DEK高级培训资料.pdf - 第88页
Nodes Rising T ab le mot or (Dunker) Node 6 Main Machine Node 2 Screen Cleaner Node 4 Camera ‘Y’ (on motor) Node 9 Camera ‘X’ (on motor) Node 8 NextMove ES Card Node 1 - CAN Master Rising T ab le mot or Issue 2: July 200…
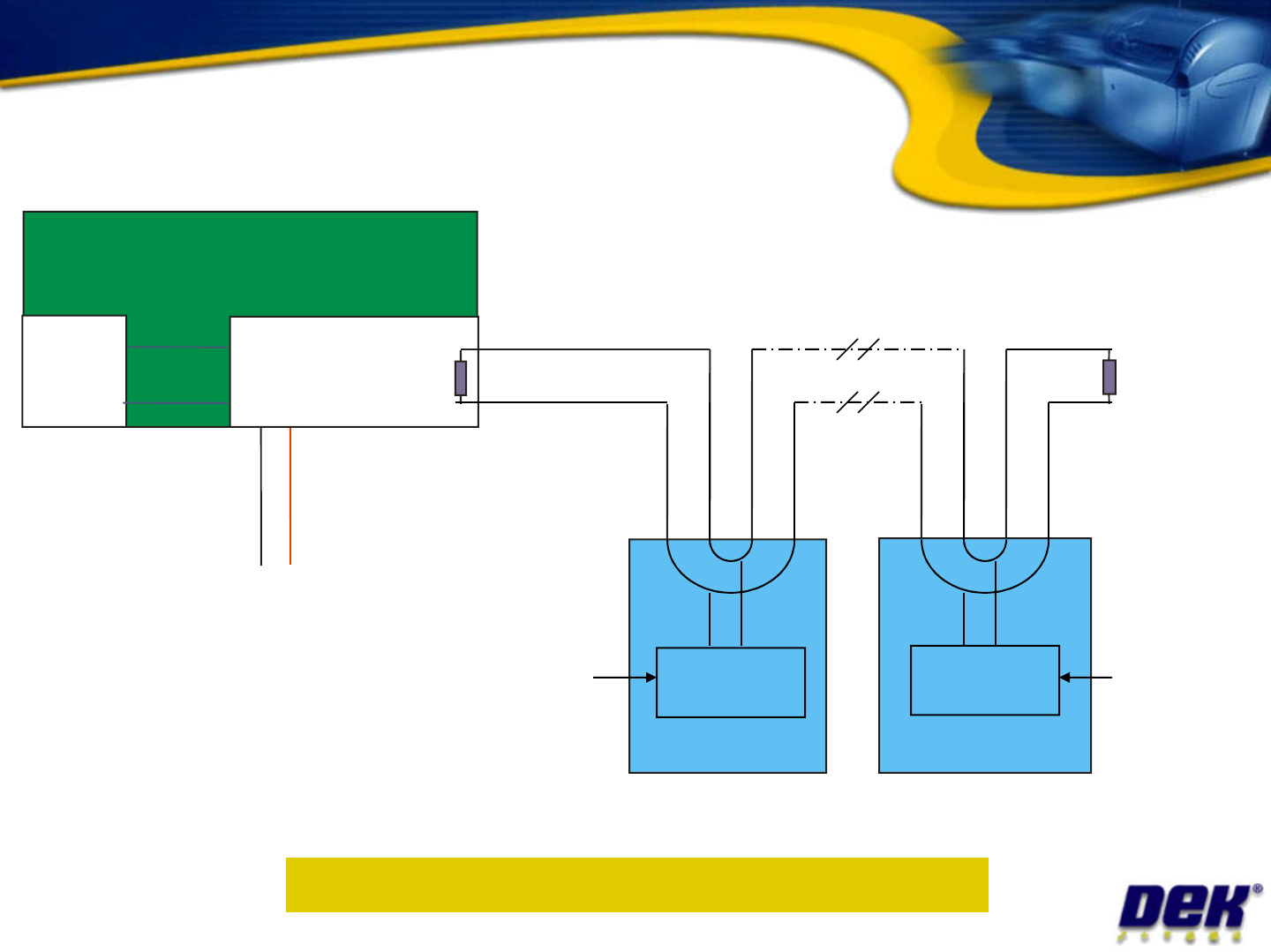
DEK CAN architecture
CAN
Nextmove ES
Tx
Rx
Transceiver
CAN High
CAN Low
120Ω 120Ω
Issue 2: July 2007
0V
+24V
Node
Electronics
For the node to read the bus level correctly it is important that signal reflections
are avoided. This is done by terminating the line with a resistor at both ends of
the bus.
