SER04989020_YVL88II Service_J.pdf - 第48页
3- 27 SER04989020 調整 第 3 章 1 1.2.10 移動可能高さ ヘッド部の Z 軸がこの高さ以上になると、X Y 軸の移動が許可されます。 Z 軸が 下がったまま X Y 軸が移動すると、ノズル先端がコンベア部などと接触して破 損する恐れがありますので、指定された値になっていることを確認してくださ い。この「移動可能高さは」は、 「基板面 / 固定トレイ」 (前述の 1.2.6 参 照) か ら標準カメラの場合で …
3-
26
SER04989020
調整
第
3
章
1
5
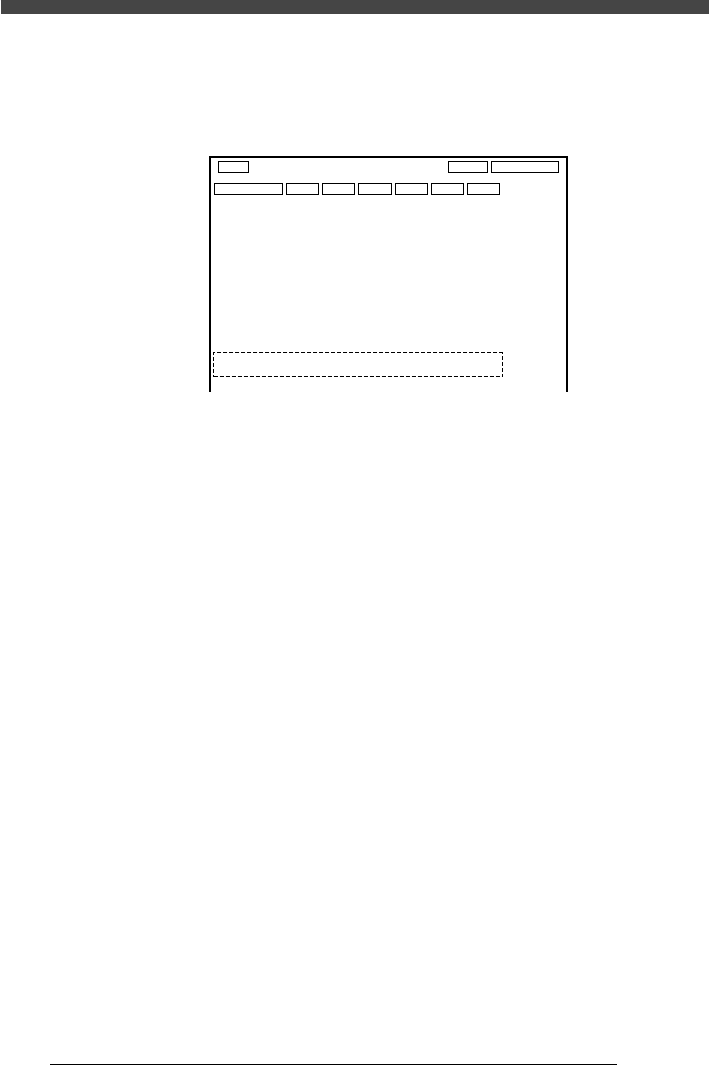
機械座標の画面を開きます。
「3/3/B1 調整項目選択」→「機械座標」を選択実行してください。
6
カーソルを「廃棄ステーション位置」の「X」に合わせます。
60443121-00
対象名
X
機械座標
ビームセンサー
FINE角度
リード浮き検出 1
リード浮き検出 2
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
リファレンスマーカー高さ
同時吸着範囲
チェンジタイマー/ソクド
リトライ回数の上限
廃棄ステーション位置1
廃棄ステーション位置2
移動可能高さ
YZ
編集中
0.00
-5.00
30.00
52.27
0.00
0.50
28.00
0.00
37.27
0.00
0.00
0.00
194.63
194.63
400.00
250.21
0.20
60.00
0.00
210.00
0.00
0.00
0.00
161.26
161.26
400.00
79.85
0.20
200.00
0.00
130.00
R
フィーダー
0.00
0.00
0.00
52.27
1.00
50
1
1
種類
0.02
通常
300
7回
0.00
0.00
編集対象
7
ヘッド1 を廃棄ステーション上に移動させます。
YPU のジョイスティックを操作して、ヘッド1 が廃棄ステーションの部品受
け位置の真上に来るようにします。
d
8
XY 座標のティーチングを実行します。
