D3操作手册.pdf - 第4页
4 Electrica l Connec tion, Inte rfaces and Compresse d Air Conne ction 41 Dimensions an d Set-up Conditions 42 Placement System ’s Center of Gravity 43 Maneuvering R adii 44 MTC Dimensions an d Set-Up Conditi ons 44 Spac…
3
SIPLACE D3
Contents
SIPLACE D3 3
Contents 3
Machine Description 5
Overview 5
Extensions 6
Technical Data 7
Placement Heads 9
Head Modularity 9
12-Nozzle Collect & Place Head for High-Speed Placement 10
6-Nozzle Collect&Place Head for High-Speed IC Placement 11
Collect&Place Heads 12
Technical Data for the C&P Heads 12
TwinHead for High-Precision IC Placement 13
Technical Data for the TwinHead 14
Nozzle Changers (Collect&Place Heads) 15
Nozzle Changer (TwinHead) 16
Technical Data for the Nozzle Changers 17
PCB Conveyor 18
Single Conveyor 18
Technical Data for the Single Conveyor 19
Flexible Dual Conveyor 20
Technical Data for the Dual Conveyor 21
SIPLACE PCB Barcode for Product-Controlled Production (Option) 22
Component Feeding 23
Component Changeover Table 23
Technical Data 24
S Tape Feeder Modules 25
Bulk Case and Vibratory Stick Feeder Modules for the CO Changeover Table 26
Dummy Feeder Modules 27
Waffle-Pack Tray Holder 28
Matrix Tray Changer 29
Technical Data 30
Vision Sensor Technology 32
PCB Position Recognition 32
Bad Board Recognition 34
Position Recognition for Feeder Modules 34
Sample Configuration 35
Technical Data 36
Siemens Signal Interface 36
Connector Assignment 36
Signal Curve 37
SMEMA Interface 38
Connector Assignment 38
Signal Curve 39
Electrical Ratings and Compressed Air Supply 40
4
Electrical Connection, Interfaces and Compressed Air Connection 41
Dimensions and Set-up Conditions 42
Placement System’s Center of Gravity 43
Maneuvering Radii 44
MTC Dimensions and Set-Up Conditions 44
Spacing Distances for Single Conveyor 45
Spacing Distances for Dual Conveyor 46
