3MAINTENANCE__O.pdf - 第138页
3.6 Device Check INPUT CHECK - INTERLOCK - , , Display ( Fig . 3.39 - 1 ) u < ! KPUI CHECK • INTERLOCK - > 02 / 02 P O R T N A M E : I N T L K 1 1 < ! NPUT CHECK 》 12 / 12 I N P U T N A M E I N P U T N A M E STA…
3.6
Device
Check
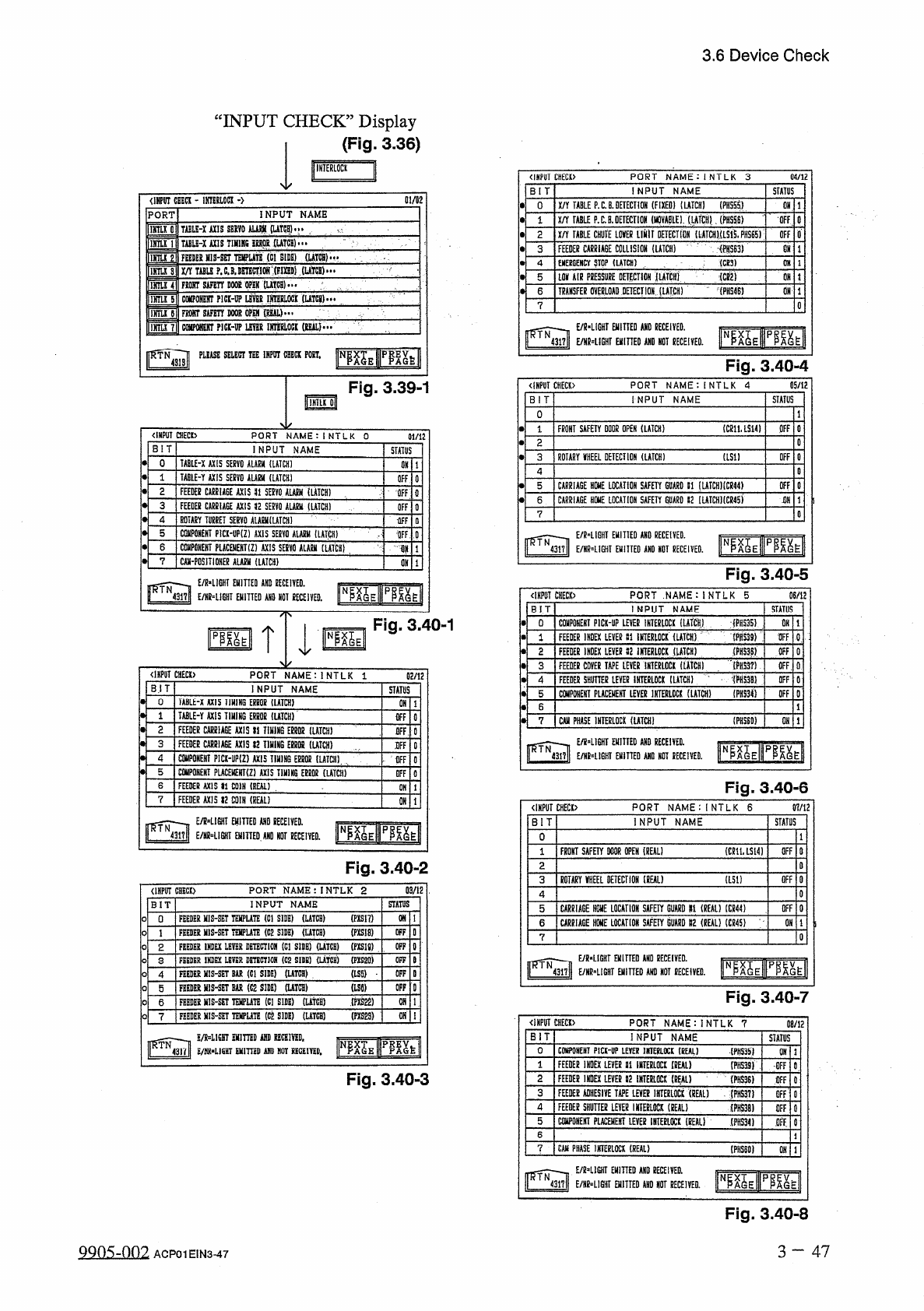
u
INPUT
CHECK
”
Display
(
Fig
.
