TR7500E_Manual_ch_v28.pdf - 第216页
第 三 章、 A T PG 功 能 介紹 T R 7500 E 使用手冊 2 08 個 好 的 IC 腳 影 像 當 樣 本 , 再 將 待 測元件與 之 比 對 。 l 檢測參數設定畫面 n S i m i l a r i t y – 待 測影 像 與標 準 影 像 之相 似 度標 準 n S h i f t X – 待 測元件 之 X 方向 位 移 的容 許 程度 n S h i f t Y – 待 測元件 之 Y 方向 位 移 的…
第三章、ATPG 功能介紹
TR7500E 使用手冊
207
11.1.3. 方法三(Method 3)–投影特徵比對
l 將影像的灰階投影至兩軸後,以其投影的圖形作為比對的特徵。[Align]框即
是使用此方法作比對。
11.2. 檢測原理與參數設定
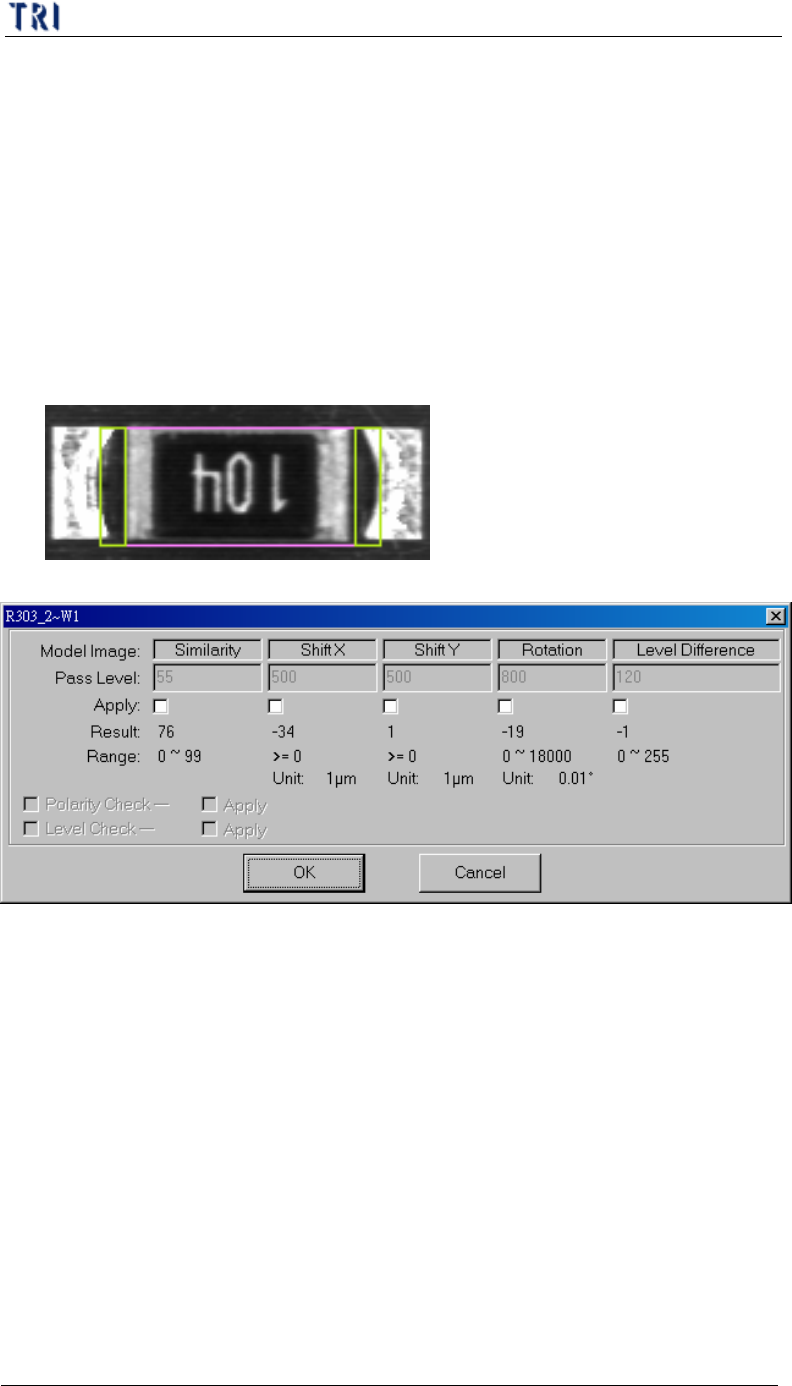
11.2.1. Model image (Missing/Missing Polarity)
l 用來檢查零件之缺件、損件、偏移、立碑、極性。本檢測框採用影像幾何學
特徵比對之原理(方法一),擷取一個好的影像當樣本,再將待測元件與之比
對。[Missing Polarity]框會將旋轉 180 度的影像會判定為瑕疵,但[Missing]
