KD-2077_SPE_JP.pdf - 第22页
18 7 インターフェース 7 - 1 機械的イ ン タ ーフ ェ ー ス 7- 1- 1 基板搬送高さ 900 ± 2 0mm 950 ± 2 0mm ( オプシ ョン ) 7 - 2 電気的イ ン タ ーフ ェ ー ス 7- 2- 1 電気信号の 種類と意味 本装置と 相手側機械に 関わ る 電気信号の 接続概念図を 「 図 12 電 気信号の 接続 概念図 」 に示 します。 図 12 の中で 、 本装置と 上流装置と の 間① …

17
6
制御系
6-1 記憶方式
生産プログラムはSSD(注1)、フロッピーディスク(オプション)に保存可能。生産管理情報は
SSDに保存可能です。
注1:SSDとは記憶媒体としてフラッシュメモリを用いたHDDに変わるドライブ装置(ソリッド ステート ドライブ)
です。
6-2 生産プログラム容量
1回路当たり最大ステップ数: 3,000ステップ
1基板当たり最大回路数: マトリックス回路数1200、非マトリックス回路数200
1基板当たり最大ステップ数: 10,000ステップ
最大部品データ数: 240
最大接着データ数: 240
最大マーク登録数: BOCマーク 1組(2~3個)
6-3 ポインティングデバイス
マウス
タッチパネル(オプション)
6-4 入出力データフォーマット
テキスト形式(XML形式)の入出力をサポートします。
18
7
インターフェース
7-1 機械的インターフェース
7-1-1 基板搬送高さ
900±20mm
950±20mm(オプション)
7-2 電気的インターフェース
7-2-1 電気信号の種類と意味
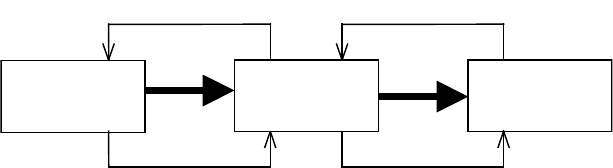
本装置と相手側機械に関わる電気信号の接続概念図を「図12 電気信号の接続概念図」
に示します。 図12 の中で、本装置と上流装置との間①②、及び下流装置との間③④の
電気信号を以下に示します。
a) 電気信号①は搬出要求入力信号(または、ボードアベイラブルイン)と呼び、上流側
装置からプリント基板の搬出要求を受ける信号。
b) 電気信号②は搬出許可出力信号(または、レディーアウト)と呼び、上流側装置に対
しプリント基板を搬出させる信号。
c) 電気信号③は搬出要求出力信号(または、ボードアベイラブルアウト)と呼び、下流側
装置に対しプリント基板の搬出を要求する信号。
d) 電気信号④は搬出許可入力信号(または、レディーイン)と呼び、下流側装置からプ
リント基板の搬出許可を受ける信号。
下流側装置
③
①
②
④
本装置
上流側装置
図
12
電気信号の接続概念図
19
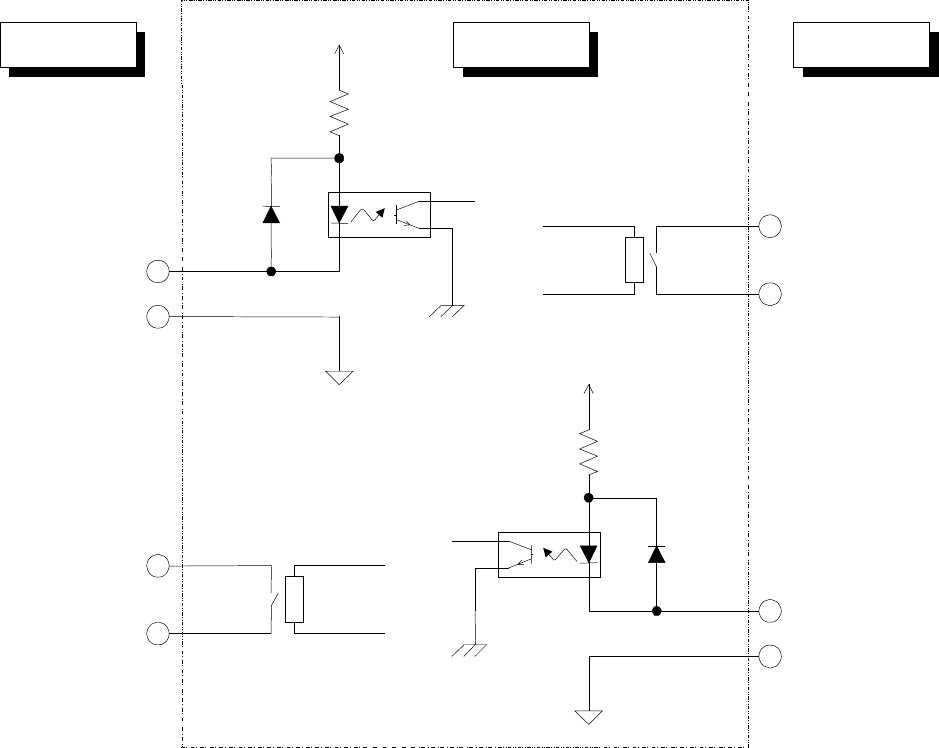
7-2-2 入力及び出力信号インターフェース
+24V
リレー接点
+24V
リレー接点
本装置
下流側装置
ピン番号:1
搬出要求入力信号
ピン番号:2
搬出要求信号コモン
ピン番号:3
搬出許可出力信号
ピン番号:4
搬出許可信号コモン
上流側装置
ピン番号:1
搬出要求出力信号
ピン番号:2
搬出要求信号コモン
ピン番号:3
搬出許可入力信号
ピン番号:4
搬出許可信号コモン
図 13 信号インターフェースと接続ターミナル
7-2-3 接続ケーブル仕様
JIS B 8438 産業用ロボット-電気装置に準拠。ケーブル長10m以内。
7-3 データインターフェース
• LANポート (10/100BASE T)
• USB 2.0相当 2ポート
データのインターフェースとしてFDD、CD-ROM等を接続(ともにオプション)
7-4 ユーティリティの接続
7-4-1 配管継手
φ8×φ12ホース用ワンタッチ型配管継手プラグ