Micron Technical Reference V9 Volume 1.pdf - 第173页
MACHINE CONTROL CAN BUS Chapter Issue 12, Feb 18 Technical Reference Manual 7.29 For the CAN Bus to work correctly , the CAN Bus must be terminated using a CAN T erminator . The CAN T erminator is fitted to the output co…
MACHINE CONTROL
CAN BUS
7.28 Technical Reference Manual Chapter Issue 12, Feb 18
CAN BUS
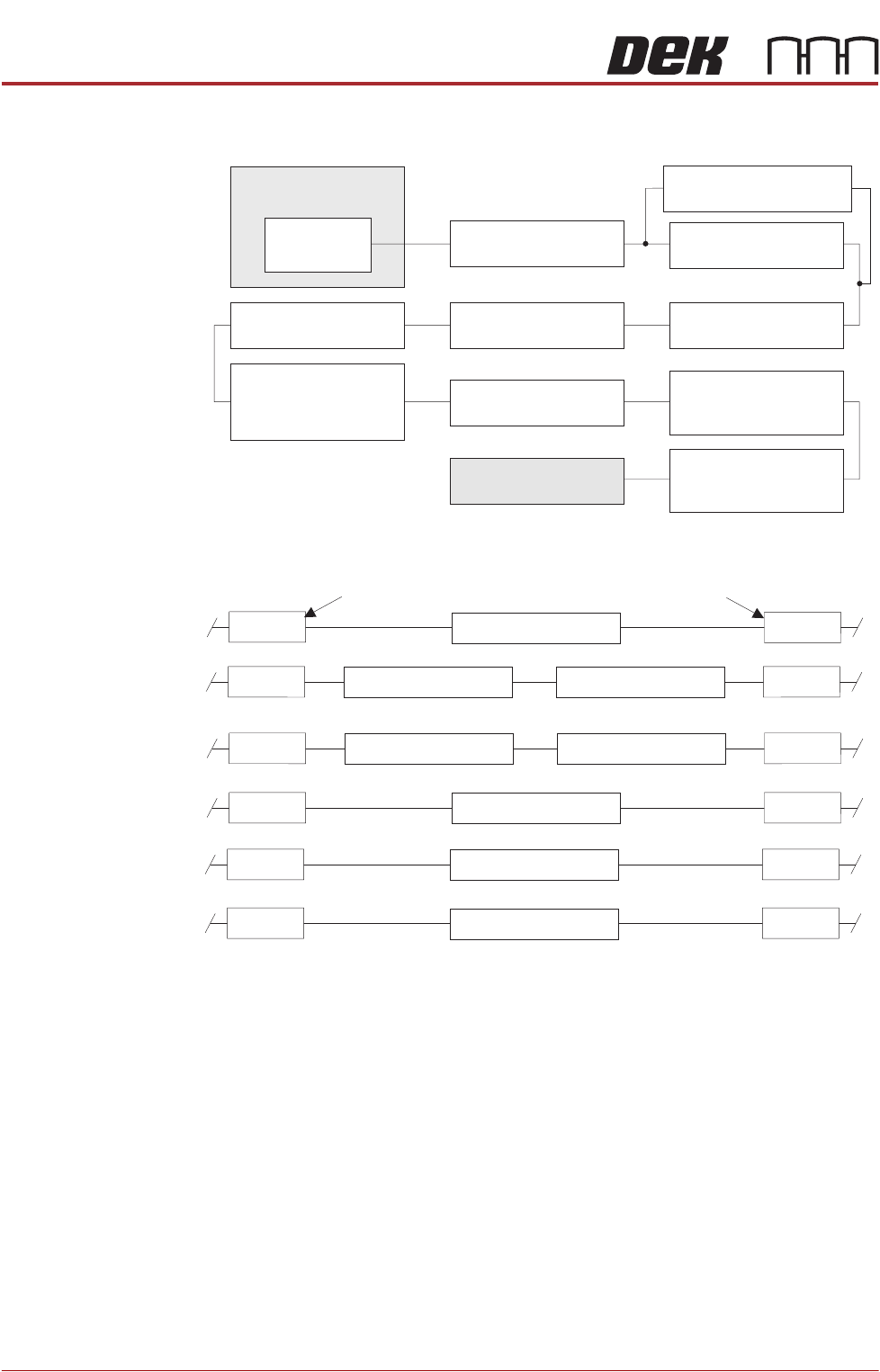
Figure 7-6 CAN Bus
Figure 7-7 CAN Bus (Optional Rail Nodes)
The Controller Area Network (CAN) is a bus system for machine motion control.
