RX-7R-安装要领书.pdf - 第31页
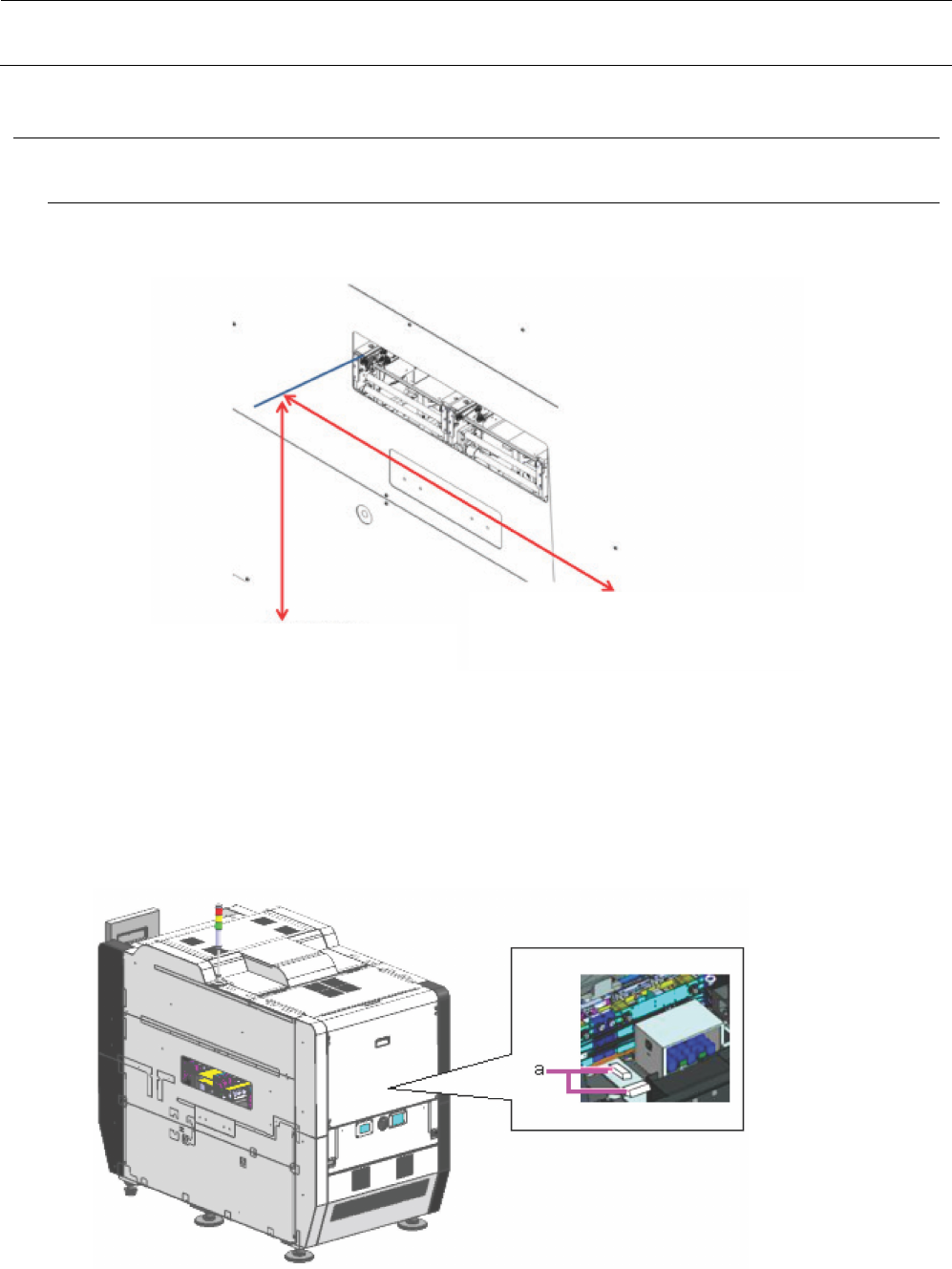
安装要领书 28 5. 基板传送高 度和水平调 整 5- 1. 水平调整 1. 使用六角扳手卸 下本机后部的护 罩 ,在 设置 水平器用的 空间之 X 方向和 Y 方向各放 1 个水平 器。 (是 RX -7 时) 基板传送高度度 900 - 20/+ 45mm 950 - 20/+ 45mm (950mm 规格 ) 基板传送面:本 机正面侧的输送 带上面
安装要领书
27