3.36
)
INTERLOCK
PORT
NAME
:
INTLK
3
<
INPUT
CHECK
〉
04
/
12
INPUT
NAME
BIT
STATUS
01
/
02
(
INPUT
GHECX
-
1
NTSRL
0
CI
-
>
X
/
Y
TABLE
P
.
C
.
B
.
DETECT
10
H
(
FIXED
)
(
LATCH
)
(
PHS
55
)
m
TABLE
P
.
C
.
B
.
OETECriOH
(
HOVAffLE
)
(
.
LATCH
)
,
(
PHS
56
)
X
/
Y
TABLE
CHUTE
LCWR
UiUt
DETECTfOK
{
OTiaSlS
.
PBS
65
)
;
0
ON
INPUT
NAME
PORT
OFF
.
0
1
Imfll
TABLE
-
X
AXIS
SERYO
AlARM
(
LATCH
)
0
2
OFF
TABLH
-
X
AXIS
T
1
H
1
HG
S
零
(
LATCB
)
…
rnni
i
FEEDER
CARRIAGE
COL
11
SION
UAICH
)
(
PHS
63
)
8
H
3
FEEDER
HI
5
-
SET
TEffUTH
(
Cl
SlDi
)
OATCK
”
X
/
Y
TABU
P
.
C
.
B
.
DnECTIOH
;
(
FIHDl
(
lAtCW
…
IHTU
2
EMERGENCY
STOP
(
LATCH
}
;
jCT
3
j
4
OH
IKTLX
3
m
AIR
PBE
5
SUKE
DETECHOH
UATCH
^
細
ON
5
FiOHT
SAFETT
DOOR
OPEK
(
UTCB
)
.
.
.
腿
4
ON
TRAHSfEg
OVEBLOAP
DEIECT
10
H
.
(
LATCH
)
mm
6
C
0
HF
0
NEHT
PICI
-
UP
LETEK
ISWRLOGi
(
UTC
|
)
1
HTII
5
7
0
mm
SAFETY
DOOR
OPffl
咖
…
imi
6
CflMPMMT
P
1
CMJP
LEYBR
IKTERLOCI
咖
…
E
/
HICHT
EUITTEO
AMO
RECEIVED
.
E
/
HH
16
HT
EliinED
AND
NOT
RECEIVED
.
|
N
^
Sel
|
pg
^
£
RTN
PLEASE
SELECT
THE
IHPW
CHECK
MET
.
43
IS
Fig
.
3.40
-
4
Fig
-
3.39
-
1
05
/
12
<
IHP
0
[
CHECK
〉
PORT
NAME
:
[
NTLK
4
WTD
|
BIT
INPUT
NAME
STATUS
0
FRONT
SAFETY
D
008
OPEH
{
LAICR
}
{
CR
1
USU
)
OFF
0
<
INPUT
CHECt
>
PORT
NAME
:
INTLK
0
01
/
12
2
0
BIT
INPUT
NAME
STATUS
ROTARY
VHEEL
DETECTION
(
LATCH
)
(
LS
1
J
OFF
0
3
0
TA
8
LE
-
X
AXIS
SERVO
ALARM
{
LATCH
】
OK
0
4
TABLE
-
Y
AXIS
SERVO
AUW
(
LATCH
)
1
OFF
0
CARRIAGE
HOME
LDCAT
10
H
SAFETY
GUARD
81
(
UTCH
)(
CR
44
)
5
OFF
0
FEEM
8
CARBiAGE
AXIS
U
SEBVO
.
