3. SM411F_Administrators_Guide(Kor_Ver5).pdf - 第327页
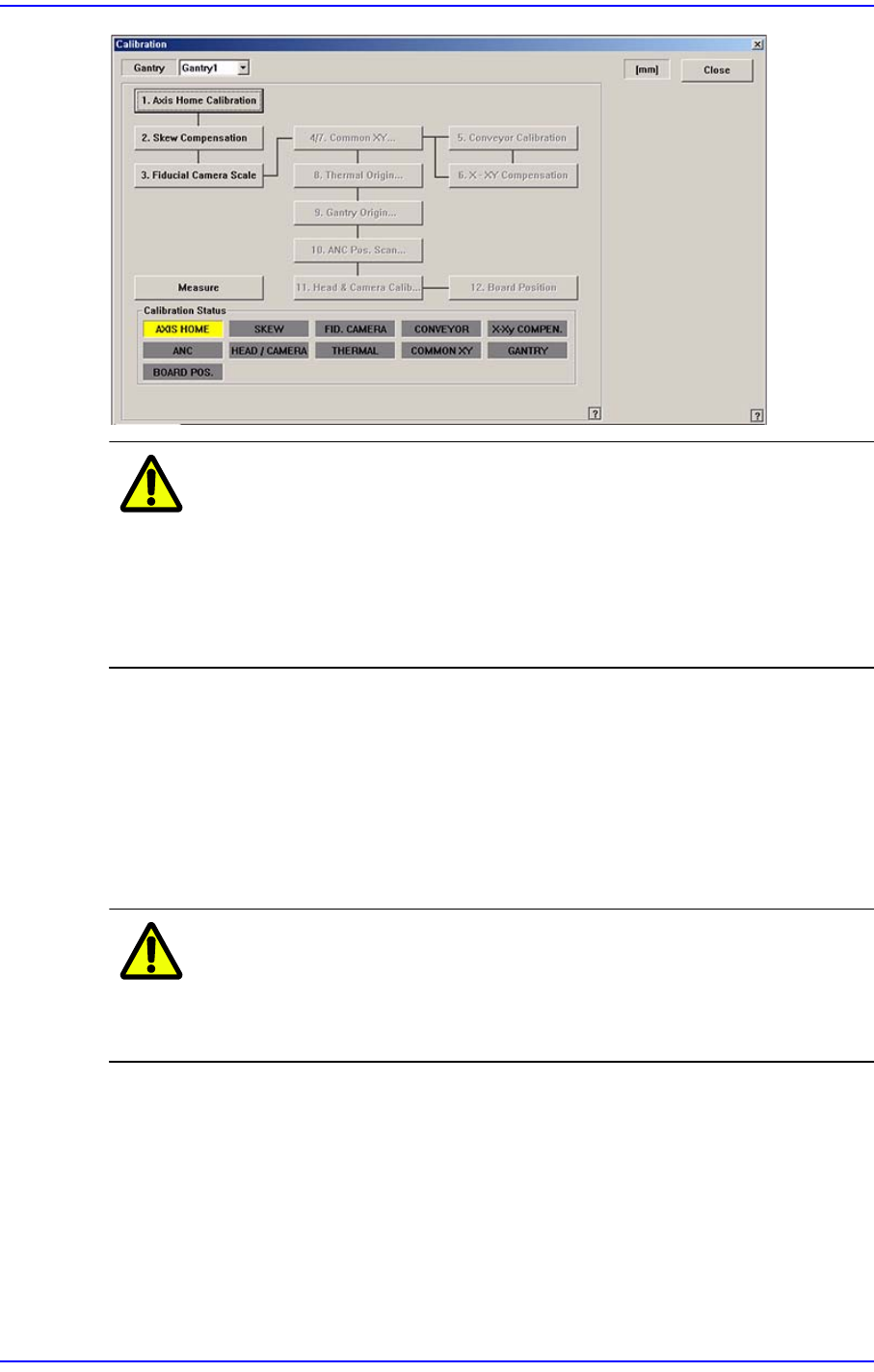
12-15 Machine Calibration 주 의 다시 Calibration 을 하면 Home 위치가 변경되어 Pickup 위치 , ANC, 장착원점 등 장비의 위치관련 항목들을 재 Teaching 하지 않으면 장비가 제대로 동작되지 않습니다 . 다시 Calibration 을 하고 나면 반드시 위치관련 항목들을 재 Teaching 하십시오 . 12.3.2. Skew compensation…
12-14
Samsung Component Placer SM411F/411FN Administrator
’
s Guide
<Skew Compensation> 버튼
Y축을 선택할 경우, 활성화 됩니다. Skew Compensation을 수행하기 위해서 사
용됩니다. 자세한 사항은
“
12.3.2 Skew compensation
”
을 참조하십시오.