An encoder/decoder for the 500Kbit/s rate CAN serial link is fitted to the
NextMove ES card to enable communication with the CAN Nodes. The CAN is
a 2-wire data link designed for transmission of small data packets for fast update
of axis position information.
The CAN Bus connects the NextMove ES card to the Nodes that provide
machine motion, switch functions and sensor feedback. There are two different
types of Nodes:
• I/O Node Boards
• Servo/Stepper Nodes
M36 Machine
Control Enclosure
NextMove ES
(I/O Node 1)
Stepper Node 10
Paste Dispense Motor
I/O Node 3 Board
Print Carriage I/O
Servo Node 7
Print Carriage Motor
I/O Node 2 Board
Main Machine I/O
I/O Node 4 Board
Screen Cleaner I/O
Various Nodes
depending on optional
rail system fitted
(see Rail Nodes Figure)
CAN Terminator
Servo Node 8
Camera X Motor
(Rotary Motors Only)
Servo Node 9
Camera Y Motor
(Rotary Motors Only)
Servo Node 6
Rising Table Motor
Servo Node 31
ProFlow Paste Condition
Node 2
Node 2
Node 2
Node 2
Node 2
Node 2
Node 4
Screen Clean IO
Part MMI
Node 4
Node 4
Node 4
Node 4
Node 4
Dual Lane Option
RTC Option (Left to Right)
RTC Option (Right to Left)
OTS/HTC Option
TRS Option
Thin Wafer Pallet
Stepper Node 15
Servo Node 11Stepper Node 12
Servo Node 16Stepper Node 12
I/O Node 5
I/O Node 19
I/O Node 17
