D3操作手册.pdf - 第33页
33 Vision Sensor Technology PCB Position Recognition Description Diff er ent fi du cial s hap es prove to be optimal depe nd- ing on the co ndition of the surface. Particularly advisable for bare copper surfaces with lit…
32
Vision Sensor Technology
PCB Position Recognition
Technical data
PCB fiducials
Local fiducials
Library memory f. recog-
nition of bad panels
up to 3 (subpanels and multiple panels)
up to 6 for the Long board option
(Optional PCB fiducials are output by
the optimization.)
up to 2 per PCB (may be of different
type)
up to 255 fiducial types per subpanel
Image analysis Edge detection method (Singular fea-
ture) based on grayscale values
Lighting method Front lighting
Fiducial recognition time 0.1 s
Field of vision 5.78 x 5.78 mm²
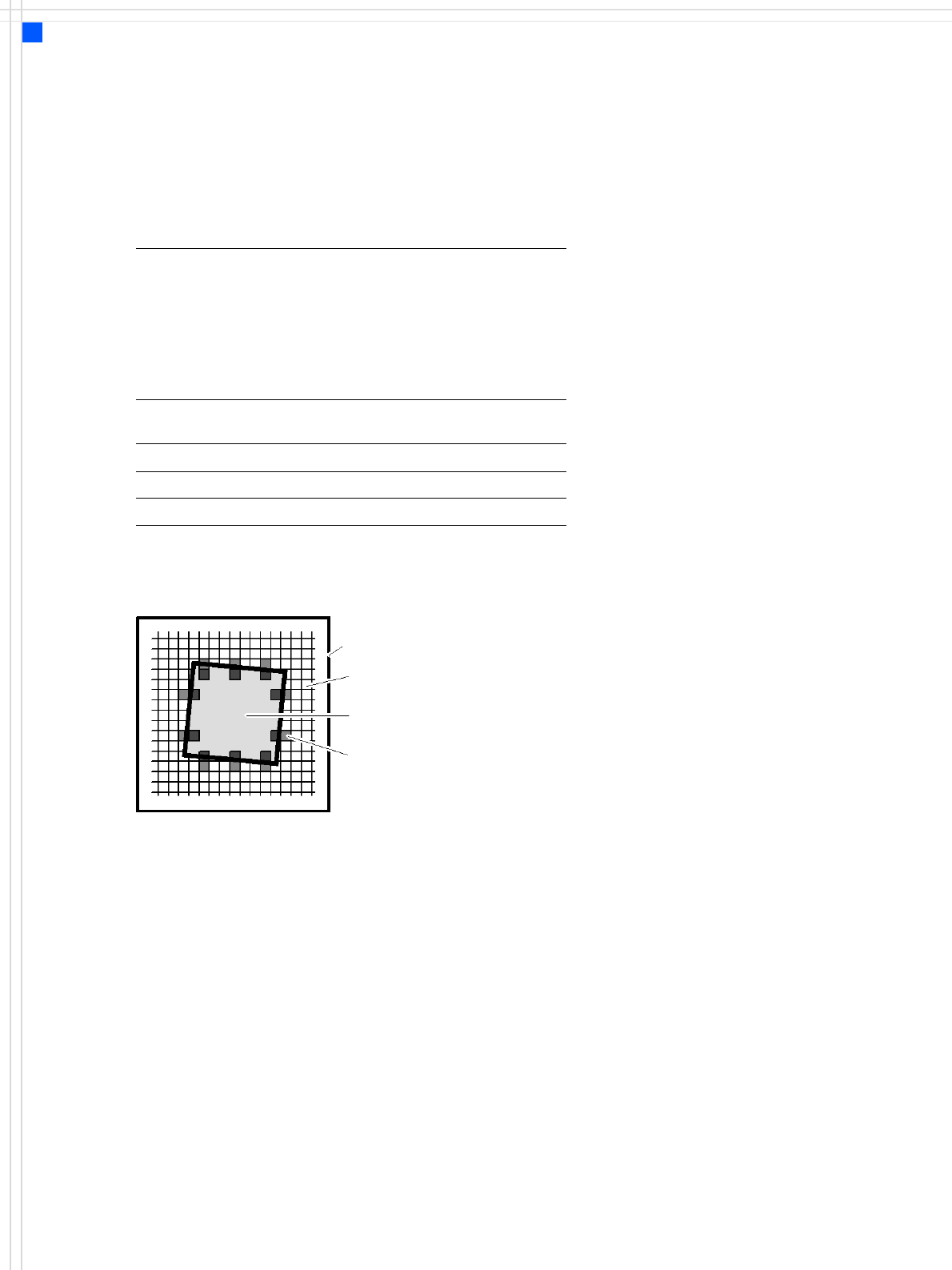
Camera’s field of view
Pixel
Ink spot, e.g. square
Evaluation window
Edge detection method
The size of the fiducial is pro-
grammed at the station com-
puter. From this time on form
and size of the fiducial is de-
fined and known. With these
data the PCB vision module is
able to search and recognize
the fiducial at the predefined
position on the PCB or ceram-
ic substrate without further
assistance. For this reason it
places several small evalua-
tion windows at the assumed
border of the fiducial. Within
these evaluation windows
the vision system looks for
contrast transitions between
bright and dark. After finding
such contrasts the actual
position of the fiducial can be
assigned by comparison with
the predefined – and thus
known – shape and size.