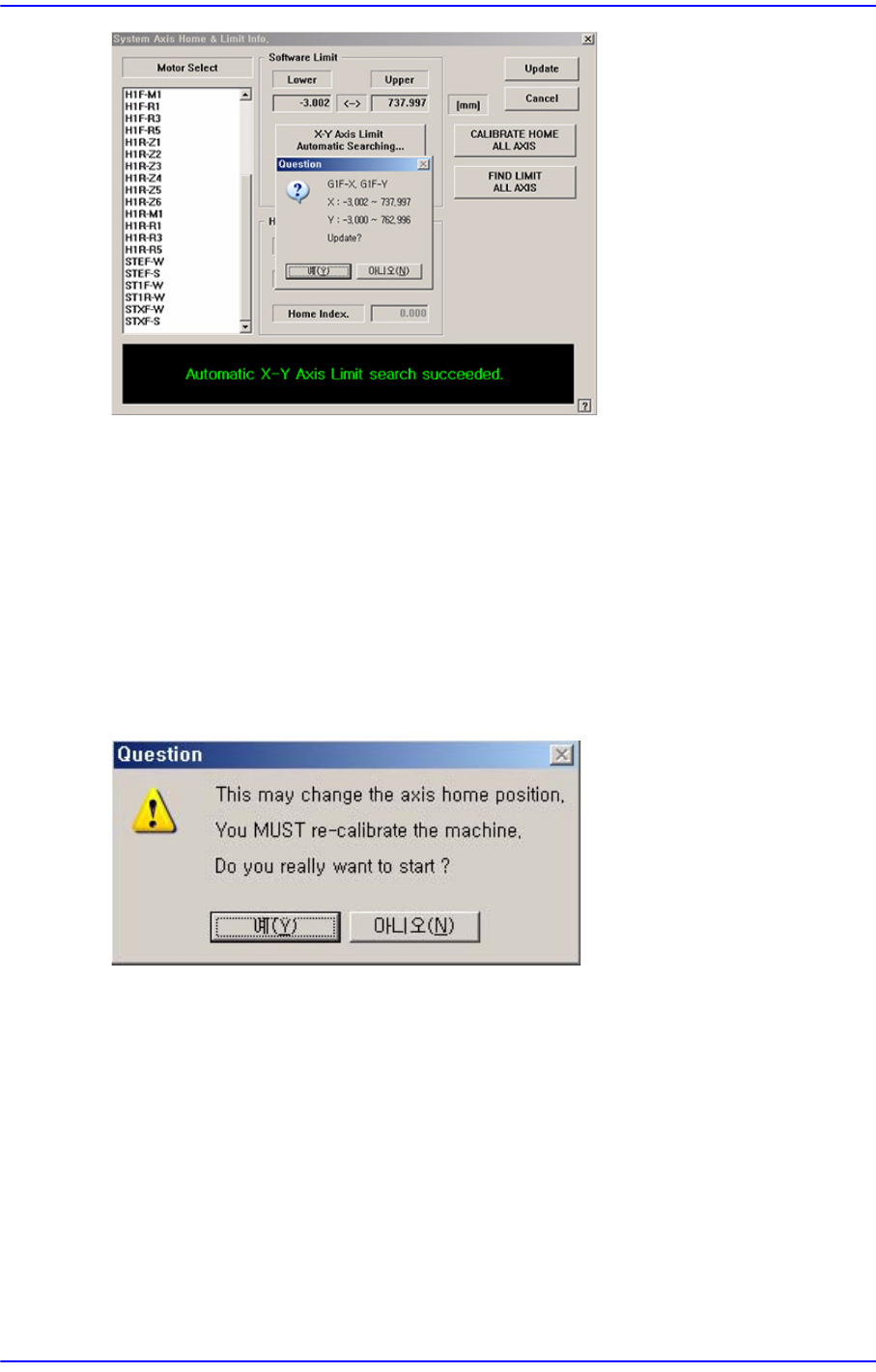
<Calibrate Home> 버튼
<Motor Select> 리스트박스에서 선택된 모터의 홈 위치를 자동으로 찾아서 반영
합니다.
<CALIBRATE HOME ALL AXIS> 버튼
모든 축들의 홈 위치를 자동으로 찾아서 반영합니다.
<FIND LIMIT ALL AXIS> 버튼
모든 축에 대한 Limit값을 찾습니다.
<Home Info.> 영역
Mirror 축을 선택하면 <Home Offset> 에디트박스가 활성화됩니다. Mirror 축에
대한 캘리브레이션을 할 경우, 사용됩니다.
<Update> 버튼
변경된 값을 적용합니다.
<Close> 버튼
대화상자를 종료합니다.
12-15
Machine Calibration
주 의 다시 Calibration을 하면 Home위치가 변경되어 Pickup 위치,
ANC, 장착원점 등 장비의 위치관련 항목들을 재 Teaching하지
않으면 장비가 제대로 동작되지 않습니다.
다시 Calibration을 하고 나면 반드시 위치관련 항목들을 재
Teaching하십시오.
12.3.2. Skew compensation
Skew는 장비의 이동 후에 Y1과 Y2축에 대해 X축 프레임이 수직을 이루지 못하고
틀어짐이 발생한 것을 보상하는 것을 의미합니다. 이는 장비의 최초 설치 및 이동 후
에 반드시 수행되어져야 합니다. Y축에 대한 Skew Compensation을 수행하는 방법
은 다음과 같습니다;
주 의 최초 장비의 설치 및 이동 후에, 원점복귀를 수행하기 전에 반드
시 <Skew Compensation>을 수행해야 합니다. 그렇지 않으면
장비가 구동 중 손상을 입을 수 있습니다.