框會判定為通過。
l 檢測參數設定畫面
n Similarity – 待測影像與標準影像之相似度標準
n Shift X – 待測元件之 X 方向位移的容許程度
n Shift Y – 待測元件之 Y 方向位移的容許程度
n Rotation – 待件元件之旋轉角度的容許程度
n Level difference – 系統會檢測[Missing]框正中央 10x10 畫素區域的灰階
平均值。舉例而言,若標準元件對於灰階值學習的結果為 100,而參數
設定為 35,表示待測元件的檢測結果若大於 135 或小於 65 都會顯示為
瑕疵。
n Polarity Check – 勾選表示若元件旋轉 180 度會判定為缺陷。
n Level Check – 勾選表示[Level Difference]功能開啟。
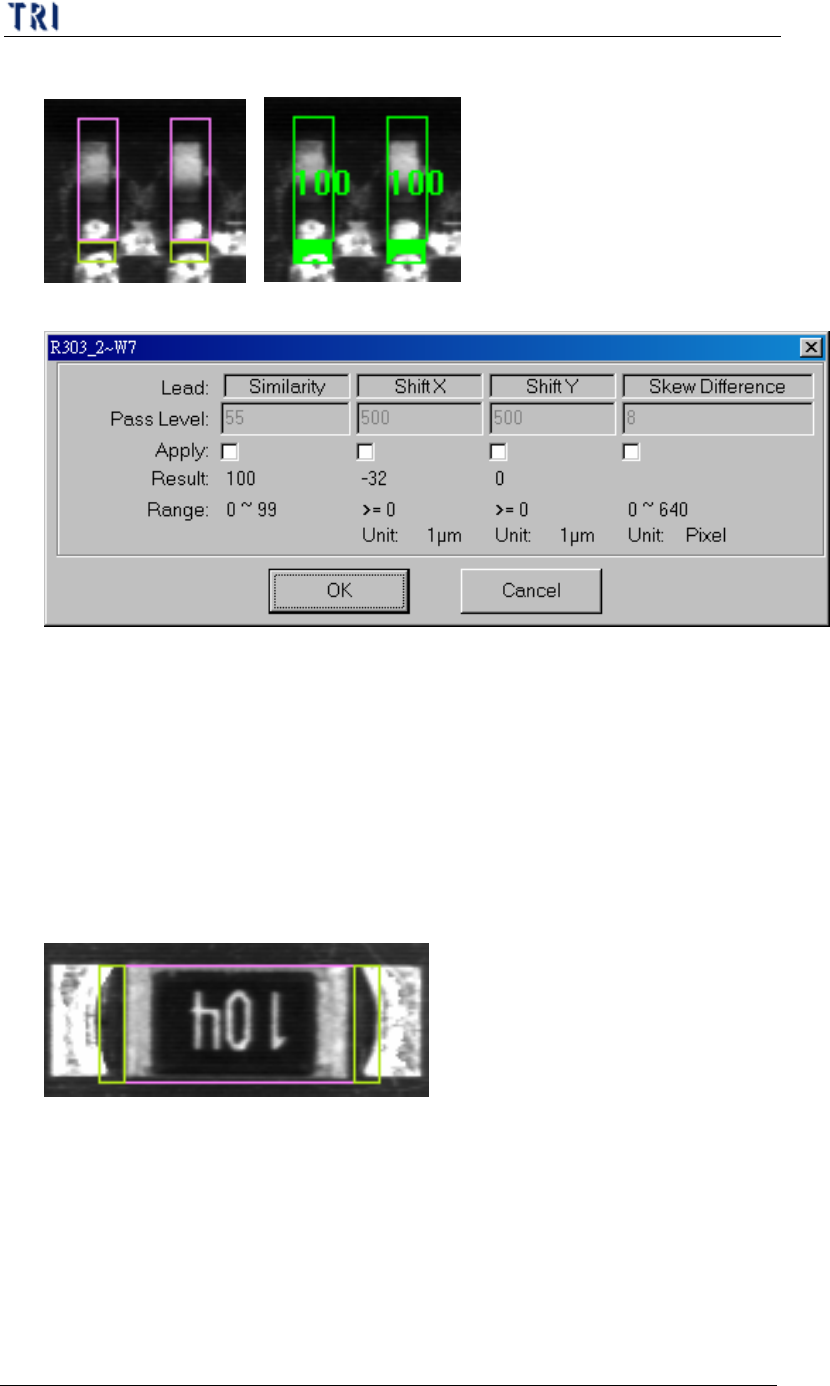
11.2.2. Lead
l 用來檢查IC 腳之缺件、偏移、腳彎。採用方法二之影像比對方式,擷取一
第三章、ATPG 功能介紹
TR7500E 使用手冊
208
個好的 IC 腳影像當樣本,再將待測元件與之比對。
l 檢測參數設定畫面
n Similarity – 待測影像與標準影像之相似度標準
n Shift X – 待測元件之 X 方向位移的容許程度
