SER04989020_YVL88II Service_J.pdf - 第78页
3 - 57 SER04989020 調整 第 3 章 3 3 . 画像認識装置 Y V L 8 8 Ⅱでは、基板のフィデューシャルマークを認識するための移動カメラ と、部品認識にはモールドサイズを認識するレーザーユニットとリードを認識す るシングル認識カメラを装備しています。また、オプション設定のシングル認識 カメラを追加することによって広い範囲の部品認識が可能になります。 ■ 認識装置の種類 40443301-01 移動カメラ シ…
3-
56
SER04989020
調整
第
3
章
2
2. 基板のマシン間乗り継ぎの確認
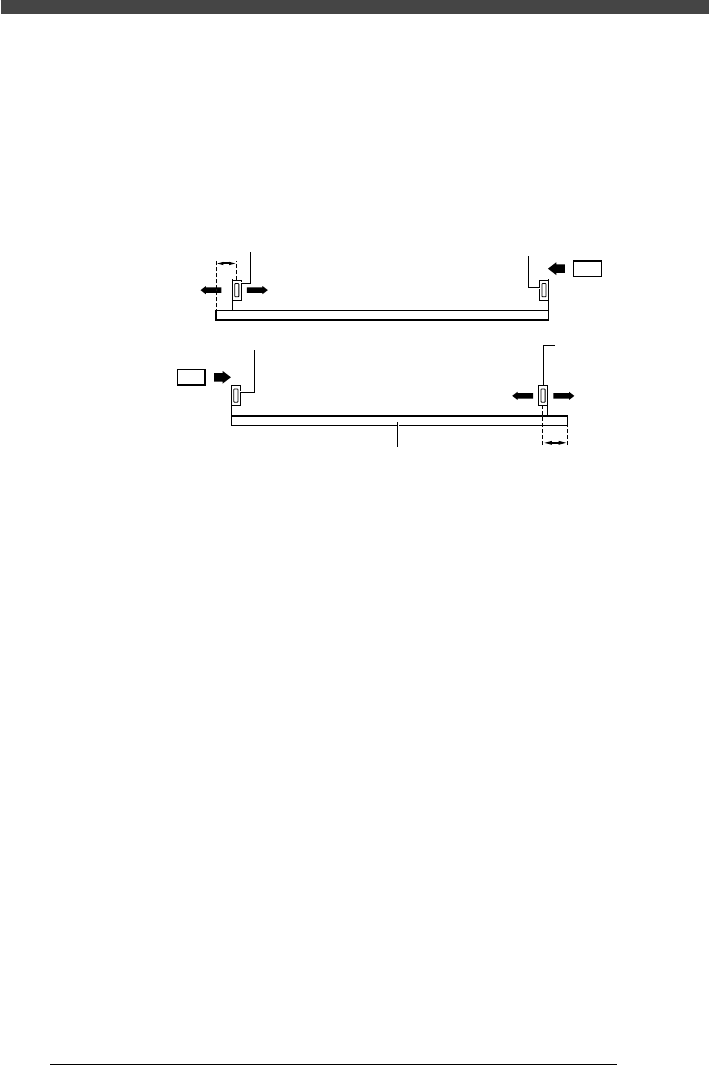
下図に示すように、標準マシンの出口センサーはコンベア端より50mm 内側に
取り付けられています。しかし、次のような基板を使用するときは、出口セン
サーの位置調整などが必要です。その場合、センサー取り付けネジを緩めて、そ
の位置をずらしてください。
■ 入り口センサーと出口センサーの位置
2A043220-00
コンベアレール
PCB
PCB
SQ53
SQ52
SQ53
SQ52
50mm
50mm
BA
AB
長さ50mm 以下の基板
出口センサーを基板長に合わせてコンベア端に寄せてください。(A 方向に移
動させる。)
スリットをもつ基板
スリットで出口センサーがオフするため基板の乗り継ぎが悪い場合は、コンベ
ア空転タイマーを調整してみてください。スリットで出口センサーが誤認識す
る場合は、スリットを誤認識しないように出口センサーの位置を調整してくだ
さい。あるいは特注対応として、出口センサーをダブルセンサーにする方法や
拡散反射型(投光面積が広い)の出口センサーを使用する方法もあります。
重い基板(マザーボードなど)
コンベアスピードを遅くするか、出口センサーを上図のB 方向に移動させて基
板がコンベア端に達するまでに停止するように調整してください。
3 -
57
SER04989020
調整
第
