TR7500E_Manual_ch_v28.pdf - 第221页
第 三 章、 A T PG 功 能 介紹 T R 7500 E 使用手冊 2 13 l 用 來 定位 同一 F OV 內其他 檢測框 因 板 彎 造 成 零 件 之 偏 移 , 一 個 F OV 內 只 可 以 設定 一 個 W a rp 框 , 若分 數 不 足 表 示 此 檢測框 失 去 定位 功能, 但 並 不 代 表 電路板 上的 缺 點 。 假 設板 彎 在 一 個 F OV 之 變 形 量 為 相同 的 前 提 下, 每 顆…
第三章、ATPG 功能介紹
TR7500E 使用手冊
212
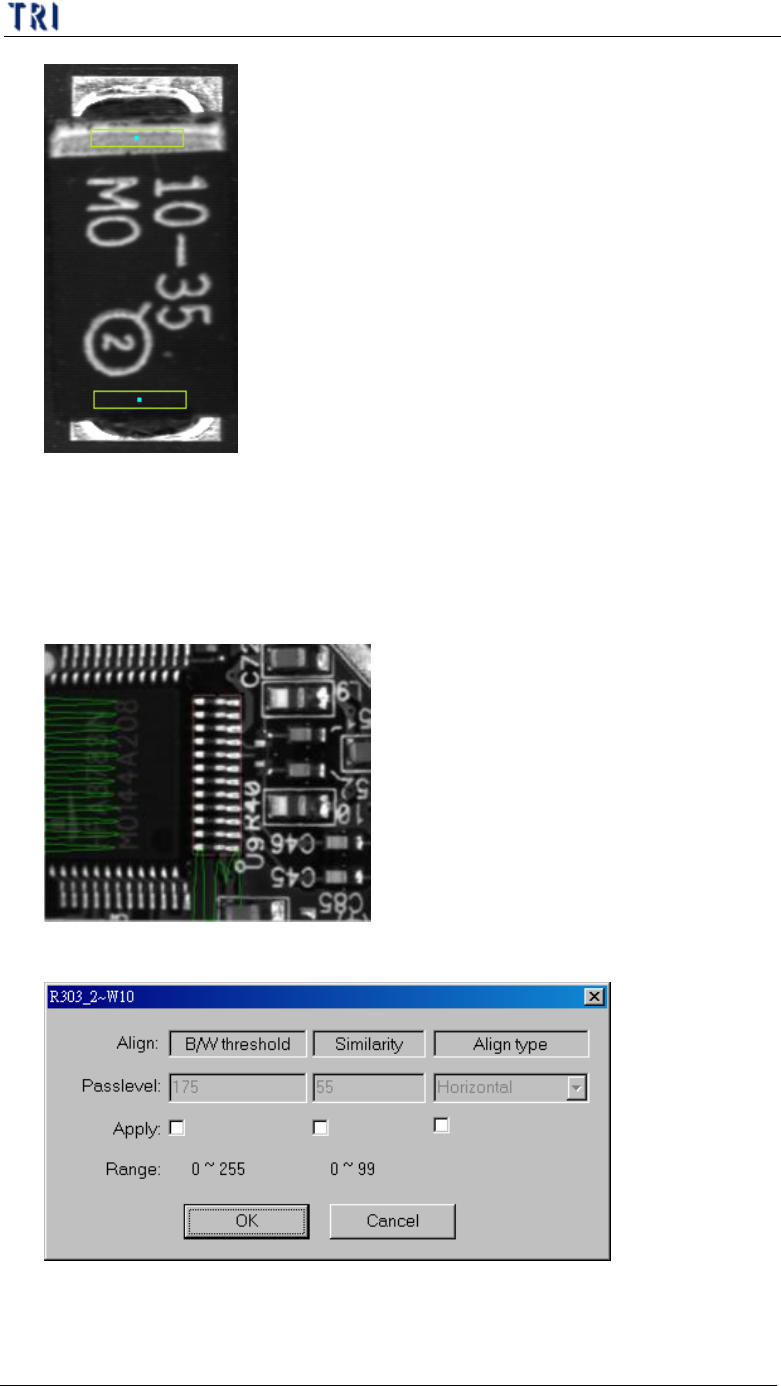
11.2.8. Align
l Align – 用來定位板彎造成零件之偏移,僅若分數不足表示此檢測框失去定
位功能,但並不代表電路板上的缺點。其原理是用 X 及 Y 方向的灰階特徵
值來做定位(方法三),通常應用在 IC 腳或 RN 之上。
l 檢測參數設定畫面
11.2.9. Warp

第三章、ATPG 功能介紹
TR7500E 使用手冊
213
l 用來定位同一 FOV 內其他檢測框因板彎造成零件之偏移,一個 FOV 內只可
以設定一個 Warp 框,若分數不足表示此檢測框失去定位功能,但並不代表
電路板上的缺點。假設板彎在一個 FOV 之變形量為相同的前提下,每顆元
件和 Warp 有一相對關係,當板彎發生時該 FOV 若有設定 Warp,則 Warp
會先定位算出其偏移量,再將其偏移量加回各元件才開始計算此 FOV 中之