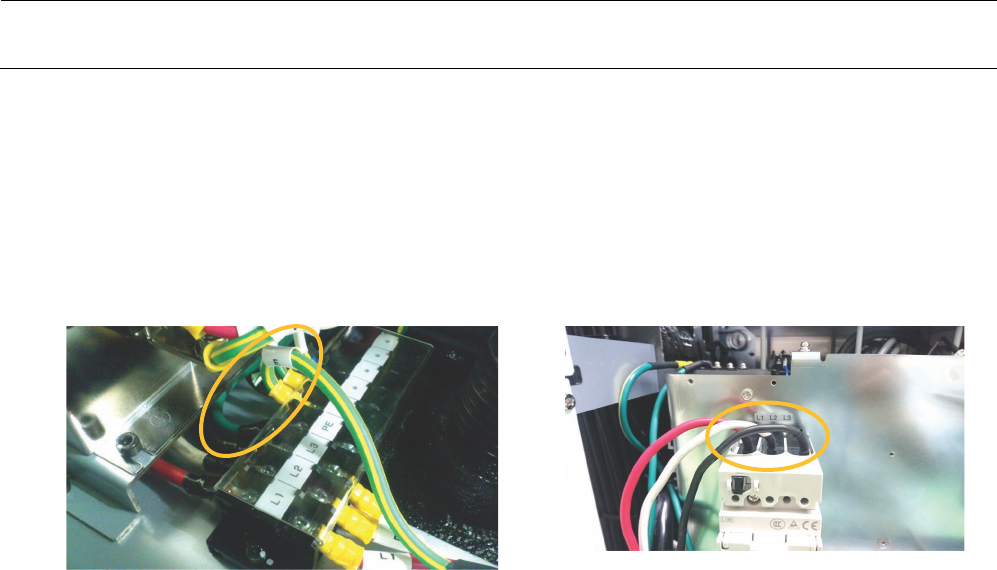
<真空泵旋转方向相反时进行的作业>
如旋转方向相反,是因为向装置供电的厂方的 3 相电源之相位順序并不是 UVW。
要做的就是把装置断流器所连接的来自厂方的供电电缆 L2 与 L3 进行调换。
操作前,请一定要万用表等对配电盘的断流器 OFF 等进行确认,保证要进行调换的电源回路的电源已
被切断。
连接的要领请参阅设置要领书的第 11 章。
RX-7 时 RX-7R 时
安装要领书
28
5.
基板传送高度和水平调整
5-1.
水平调整
1.