3
章
3
3. 画像認識装置
YVL88 Ⅱでは、基板のフィデューシャルマークを認識するための移動カメラ
と、部品認識にはモールドサイズを認識するレーザーユニットとリードを認識す
るシングル認識カメラを装備しています。また、オプション設定のシングル認識
カメラを追加することによって広い範囲の部品認識が可能になります。
■ 認識装置の種類
40443301-01
移動カメラ
シングル認識カメラ
レーザーユニット
基板マーク認識やティーチング
主にリード部品の認識 (QFP, BGA部品など)
主に小型モールド部品の認識 (チップ部品など)
ここでは、それぞれの認識装置に関する調整方法を説明します。いずれの調整項
目も 、「3/3 マシン調整」モードの調整ユーティリティを使います。
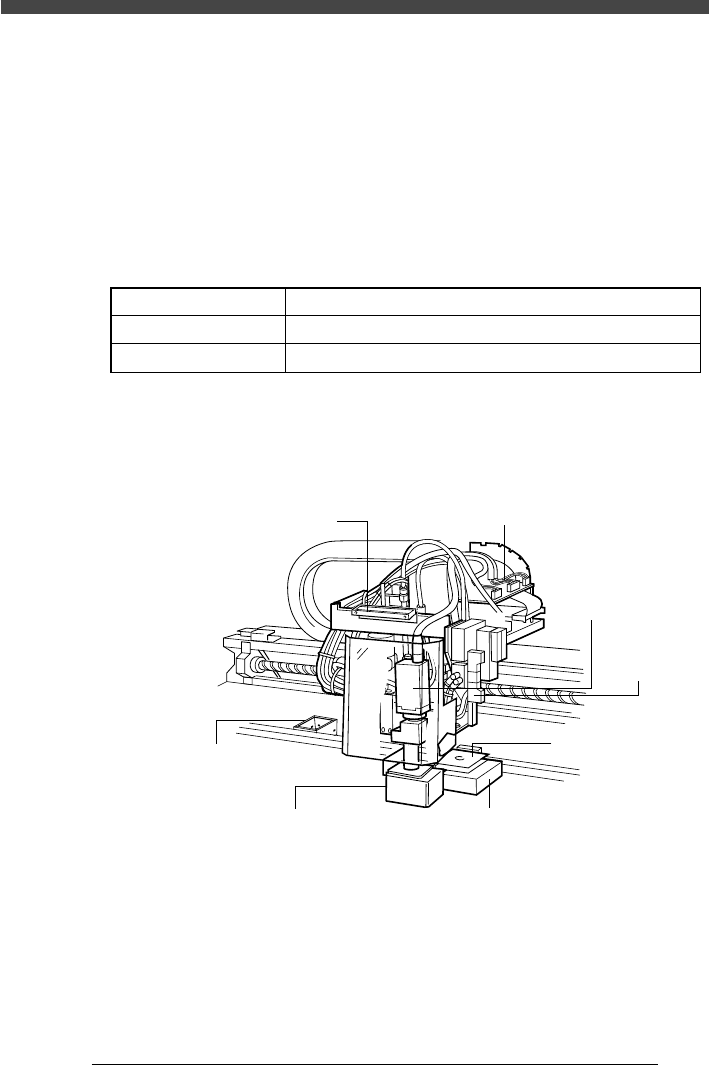
■ 画像認識装置
20443300-00
ヘッド部移動用ハンドル
ヘッド部 I/Oボード
移動カメラ
バックライト
移動用エアバルブ
バックライト(透過照明)
レーザーユニット
移動カメラ用LED照明
シングル認識カメラ/反射照明
3-
58
SER04989020
調整
第
3
章
3
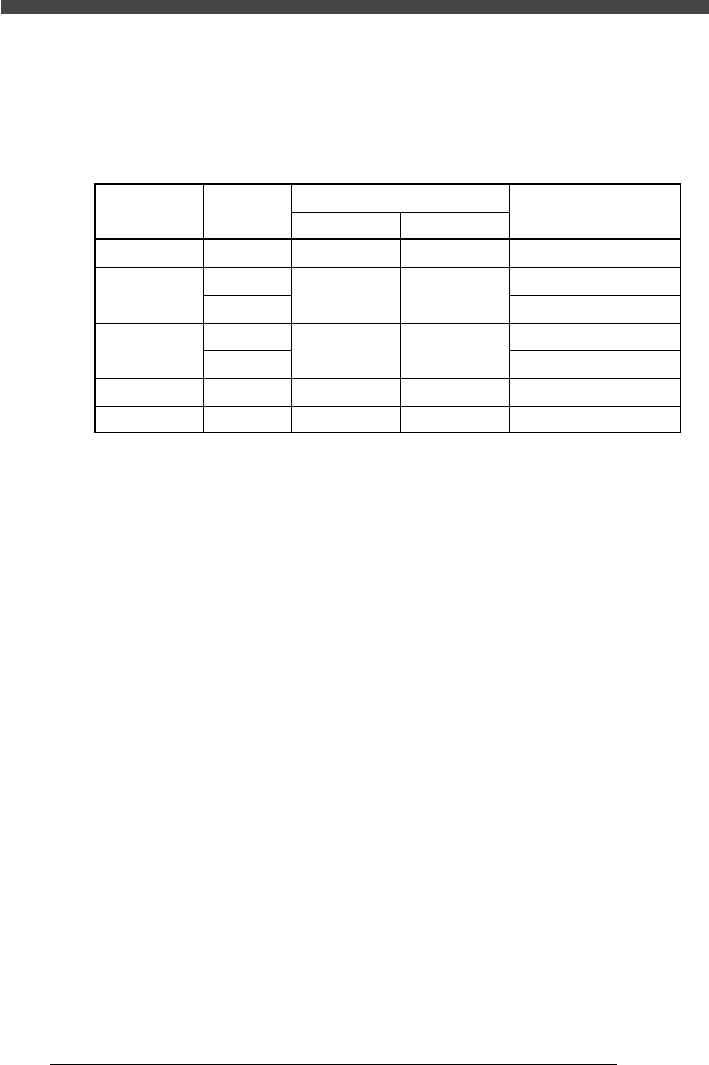
シングル認識カメラの視野は、マシンに設置したカメラの仕様によって異なりま
す。下表にカメラの視野と認識可能部品サイズとリードピッチの関係を示しま
す。
■ シングル認識カメラの仕様
40443302-00
種類 認識方法
適応部品
サイズ ピッチ
□15mm対応 反射 □2∼□15mm 0.5mm
BGA・CSP(ボール径0.2mm以上)
□32mm対応
透過
□5∼□32mm 0.3mm
QFP
反射 QFP・BGA・PLCC
□45mm対応
透過
□5∼□45mm 0.5mm
QFP
反射 QFP・BGA・PLCC
□54mm対応 反射 □5∼□54mm 0.5mm 大型QFP・小型コネクタ
100×50対応 反射 50∼100mm 0.65mm 大型コネクタ
対応部品