零件是否通過檢測。
l 可選擇方法一或方法二作為[Warp]框所使用的影像比對方式。建議從有角度
的攝影機檢測的 FOV 一定要設[Warp]框。
l 在 Train 步驟時才可針對所需要的 FOV 增加[Warp]檢測框。
11.2.10. ROI
l 用來檢測表面刮傷,以及金手指沾錫。在 Train 步驟時才可針對所需要的部
分增加[ROI]檢測框。
l 檢測參數設定畫面
n 教導區 – 設定[ROI]框在學習時的參數
u 敏感度 – 設定 70 分表示若相鄰兩畫素間之灰階值若相差
30(100-70)以上的話,就認定這兩個畫素是已存在的邊界。
u 遮罩區 – 設定為 1 的話表示除了上述視為邊界的相鄰兩畫素外,
與這兩畫素相鄰 1 個畫素的點都設定為不檢測。
第三章、ATPG 功能介紹
TR7500E 使用手冊
214
n 檢測參數區 – 設定[ROI]框在檢測時的參數,檢測時僅針對位在[ROI]
框內但教導後沒有被遮蔽的區域做檢測。
u 檢測敏感度 – 設定 60 分表示若相鄰兩畫素間之灰階值若相差
40(100-60)以上的話,就認定這兩個畫素是新增的邊界或刮痕。
u 容忍度 – 設定為 5 表示若檢測後新增的邊界中有任何一群大於 5
個畫素的話,會被認定為有瑕疵。
n [教導敏感度]設定數值需大於[檢測敏感度],表示教導的敏感度要較敏
感,否則會產生太多誤判。
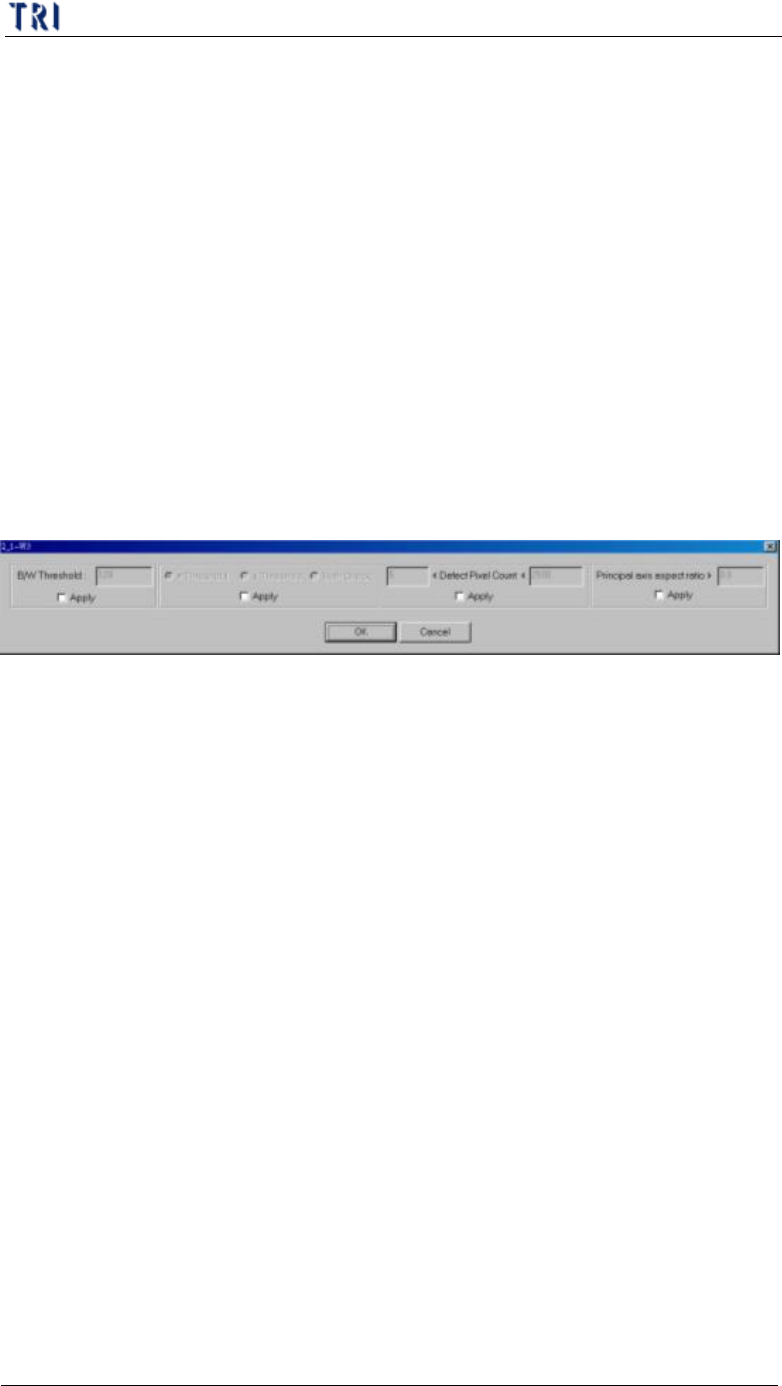
11.2.11. Extra Blob
l 可用來檢測表面刮傷,以及 IC 翹腳。
l 檢測參數設定畫面