ALASM
(
LATCH
)
2
OFF
fl
CARRIAGE
HOME
LOCATION
SAFETY
GUARD
82
{
UTCKHCR
45
)
AH
6
3
FEEDER
CA
8
B
1
ASE
AXIS
112
SERVO
ALABM
(
UTCH
)
OFF
0
7
0
4
ROTARY
TURRET
SERVO
AIASU
(
UTCH
)
m
Q
COMPONENT
PICI
-
UP
(
Z
)
AXIS
SEfiYO
ALAfiU
(
LATCH
)
5
OFF
0
E
/
fKIGHT
EUITIED
AND
RECEIVED
.
E
/
NR
=
L
!
GHT
EMITTED
AND
NOT
RECEIVED
.
iiNPm
吳
y
6
COXPOHEHT
PUC
£
MEHT
(
Z
?
AXIS
SESVO
ALAU
(
LATCH
)
U
7
CAM
-
POSITIONER
ALA
&
ii
(
LATCH
)
ON
Fig
.
3.40
-
5
E
/
M
16
HT
EMITTED
AND
BECEiVEO
.
4317
E
/
NHiGHT
EMITTED
AND
NOT
&
ECE
1
VE
0
.
FTN
<
1
HPDT
CHECK
)
PORT
NAME
:
INTLK
5
06
/
12
BIT
INPUT
NAME
STATUS
QK
Fig
.
3.40
-
1
COMPONEHT
PICK
-
UP
LEVEB
IHTEBLOCt
(
LAffcH
)
;
|
PHS
35
)
0
Is
fm
i
、
〆
FEEDER
INDEX
LEVER
111
1
KTERL
0
CK
(
UTCH
)
.
麵
)
OFF
i
0
.
OFF
2
FEEDER
1
HDEX
LEVER
12
IKTERLOCI
;
(
UTCH
)
0
FEEDER
COYER
TAPE
LEVEI
!
IKIEHLOCK
(
LATCH
)
'
曲
S
3
?
)
0
3
OFF
<
1
«
PUT
CHECK
)
PORT
NAME
:
INTLK
1
02
/
12
1
PHS
3
B
1
FEEDER
5
HUTTEB
tHEB
IHTEfiLOCK
(
LATCH
)
4
OFF
0
BJT
INPUT
NAME
STATUS
COMPOHEHT
PtACEHEHT
LEVER
lNTERLOCR
(
LATCH
)
(
PHS
3
«
5
OFF
0
0
TABLE
-
X
AXIS
TIMING
ERBOK
(
LATCH
)
ON
1
6
TABLE
-
Y
AXIS
TIUING
ERROR
(
UTCH
)
1
m
0
CAU
PHASE
INTERLOCK
(
UTCH
)
7
(
PHSBD
)
QH
•
2
FEEDER
CAK
81
AGE
AXIS
tl
TiWKS
EBRQS
(
LATCH
)
妍
0
1
E
/
8
*
L
16
HT
EMITTED
廳
RECEIVED
.
17
E
/
H
8
=
L
1
GHT
EIUTTED
AND
KOT
fiECEIVED
.
•
3
FEEDER
CARRIAGE
AXIS
12
TIMIK
&
EBROS
(
UTCH
)
1
卜臨
1
陋
I
XFF
0
•
4
COMPONENT
PICIHP
⑵
AXIS
TUUN
6
EMM
(
LATCH
)
m
0
5
COUPOHEKT
PLACEMENT
⑵
AXIS
T
1
UIN
6
HM
(
UTCH
)
OFF
0
Fig
.
3.40
-
6
6
FEEDER
AXIS
II
COIN
(
REAL
)
OH
FEEDER
AXIS
12
COIN
(
REAL
)
7
ON
<
IKP
«
T
CHECK
〉
PORT
NAME
:
INTLK
6
07
/
12
E
/
R
»
UGHI
EU
1
HED
m
8
ECE
1
VED
.