MACHINE CONTROL
CAN BUS
Chapter Issue 12, Feb 18 Technical Reference Manual 7.29
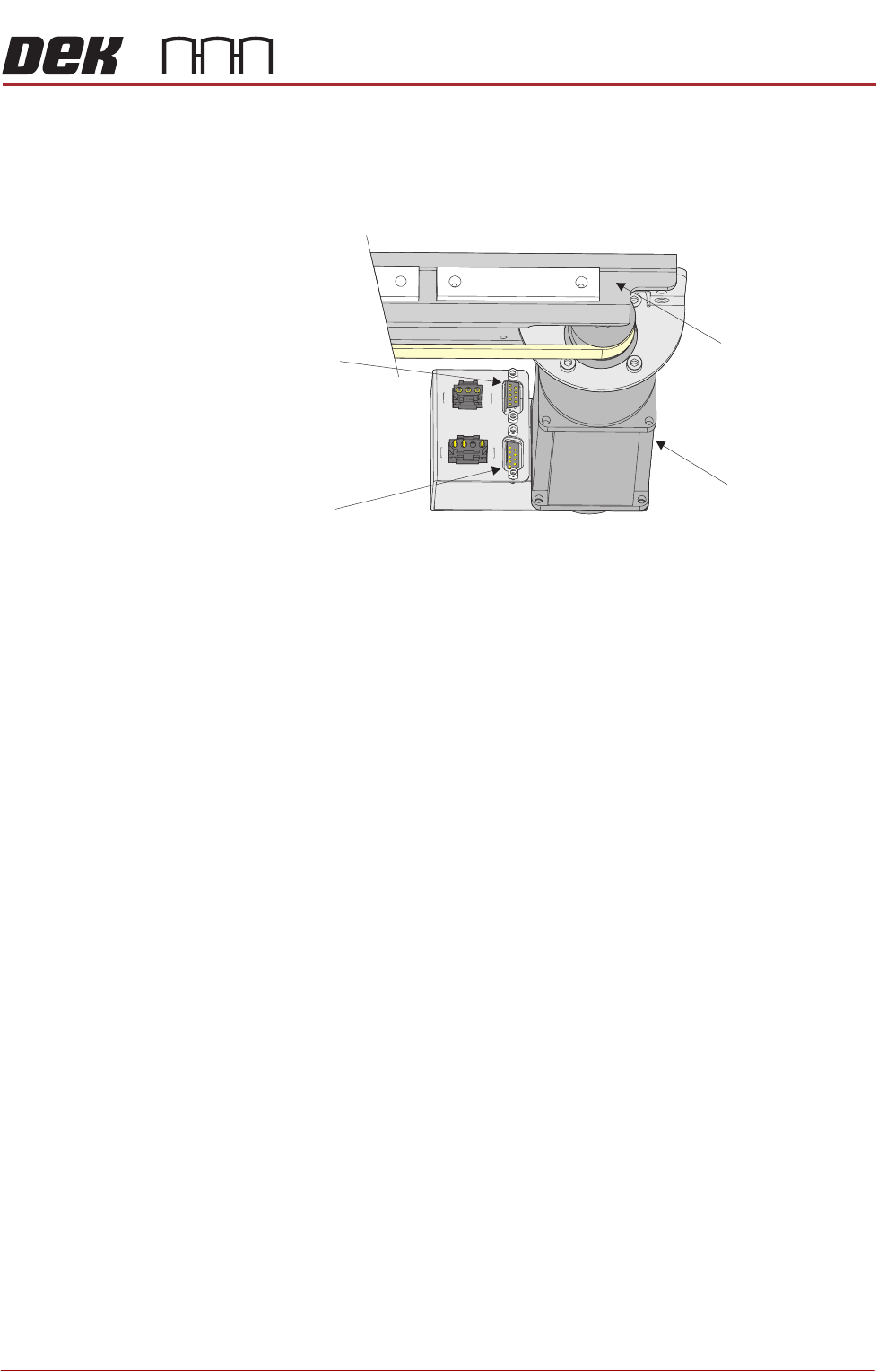
For the CAN Bus to work correctly, the CAN Bus must be terminated using a
CAN Terminator. The CAN Terminator is fitted to the output connector of the last
node in the CAN Bus line and consists of a 9 pin D type connector with a link
resistor fitted inside the connector hood.
Figure 7-8 CAN Terminator Connection
Camera X Motor
(Servo Node 8)
Camera CarriageConnector for
CAN Terminator
Connector for
CAN Bus Input
View on Front Right of Camera Carriage (Rotary Motors Only)
MACHINE CONTROL
CAN BUS
7.30 Technical Reference Manual Chapter Issue 12, Feb 18
I/O Node Boards
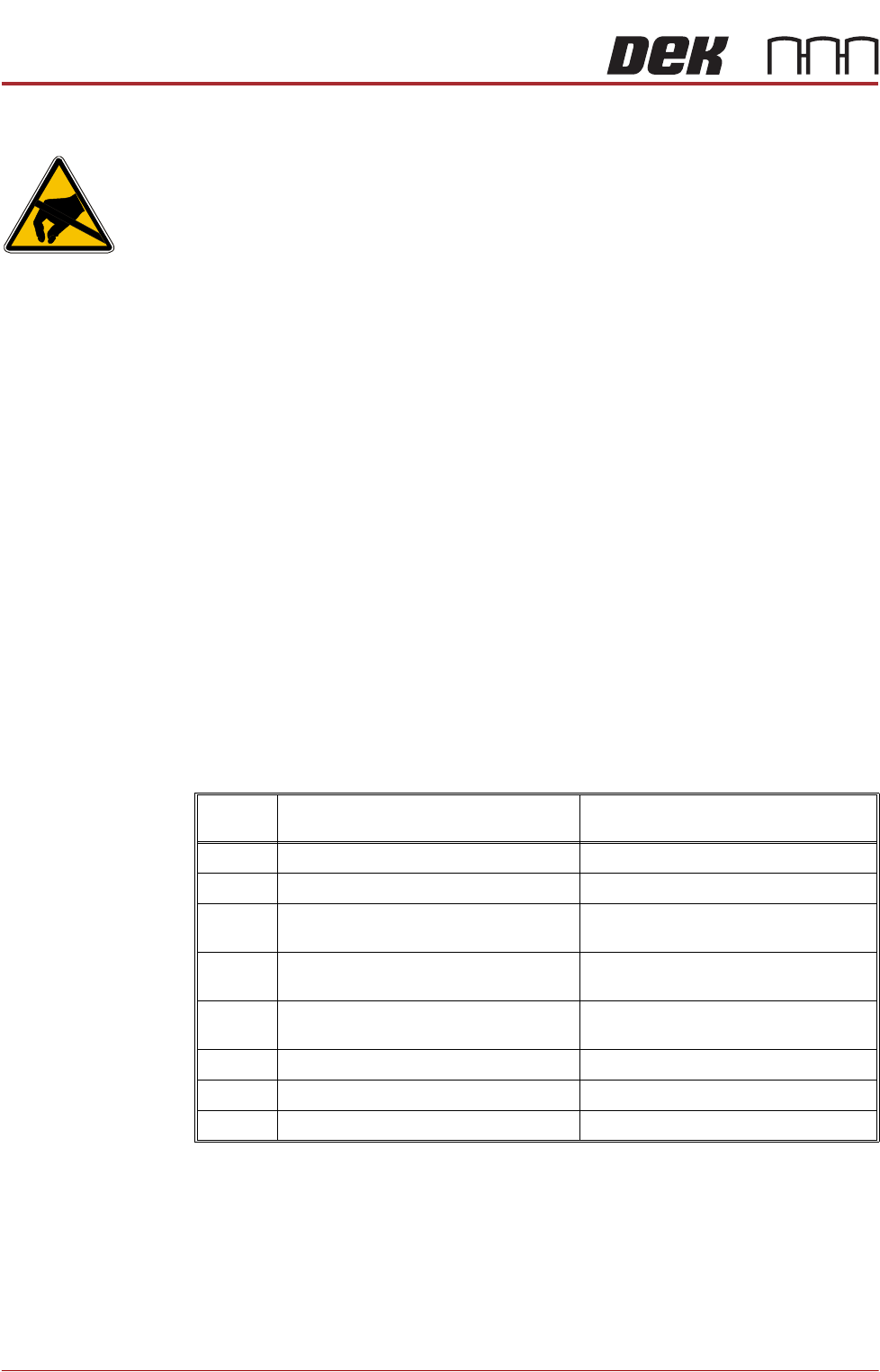
CAUTION
ANTI-STATIC HANDLING. STANDARD PRECAUTIONS MUST BE ADHERED TO
WHEN HANDLING ELECTRONIC CARDS AND CONFIGURING AND INSERTING
INTO THE ENCLOSURES.
The I/O Node Boards consists of multiple inputs and outputs, CAN encoder/
decoder and multi-way connectors for machine components.
There are three I/O Node Boards fitted to a standard machine with a possible
one other board for the underscreen cleaner, if fitted, these are:
• I/O Node 1 - NextMove ES card (CAN master) located in the M36 Machine
Control Enclosure (standard)