n Shift Y – 待測元件之 Y 方向位移的容許程度
n Skew Difference – 相鄰兩個[Lead]框之間的高低差的容許程度
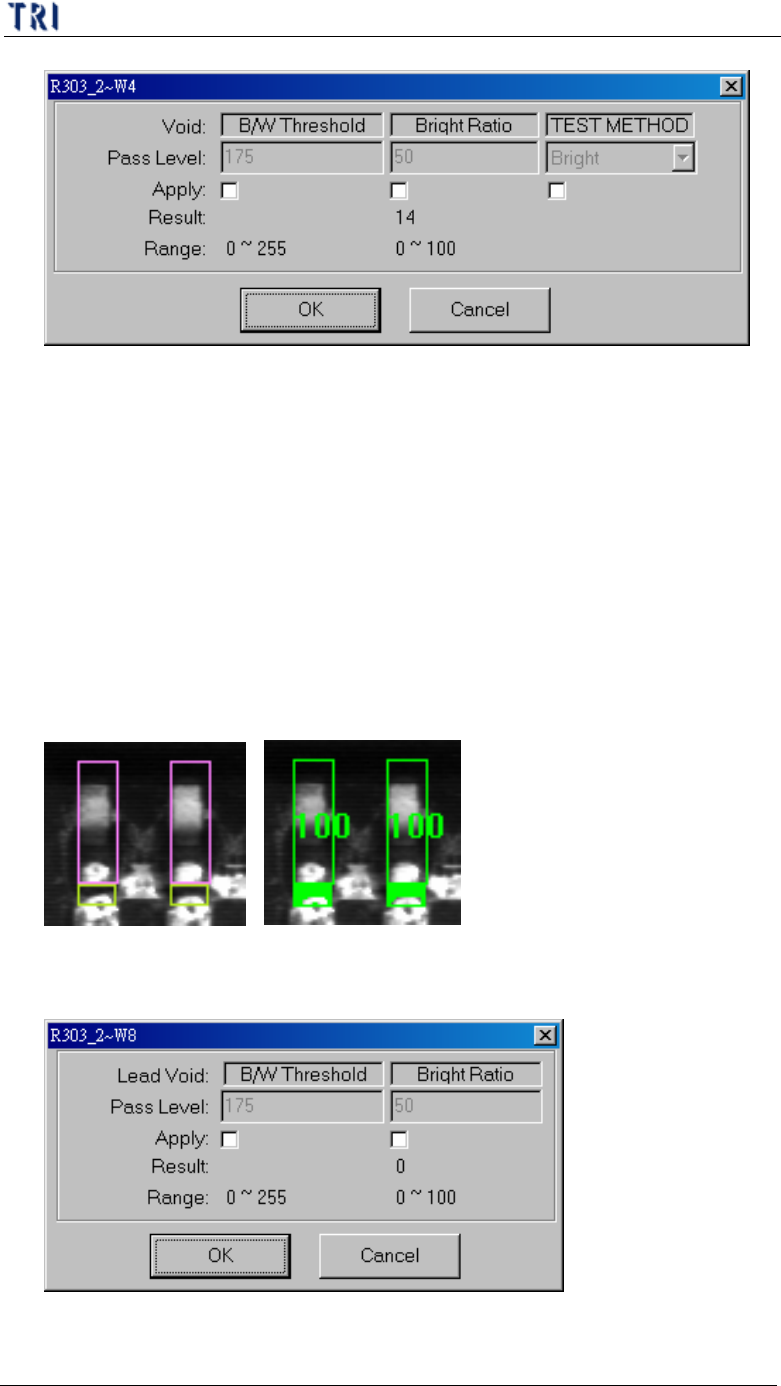
11.2.3. Void
l 此檢測框是用來檢查元件的空焊、缺件、極性。利用灰階值(0-255)來設定門
檻值及所佔比例來判斷是否通過檢測,且可以設定檢測框是要抓亮還是抓
暗。
l 檢測參數設定畫面
第三章、ATPG 功能介紹
TR7500E 使用手冊
209
n B/W Threshold – 判定黑與白分野的門檻值。
n Bright Ratio –則表示檢測框中白色所佔的比例。
n TEST Method
u Bright – 若檢測框中白色區域超出設定的比例則判定為瑕疵。
u Dark – 若檢測框中白色區域低於設定的比例則判定為瑕疵。
11.2.4. Lead void
l 用來檢查IC 腳的空焊、翹腳。利用灰階值(0-255)來設定門檻值及所佔比例
來判斷是否 NG,為一黑抓白之邏輯運算。與 Void 之檢測原理相同,唯一之
差異是 train 時軟體會先將亮的區域不列入計算,因此就算相同尺寸之檢測
框在計算時每個檢測框之分母仍將會有所差異。
l 檢測參數設定畫面
n B/W Threshold – 判定黑與白分野的門檻值