1. [F10]キーを2回押して、X 座標のティーチングを実行します。
2. 次に、カーソルを「廃棄ステーション位置」の「Y」に合わせます。
3. [F10]キーを2回押して、Y 座標のティーチングを実行します。
0
9
カーソルを「廃棄ステーション位置」の「Z」に合わせ、Z 座
標を入力します。
Z 座標は「基板面高さ」と同じ数値を入力してください。
0
設定データを保存します。
[ESC]キーを押してから、「B2 調整後データ保存」または「B0 データ保存後
終了」を選択実行してください。(保存したくない場合は、「B3 調整前データ
復活」または「B7 強制終了」を選択実行してください。)
3-
27
SER04989020
調整
第
3
章
1
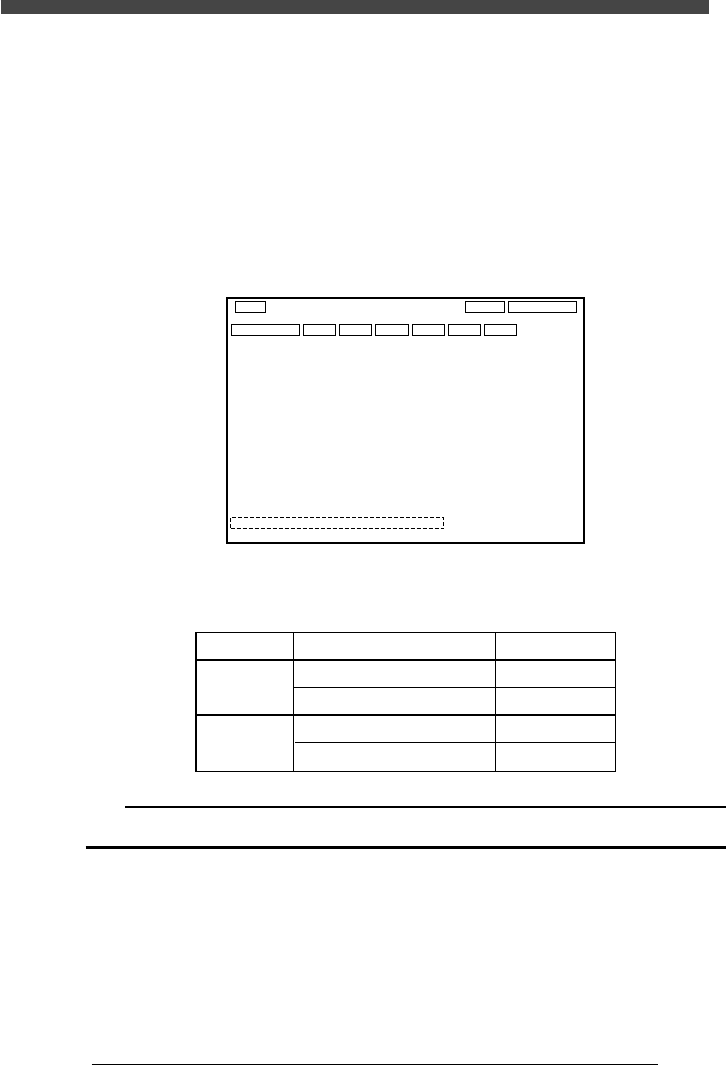
1.2.10移動可能高さ
ヘッド部のZ 軸がこの高さ以上になると、XY 軸の移動が許可されます。Z 軸が
下がったままXY 軸が移動すると、ノズル先端がコンベア部などと接触して破
損する恐れがありますので、指定された値になっていることを確認してくださ
い。この「移動可能高さは」は、「基板面/ 固定トレイ」(前述の 1.2.6 参照)か
ら標準カメラの場合で16.00mm 上昇した位置(「基板面/ 固定トレイ」のZ 値
から16.00 を引いた値)に設定します。特注カメラや特殊マシンの場合は、下
表のように設定してください。
60443122-00
対象名
X
機械座標
ビームセンサー
FINE角度
リード浮き検出 1
リード浮き検出 2
ロケートピン基準
基板外形基準
待機位置
廃棄位置
基板面/固定トレイ
リファレンスマーカー高さ
同時吸着範囲
チェンジタイマー/ソクド
リトライ回数の上限
廃棄ステーション位置1
廃棄ステーション位置2
移動可能高さ
YZ
編集中
0.00
-5.00
30.00
52.27
0.00
0.50
28.00
0.00
36.27
0.00
0.00
0.00
194.63
194.63
400.00
250.21
0.20
60.00
0.00
210.00
0.00
0.00
0.00
161.26
161.26
400.00
79.85
0.20