E
/
WKI
8
HT
EHITTEO
.
AHD
KOI
RECEIVED
.
INPUT
NAME
BIT
STATUS
陋
0
FROKT
SAFETY
OCOR
OPEN
{
REAL
}
(
CRiUSi
4
)
OFF
D
1
Fig
.
3.40
-
2
2
0
ROTARY
mi
DETECTION
(
REAL
) (
LSI
)
OFF
0
3
PORT
NAME
:
INTLK
2
03
/
12
<
1
HPUT
CHBCD
0
4
STATUS
INPUT
NAME
BIT
CARRIAGE
HOME
10
MTI
0
H
SAFETY
GUARD
Rl
(
REAL
)
(
CR
44
)
OFF
0
5
FEEDER
HIS
-
SET
TEHPUTH
(
Cl
SIDE
)
(
UTCB
) (
PIS
!
?
)
ON
0
o
CARRIAGE
HOME
LOCATIOK
SAFETY
6
UA
8
D
82
(
REAL
) (
»
45
}
OH
6
FEEDER
M
1
S
-
SHT
TEWIATI
(
C
2
S
】
阳
(
UTCB
)
(
PXS
18
)
11
OFF
o
0
7
FEEDER
INDEX
LEYER
BETHCTIOH
(
Cl
SIDE
)
(
LATCH
)
(
PXS
18
)
FEEDER
IKCH
LEVER
DETECT
10
H
(
C
2
SIDE
)
(
LATCH
)
~
(
PXS
20
[
OFF
0
2
o
E
/
R
«
UGHT
Dli
[
T
£
D
AND
RECEIVED
.
E
/
NMIGHT
EMITTED
AND
HOI
8
ECEIVED
.
OFF
D
3
ff
^
l
o
N
FEEDER
HIS
-
SET
m
(
Ci
SIDE
}
(
UTCB
)
(
IS
5
)
OFF
D
4
o
FEEDER
MiS
-
SBT
BAR
(
C
2
SIDE
)
(
UTC
5
)
OFF
0
(
LS
6
)
5
o
Fig
.
3.40
-
7
細
)
OB
FEEDH
2
HIS
-
SET
TEHPUTB
(
Cl
SIDE
)
(
UTCH
)
FEEDER
MIS
-
SET
TEMPLATE
(
C
2
SIM
) (
UTCB
)
6
o
ON
(
PXS
23
)
o
<
1
HPUT
CHECK
》
PORT
NAME
:
INTLK
7
08
/
12
BIT
INPUT
NAME
I
/
R
4
I
6
HT
HHITTEDillD
KCEIYBD
,
E
/
MR
-
LI
6
IT
ElUTTiD
廳
KOT
RECEIVED
.
STATUS
ME
rg
^
fel
N
o
CDHPOHEHT
PiCMIP
LEVEg
IMIKLOCt
(
REAL
)
譯
35
)
QN
3
fPHS
33
)
mm
INDEX
IEVER
«
mum
IBEAU
1
OFF
Fig
.
3.40
-
3
FEEDER
INDEX
LEVEB
12
lHTERLDCnBEAl
) (
PHS
36
)
FEEDER
ADHESIVE
TAPE
LEVEil
IHTEglOCt
(
mi
)
.
(
PBT
2
OFF
0
3
OFF
0
FEEDEB
SHUTTEK
LEVER
IK
7
EBL
0
CK
(
BEAU
4
(
PHS
38
)
OFF
0
5
OTONEKT
PLACEMENT
IEVE
£
INTEBLOCK
(
BEAU
(
PKS
34
)
.
OFF
,
0
6
?
CAU
PHASE
IJffESlOCS
(
REAL
}
(
PHS
60
)
OH
1
—
E
/
JK
1
GH T
EMITTED
AKD
RECEIVED
.