Spacing Distances for Placement Machine and MTC 47
Transport and Delivery Configuration 48
Option List 49
SIPLACE D3
Contents
5
Machine Description
Overview
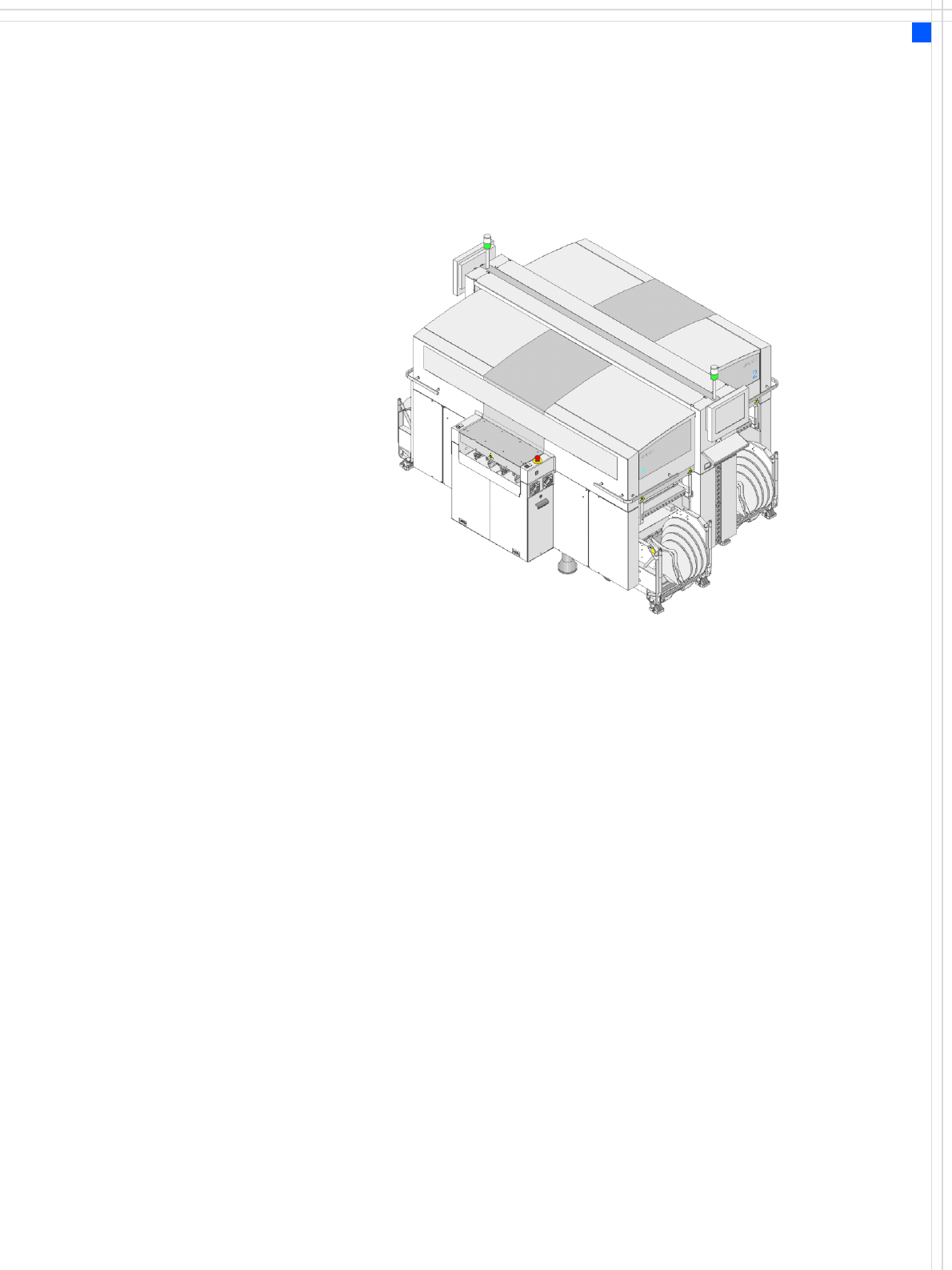
Description
The SIPLACE D3 placement
system is particularly suit-
able for applications that
demand a high level of flexi-
bility, utmost precision, and
a high placement rate. Two
placement methods are
used:
•the Collect&Place
method for high-speed
placement of standard
components (see diagram
on page 6)
•the Pick&Place method
for fast placement of spe-
cial fine-pitch and super-
fine pitch components
The D3 placement system
has three gantries driven by
linear motors. The gantries
can be quickly and accurately
positioned in the X and Y
directions. There is a place-
ment head on each gantry.
The following placement
head configurations are pos-
sible:
Placement area 1
• two 12-nozzle Collect &
Place heads or
• two 6-nozzle Collect &
Place heads or
• one 6-nozzle and one 12-
nozzle Collect&Place head
Placement area 2
•TwinHead
The head modularity prin-
ciple allows the placement
heads to be reconfigured to
suit changing requirements.
The table "Technical Data" on
page 7 contains a list of the
possible placement head
configurations and the
resulting placement rate.
The moving head picks up
the components from their
stationary feeder, and places
them on the PCB, which is
also stationary. This proven
SIPLACE principle has many
advantages:
• Short down times for refill-
ing or splicing
• Even the smallest compo-
nents are picked up reli-
ably
• The components cannot
slip on the PCB
• Minimal traversing paths
High flexibility, cost-effec-
tiveness and set-up reliability
guarantee that the SIPLACE
D3 placement system will be
highly productive. The mini-
mal down times increase
utilization, thus further in-
creasing productivity.