The analysis operations can
be used to determine any off-
set with respect to the DE-
SIRED position in the X and Y
directions and the angular
position.
Alternatively, a fiducial may
be taught as a pattern.
Additional functions of the
PCB vision module are recog-
nition of the position of the
feeder modules and ceramic
substrate (optional) and
recording of the machine
data including mapping.
The bad board detector
(GOOD/SCRAP scan) is also
moved over the ink spot
using the PCB vision module.
Description
SIPLACE has a number of
vision modules and a central
vision system to evaluate the
recorded image data ensur-
ing high placement accuracy.
At the machine's X-gantry
the PCB vision module is
mounted. It is used to find
the PCB's positioning-offsets
within the conveyor system.
This vision module is also
required to measure the
machine origin and/or the
feeder module positions on
one side of the table. Each
vision module consists of a
single CCD camera with inte-
grated lighting and optics.
The offsets in the position of
the PCBs are determined with
the help of at least two but
generally three reference
fiducials on the PCB. When
the PCB arrives at the place-
ment area the positioning
system with its PCB vision
module moves to the pro-
grammed fiducial.
The edge detection method
allows to choose predefined
fiducials from a menu (e.g.
cross, circle, square).
33
Vision Sensor Technology
PCB Position Recognition
Description
Different fiducial shapes
prove to be optimal depend-
ing on the condition of the
surface.
Particularly advisable for bare
copper surfaces with little
oxidation is the single cross.
Maximum accuracy is
achieved due to the high in-
formation content. Rectan-
gle, square and circle are less
“informative” but save space
and can even be used when
oxidation is at an advanced
stage.
Advisable for tinned struc-
tures are circle or square be-
cause in this case the ratio of
the fiducial dimensions to
the presolder thickness is
particularly favorable.
Fiducial criteria
Locate 2 fiducials
Locate 3 fiducials
X-/Y-position, rotation angle, mean PCB distortion
in addition: shear, distortion in X- and Y-direction separately
Fiducial shapes Synthetic fiducials: circle, cross, square, rectangle, rhombus, circu-
lar, square, and rectangular contours, double cross, any pattern
Fiducial surface:
copper
tin
without oxidation and solder resist
Warp ≤ 1/10 of structure width, both with good contrast to envi-
ronment
Dimensions of synthetic fiducials
min. X/Y size for circle and rectangle: 0.25 mm
min. X/Y size for annulus and rectangle: 0.3 mm
min. X/Y size for cross: 0.3 mm
min. X/Y size for double-cross: 0.5 mm
min. X/Y size for lozenge: 0.35 mm
min. frame width for annulus and rectangle: 0.1 mm
min. bar width / bar distance for cross, double-cross: 0.1 mm
max. X/Y size for fiducial shapes: 3 mm
max. bar width for cross / double-cross: 1.5 mm
min. tolerances, general: 2% of nominal dimension
max. tolerances, general: 20% of nominal dimension
Dimensions of patterns
min. size
max. size
0.5 mm
3 mm
Fiducial environment Clearance around reference fiducial not necessary if there is no
similar fiducial structure in the search area
34
Vision Sensor Technology
Bad Board Recognition
Position Recognition for Feeder Modules
Ink Spot Criteria
Methods • Synthetic fiducial recognition
method
• Mean grayscale value
• Histogram method
• Template matching
Shapes and sizes of fiducials/
structures for
synthetic fiducials
other methods
For dimensions of synthetic fidu-
cials, see page 33
min. 0.3 mm
max. 5 mm
Masking material good coverage
Recognition time depends on the method:
20 ms - 0.2s
Description
In the cluster technology
each subpanel is assigned an
ink spot. If this is present dur-
ing the measurement via the
PCB vision module, the corre-
sponding subpanel is popu-
lated.
It is also possible to accom-
plish the population of the
subpanel when the ink spot is
missing. With this function it
is possible to eliminate costs
due to unnecessary popula-
tion of faulty subpanels.
Global Ink Spot
Each GOOD/SCRAP scan takes
some time, and the time re-
quired is even greater if there
are a large number of sub-
panels on a PCB. Using the
global ink spot can result in a
significant reduction of these
secondary times.
The PCB vision module
searches at positions taught
before for the defined fidu-
cial. In case of recognition
there is no following evalua-
tion of subpanels. The sys-
tem allows the operator to
choose also the reverse inter-
pretation.
Recognition of the position
of the feeder modules
The pick-up position of the
components can be deter-
mined precisely with the aid
of the position recognition
for the feeder. The offset in
position relative to the stored
ideal position is determined
on the basis of fiducials on
the feeder modules using the
PCB vision module. This pro-
vides very high pick-up reli-
ability even for the very first
component, which is particu-
larly important for small com-
ponents.