4317
E
/
NB
=
L
!
GHT
EMITTED
AND
NOT
BECEiVEO
.
ITfN
觀
PP
^
E
N
Fig
.
3.40
-
8
3
一
47
QQ
05
-
002
ACP
01
E
1
N
3
-
47

3.6
Device
Check
INPUT
CHECK
-
INTERLOCK
-
,,
Display
(
Fig
.
3.39
-
1
)
u
<
!
KPUI
CHECK
•
INTERLOCK
-
>
02
/
02
P OR T
N A M E
:
I N T L K
1 1
<
!
NPUT
CHECK
》
12
/
12
I N P U T
N A M E
I N PUT
N A M E
STATUS
B I T
m
TABLE
P
.
C
.
B
.
DETEC
710
H
(
FIXED
)
(
REAL
)
■
-
NOZZLE
FALL
DETECT
10
H
(
REAL
)
(
fXS
21
)
O FF
0
0
NOZZLE
HEIGHT
DETECTIQH
(
U
7
CH
)
Off
0
1
PAUSE
BEBUEST
(
IATCH
)
-
§
T
0
P
tpEST
(
UTCH
)
-
ON
2
NOZZLE
HEIGHT
DEIECTIOH
(
REAL
)
3
ON
4
OH
OFF
5
0
O FF
6
0
7
OK
E
/
B
-
LIGHT
EMITTED
AND
RECEIVED
.
E
/
HR
-
LI
6
HT
EifiTTEO
AID
NOT
CECEiYED
.
.
FMlFfia
Ka
llN
^
sJpg
艮如
PLEASE
SELECT
THE
INPUT
CHECK
PORT
Fig
.
3.39
-
2
Fig
.
3.40
-
12
ITiNTuTd
P O R T
N A M E
:
I N T L K
8
09
/
12
<
INPUT
CHECK
〉
SfATUS
I N P U T
N A M E
B I T
m
TABLE
P
.
C
.
B
.
OETECTIOK
(
FIXED
)
(
BEAU
(
PHS
55
)
ON
0
m
TABLE
P
.
C
.
B
.
DET
£
CriOH
{
MOVABLE
)
(
REAL
)
(
PHS
56
)
OFF
0
.
1
m
TABLE
CHUFE
LWEB
LIMIT
DETECTiQH
.
tREAl
)
(
PHS
65
,
PHS
70
)
m
TABLE
CHUTE
LWER
UMII
DEIECTIOH
(
2
)
(
REAL
)
(
LSIOO
)
OFF
0
,
2
0
OFF
3
0
4
0
5
0
6
0
7
E
/
BHI
6
HI
EUifTED
AND
SECEIVEO
.
E
/
NIKIGKr
EHITTED
AND
NOT
RECEIVED
.
Fig
.
3.40
-
9
pro
FW
P O R T
N A M E
:
1
N T L K
9
《
INPUT
CHECK
〉
10
/
12
B I T
I N P U T
N A M E
STATUS
0
0
0
2
3
NOZZLE
HEIGHT
DETECTION
HATCH
)
(
PXS
21
)
OFF
0
4
0
5
6
7
E
/
R
=
LIGHT
BUTTED
AMD
RECEIVED
.
E
/
NB
=
IIGHT
EMITTED
AMD
NOT
RECEIVED
.
MM
IS
Fig
.
3.40
-
10
P O RT
N A M E
:
)
N T L K
1 0
ONPUT
CHECK
〉
11
/
12
I N PUT
N A M E
STATUS
BIT
0
0
1
0
2
3
1
4
0
PAUSE
REQUEST
(
LATCH
)
OFF
0
5
OK
STOP
REQUEST
(
LATCH
)
6
ROVER
OFF
REQUEST
(
LATCH
)
OH
?
E
/
8
=
UGHT
EMITTED
AND
RECEIVED
.
E
/
HM
1
GHT
EHITTED
AHD
HOT
RECEIVED
.