200.00
0.00
130.00
R
フィーダー
0.00
0.00
0.00
52.27
1.00
50
1
1
種類
0.02
通常
300
7回
0.00
0.00
編集対象
■ 移動可能高さの設定
40443305-00
標準カメラ(□45mm以下)
特注カメラ(□54mm以上)
標準カメラ(□45mm以下)
特注カメラ(□54mm以上)
基板面-16.00
基板面 -9.00
基板面-21.00
基板面-13.00
カメラタイプ
X軸標準
X軸8mm
カサ上げ
移動可能高さZ
c
注意
標準・特注カメラの両方を使用しているマシンでは、低い方に合わせてください。
3-
28
SER04989020
調整
第
3
章
1
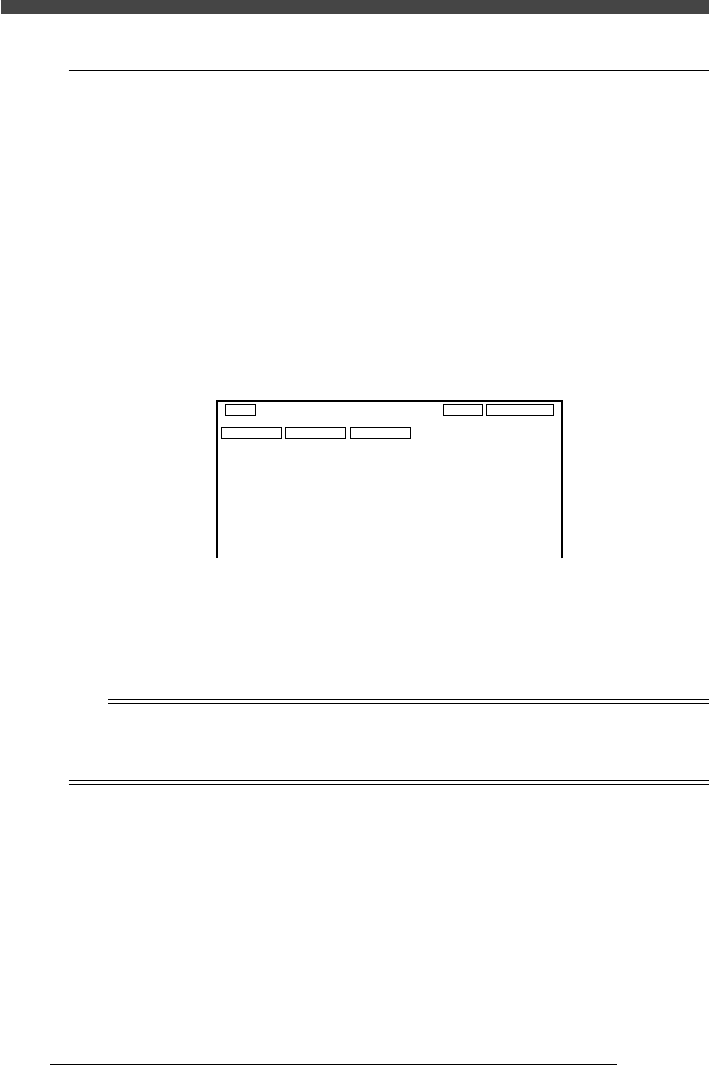
1.3 吸装着レベル
部品は真空発生器からの負圧によってノズルに吸着されます。この負圧は部品搭
載の瞬間に正圧に反転され、部品はノズルから離れて基板に実装されます。
部品を吸装着するときの真空圧は、負圧センサーによって0 から255 レベル
(数値が大きいほど真空度が高い)でデジタル検出されています。
この真空圧の検出レベルに、部品の吸着を判別するための基準真空圧「吸着レベ
ル」と、部品の実装(部品がノズルから離れたこと)を判別するための基準真空
圧「装着レベル」が設定されています。
「3/2/ マシンデータ編集」→「A1 編集ファイル切替」→「吸着レベル」を選択
実行すると、現在の吸装着レベルの設定値を確認できます。
■ 吸装着レベル確認画面
60443105-00
ヘッド番号
吸装着レベル
ヘッド 1
ヘッド 2
編集中
吸着レベル
143
146
装着レベル
208
213
編集対象
吸装着レベルは、次項で説明する「吸装着レベル」調整ユーティリティを実行す
ると最適化されます。この吸装着レベルに、部品データベースや部品情報に登録
した各部品ごとの吸装着真空圧が加味され、自動運転での部品吸装着が判断され
ます。
n
要点
特定のヘッドで部品の廃却が発生するときは、そのヘッドの吸装着レベルを調整する必要がありま
す。一方、特定の部品だけに部品廃却が発生するときは、その部品データを修正する必要がありま
す。