n B/W Threshold – 判定黑與白分野的灰階門檻值
n >Threshold – 選擇此項表示只判斷灰階值大於門檻值的影像。
n <Threshold – 選擇此項表示只判斷灰階值小於門檻值的影像。
n Both – 選擇此項表示系統會判斷灰階值大於或小於門檻值的影像。
n Defect Pixel Count –系統會將超出門檻值的畫素(pixel)標示出來,並 將其
中相鄰的畫素視為同一群組。在左右的空格內各填入認為是缺點群組的
最小值及最大值範圍。若 填 入數值為 50< Defect Pixel Count<500 表示若
抓出的缺點群組大小為 50~500 間,則會認為此群組為缺點。
n Principal axis aspect ratio> – 若抓出群組的長寬比大於所輸入的值的話
才視為缺點。本功能可用在抓翹腳時影像出現白邊的長寬比。若輸入 0
表示此項目不檢測。
11.3. CCM 色差比對法及 RGB Weighting 權重設定
11.3.1. 色差比對法 (Color Check Method)
l TR7500 之上方攝影機(Top-View)是採用3個CCD感光感應器(Sensor)之攝影
機,因此在針對各檢測框之影像,配合 RGB 三原色的擷取及權重設定,能
呈現出一般黑白攝影機所無法呈現之色差大的影像。針 對 上方攝影機所做的
各式檢測框,能有較佳的影像對比之品質,造成黑白對比反差較大而易於檢
測出元件缺陷,在此稱為「CCM 色差比對法(Color Check Method)」。
l Chip 類為例,左圖為黑白攝影機之影像,右圖為彩色攝影機經過 RGB