使用六角扳手卸下本机后部的护罩,在设置水平器用的空间之
X
方向和
Y
方向各放
1
个水平器。
(是
RX-7
时)
基板传送高度度
900 -20/+45mm
950 -20/+45mm (950mm 规格)
基板传送面:本机正面侧的输送带上面
安装要领书
29
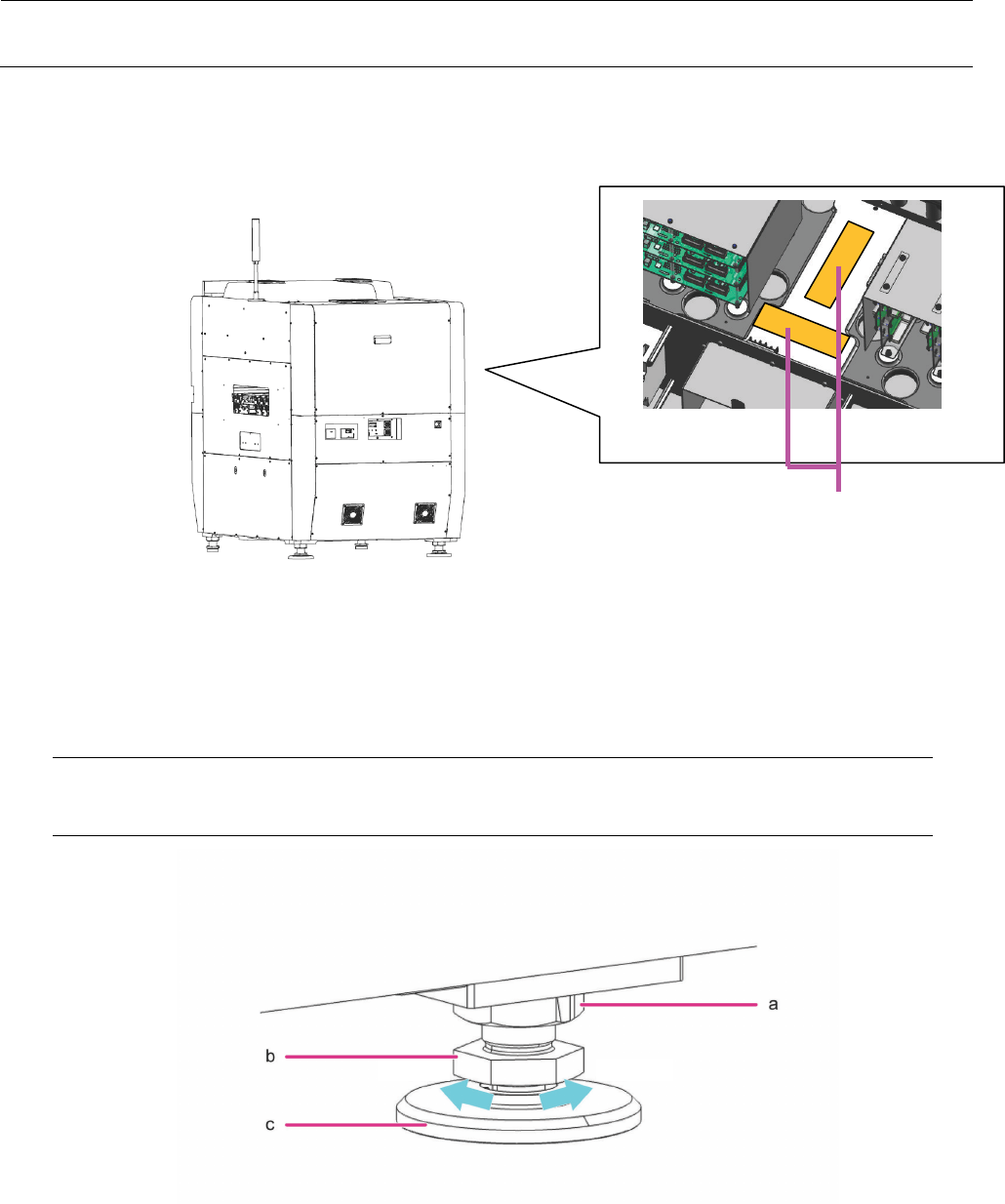
使用螺丝刀卸下本机后部的护罩,在 设置水平器用的空间之
X
方向和
Y
方向各放
1
个水平器。( 是
RX-7R
时)
(a)
水平器
2.
为了对准本机前工序和后工序的基板搬送高度,要用扳手旋转底部脚(
RX-7: 6
个,
RX-7R: 4
个)
的六角螺母来调整基板搬送高度。
向右旋转为上升,向左旋转为下降。
注意
脚高度调整用六角螺母的
2
面宽度为
64mm
。
(a)
锁定用螺母
(b)
脚的六角螺母
(c)
脚
a
上升
下降