• I/O Node 2 - Main Machine I/O board located at the rear of the machine
(standard)
• I/O Node 3 - Print Carriage I/O board located inside the print carriage
extrusion (standard)
• I/O Node 4 - Screen Cleaner I/O board located at the rear of the machine
(optional)
• I/O Node 5 - OTS/HTC I/O board located at the rear of the machine
(optional)
I/O Nodes 2, 4 & 5 have a green (status) and a red (error) LED mounted on the
board. The status LED should flash twice periodically and the error LED should
not be illuminated during normal operation. The following table describes other
operations of the LEDs:
I/O Node 1 I/O Node 1 is the CAN master and is also known as the NextMove ES card
housed in the M36 Machine Control Enclosure. For more information, refer to
the M36 Machine Control Enclosure - NextMove ES Card section of this
chapter.
No of
Pulses
Red (error) LED Green (status) LED
Static Off No error Initialisation/Code execution stopped
1 Node ID from DIP switches is 0 CANopen NMT state is ‘pre-operational’
2 EEPROM contents invalid (EEPROM
empty/checksum error)
CANopen NMT state is ‘operational’
3 EEPROM access impossible (hardware
error)
CANopen NMT state is ‘stopped’
4 CAN controller switched to ‘bus-off’
mode
N/A
5 Firmware error N/A
6 Controller overload N/A
Static On Severe hardware/software error N/A