Fig
.
3.40
-
11
3
-
4 8
990
^
002
ACP
01
EIN
3
-
48
3.6
Device
Check
u
INPUT
CHECK
”
Display
(
Fig
.
3.36
)
3
MOTOR
CONTROL
<
HiPUT
mi
>
PORT
NAME
:
M
DD
-
i
<
!
HPUT
CHECK
-
UOIOS
COHTKOL
-
)
01
/
06
01
/
44
BIT
PORT
INPUT
NAME
INPUT
NAME
STATUS
0
COUUNO
DISABLE
HDD
-
1
HEAD
SI
(
COMHAHD
(
COMMAND
DISABlE
;
H
0
T
0
g
,
B
[
}
5
Y
-
DgTPIJI
-
l
ON
UOTOR
BUSY
1
HDD
-
2
HEAD
12
D
15
ABLf
.
iJ
5
Y
.
0
…
r
.
OFF
0
HEAD
13
(
COHMAHD
DISABIE
^
OTOB
81
)
打
,
0
讥卩讥
…
}
HEAD
14
(
DQ
D
DiSABlE
^
DIOE
BUSY
•
QtlTPUI
…
}
~
2
VACUUM
SOLEKOID
(
SVI
)
HDD
-
3
OFF
0
3
IX
BAN
6
E
HDfl
-
4
OFF
0
iOCSPOSITIliH
4
OFT
HEAD
15
(
COKMAKD
D
1
SABLEW
;
BUSY
-
OyiPUT
-
•
)
*
>
flFF
0
HEAD
16
(
COMMAHD
DlSitBLE
-
MOIOB
BUSY
-
OUTPUT
-
*
j
5
mi
咖
OFF
.
OFF
0
6
HEAD
17
(
COMHAHD
0
】
SABLE
.
麵
BUSY
-
lDliTPlII
—
}
am
u
BD
:
8
All
HEAD
tB
(
COUHAHD
DlSABLE
'
-
MOTQg
BUSY
-
OUTPIIT
—
)
7
CQUHIKICATIOH
ERROR
ON
E
/
K
1
BHT
EMIHED
AND