Node
Electronics
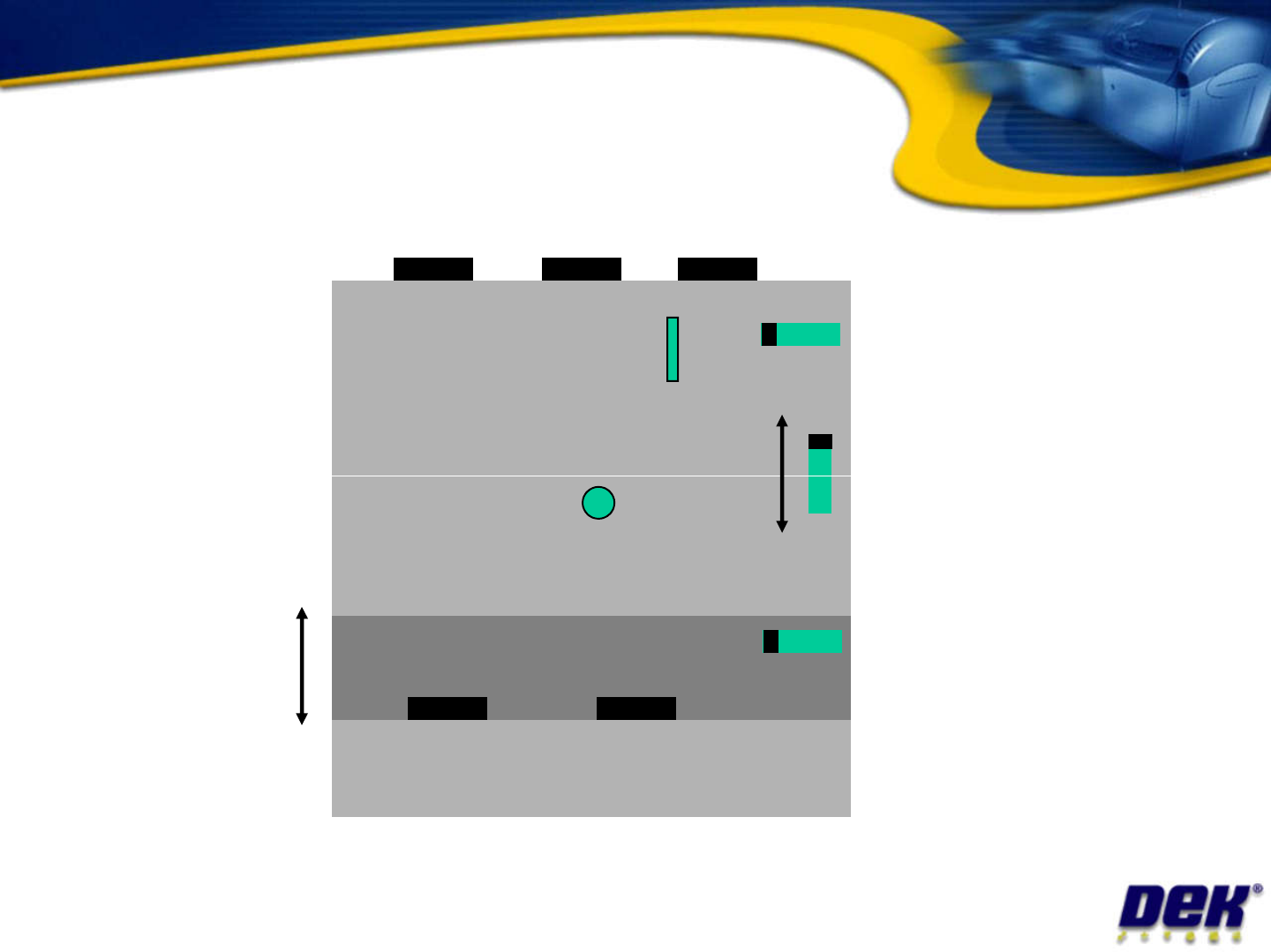
+24V
Logic
Supply
+24V
Logic
Supply
From BG9010 (Dunker motor)
Or
Berger Lahr motor assembly
Objective 14: Complete details in workbook
Nodes
Rising
Table motor
(Dunker)
Node 6
Main
Machine
Node 2
Screen
Cleaner
Node 4
Camera ‘Y’
(on motor)
Node 9
Camera ‘X’
(on motor)
Node 8
NextMove ES Card
Node 1 - CAN Master
Rising
Table motor
Issue 2: July 2007
Front of Machine
(Plan View)
Print
Carriage I/O
Node 3
Paste
Dispense
Node 10
Print Carriage
(on motor)
Node 7
Node 8
Print
Carriage
Table motor
(Berger Lahr)
Node 6

•
Communicates via CAN bus
•
Multiple sensor inputs
•
Multiple outputs including solenoid drives
Main machine I/O node 2
Issue 2: July 2007
Power & CAN Bus
activity LED’s
Check Knowledge
base for issue
status and related
articles