12-16
Samsung Component Placer SM411F/411FN Administrator
’
s Guide
먼저, X프레임을 수동으로 장비의 중간부분으로 이동시키십시오.
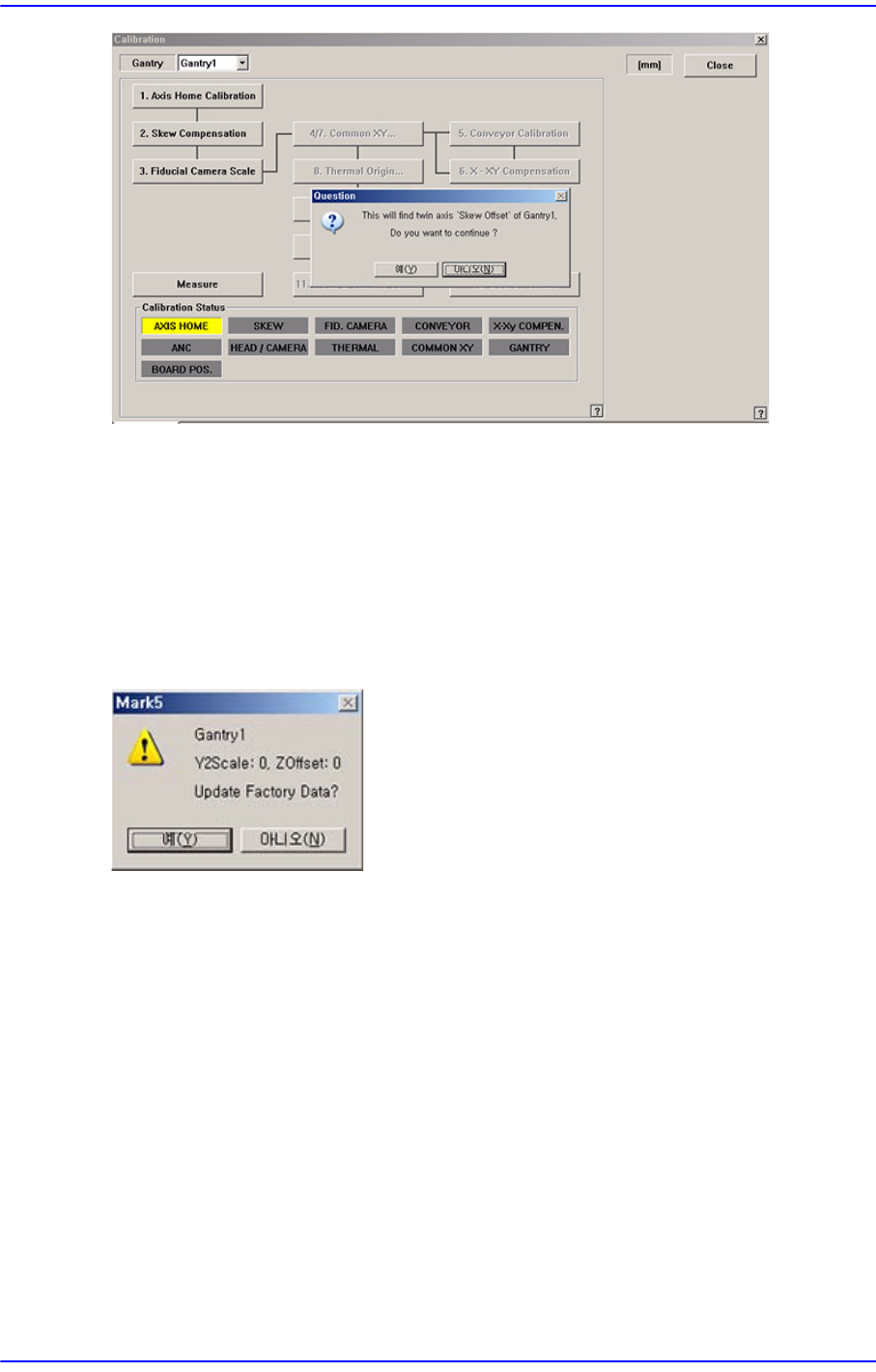
<Skew compensation> 버튼을 클릭하십시오. 그러면 자동으로 Z축에 대한 원점
복귀를 수행하고, Y1축 모터가 회전하면서 Y Home 센서를 감지하기까지 X 프
레임을 이동시키고 Home 센서 감지 후, 반대 방향으로 Y축 이동거리(Y Stroke)
만큼 이동시킨 후, 다시 반대 방향으로 Y축 Home센서를 감지하기까지 이동합
니다.
그리고 다음과 같이 Skew 정보를 보여주고 이 값을 적용할지 묻습니다.
<예 (Y
)>버튼을 클릭하면 적용된 Skew 정보에 따라 새로이 장비가 원점복귀를
수행합니다.