RECEIVED
.
E
/
HR
-
UGHT
EMITTED
AND
NOT
RECEIVED
.
.
»
邛茲
EMP
践心
II
PLEASE
SELECT
THE
INPUT
CHECK
PORT
Fig
.
3.42
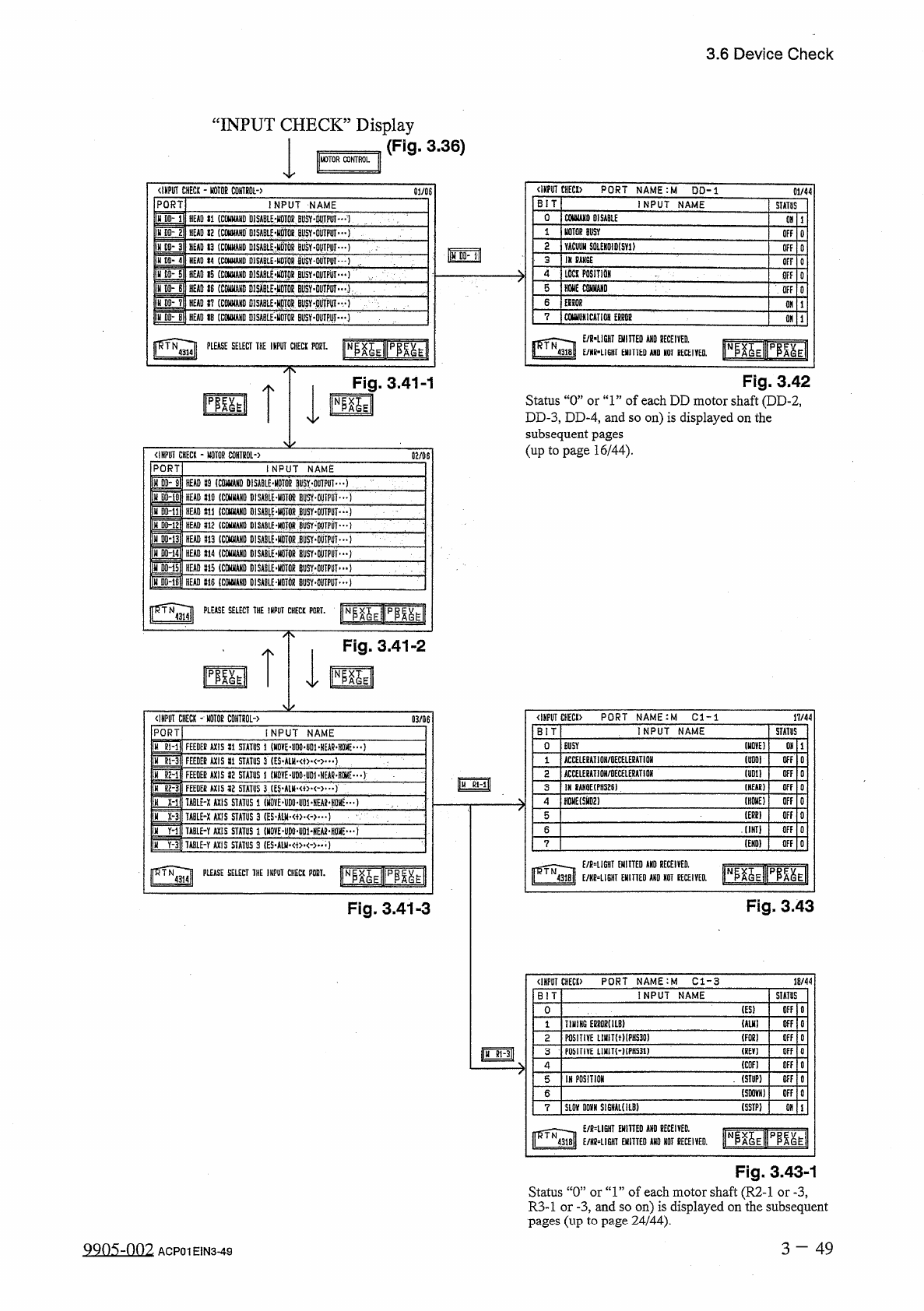
Status
“
0
”
or
“
1
”
of
each
DD
motor
shaft
(
DD
-
2
,
DD
-
3
,
DD
-
4
,
and
so
on
)
is
displayed
on
the
subsequent
pages
(
up
to
page
16
/
44
)
.
Fig
.
3.41
-
1
HmE
\
y
<
INPin
CHECK
-
H
0
T
0
R
CONTROL
-
〉
(
I
2
/
0
S
PORT
INPUT
NAME
HDD
-
9
HEAD
89
{
COMHD
mi
D
1
SAGLE
-
M
070
B
BUSt
-
OUTPUT
—
)
DISABLE
-
MOTOfi
BUSY
-
DllIPin
—
]
»
DD
-
IO
HEAD
010
HEAD
m
(
COMAKD
DISABLE
•
MTOR
BUSY
-
OIITPUT
—
)
H
PHI
HEAD
U
2
(
CDMHAffl
DISABLE
.
MOT
评
gUSY
.
DOT
唢
…
1
HEAD
m
3
tCQMHmD
DISABU
.
呱
OR
JUSY
加
IPtIT
…
1
(
COHUAXP
DISABiE
-
HQfOR
BUSY
»
0
t
)
TPliT
»
»
)
H
DD
-
12
M
DD
.
13
OH
4
HEAD
#
14
DISABLE
-
MOTOR
BUSY
-
OUTPUT
-
)
U
DD
-
15
HEAD
m
(
C
D
OIAIAKD
iTDH
6
HEAD
Bi
6
(
C
DISAaii
-
MQTOfl
BUSY
-
OUTPUT
—
)
PLEASE
SELECT
THE
1
HPUT
CHECK
PORI
.
