves back up again with travel profile TP1.
6. The Z axis is moved downwards for placement using travel profile TP5 [TP5 LIGHT
BARRIER]. As soon as the Z-down light barrier issues the end position signal, the end signal
position value will be saved as Z Place [µm].
7. During the downwards movement, the DP is also positioned at 180°. This gives a positioning
time of DP time [ms].
8. The Z axis now moves back up again with travel profile TP1.
9. This procedure is now executed 50x for segment 1, which means a total of 100x Z axis
movements (50x pickup / 50x place) and also 100x DP positioning times.
10. All pickup positions Z-Pick [µm] are saved internally and the minimum (Z min pick [µm]) and
maximum (Z max pick [µm]) positions are used for the analysis.
11. All placement positions Z-Place [µm] are saved internally and the minimum (Z min place
[µm]) and maximum (Z max place [µm]) positions are used for the analysis.
12. The positioning times for rotation of each segment by 180° are also analyzed, to provide a
minimum (Min DP Time [ms]) and maximum (Max DP Time [ms]) value for each segment.
13. The star now turns segment 2 into the placement position
14. Measurements 3-13 are now performed for all other segments.

SIPLACE Head Verification
User Manual Edition 01/2015
49
4.8.2 Explanation of Measurement Results in "Progress" Menu
After completion of the measurement, the following results appear in the "Progress" menu:
Figure 32: Head endurance run LS _1 result
Figure 33: Head endurance run LS _2 result
Legend:
1. Segment measured
2. Total number of cycles
3. Value determined Z down delta pick [µm]
This value is calculated by finding the difference between the lowest (Z min pick [µm] (11))
and the highest (Z max pick [µm] (12)) Z axis positioning value after switching the Z-down
light barrier during the pickup cycles.
This value must be within a plausible tolerance (in this case 0..150µm)!
Z down delta pick [µm] = Z max pick [µm] - Z min pick [µm]
4. Value determined Z down delta place [µm]
This value is calculated by finding the difference between the lowest (Z min place [µm]
(13)) and the highest (Z max place [µm] (14)) Z axis positioning value after switching the Z-
down light barrier during the pickup cycles.