Fig
.
3.41
-
2
Fun
vl
/
<
INPUT
CHECK
>
PORT
NAME
:
M
Cl
一
1
17
/
44
<
1
NPUT
CHECK
-
M
CONTROL
-
)
03
/
0
$
INPUT
NAME
BIT
STATUS
PORT
f
gHl
INPUT
NAME
(
U
0
VE
)
0
BUSY
OH
FEEDEB
AXIS
SI
STATUS
1
(
MDV
^
UD
0
«
t
)
Dl
*
NEAR
*
H
0
HE
••
-
)
Off
ACCELERMI
0
K
/
DECELEBATI
0
U
(
UD
0
)
0
[
OH
]
FEEDER
AXIS
Hi
STATUS
3
(
ES
,
AUHtw
-
>
FEEDEB
AXIS
«
STATUS
1
(
腑
E
觀唧
UEAHlk
…
)
:
W
1
H
\
ACttLERATIOH
/
OECELERATlOH
(
UDll
OFF
2
0
!
N
8
腿
(
PHS
26
!
(
KEW
)
3
OFF
0
[
OF
!
]
FEEDER
^
XIS
«
2
STATUS
3
(
ES
;
AlH
»
<
i
>
-
<
-
>
—
)
酬
E
(
S
如
2
) (
HOME
)
Off
4
0
mi
TABLE
-
X
AXIS
STATUS
1
{
H
0
VE
-
«
D
0
-
UD
1
*
KEA
8
*
P
^
-
)
圃
5
OFf
0
irai
TABLE
-
X
AXIS
STATUS
3
{
ES
-
ALM
-
«
>
-
<
-
>
—
)
.
HHT
)
OFF
6
0
FTTI
TABLE
-
Y
AXIS
STATUS
1
(
MOVE
.
UpO
.
ODHEAHtm
(
EN
0
)
OFF
7
0
TABLH
AXIS
STATUS
3
(
ES
-
Al
»
»
<
i
>
-
<
-
>
-
«
<
}
E
/
R
=
IIGHT
EMITTED
AND
RECEIVED
.
E
/
HM
1
SHI
EHinED
AND
XOT
KECEIYE
0
.
«
N
^
5
EIPP
^
eI
.
rMUMil
PLEASE
SELECT
THE
INPUT
CHECK
POUT
Fig
.
3.43
Fig
.
3.41
-
3
《
INPUT
CHECK
〉
PORT
NAME
:
M
Cl
—
3
18
/
44
INPUT
NAME
STATUS
BIT
(
ESI
0
OFF
0
TIMING
EKQKdLB
}
{
AUO
OFF
0
POSITIVE
L
!
HIT
{
t
)
{
PHS
30
}
(
FOR
)
Off
0
2
POSITIVE
LIH
!
T
(
-
)
{
PHS
31
)
(
REV
)
OFF
0
3
(
CDF
)
OFF
0
4
.
(
SIUP
)
5
IN
POSITION
Off
0
(
SD
0
VH
)
Off
6
0
SL
0
V
00
VH
SiGNAL
{
lLB
)
(
SSIP
)
ON
?
E
/
R
=
LISHT
mmo
AK
0
RECEIVED
.
E
/
MKI
6
HT
EMITTED
AH
0
NOT
RECEIVES
.
11
NP
^
EII
1
PP
^
EI
1
Fig
.
3.43
-
1
Status
“
0
”
or
“
1
”
of
each
motor
shaft
(
R
2
-
1
or
-
3
,
R
3
-
1
or
-
3
,
and
so
on
)
is
displayed
on
the
subsequent
pages
(
up
to
page
24
/
44
)
.
3
-
4 9
9905
-
002
ACP
01
EIN
3
-
49