JAKA Zu se使用手册-中文版.pdf - 第10页
10 JAK A Zu Se 第 6 章 附录 6.1 传感器 I 型说明 6.1. 1 概述 本款应变式 六轴力/ 力矩传感器 ,可同时检测 3 个力和 3 个力矩。该传感器 检测由施加 力引起的 “工具端法 兰”和“主体 ”之间的相对 变形, 并使用电阻 应变片测量传 感器弹 性单元的变化 。 该传 感器内 含嵌入式系统 , 可 以实时采集 并处理电阻应 变片的信号 变化, 实时输出施 加力的大 小和方向, 具有高精度 和高响 应能…

JAKA Zu Se 9
图 8. JAKA Zu se 运动终止编程
g.实时显示外力
在手动界面选择【查看】,可以实时显示接触外力值。值得注意的是,在手动模式,需要在力控【拖拽】模
式下,才能显示接触外力值。
图 9. APP 显示力界面
第 5 章 JAKA Zu se 使用注意事项
a. 集成的力觉传感器是精密仪器,请务必在手册指定的规格范围内使用本产品,特别是负载大于额定负载的使用
工况可能会导致产品故障,请确保力觉传感器的各个方向均在负载范围内;
b. 保证机器人传感器末端负载设置准确;
c. 保证传感器的 X+方向与机器人法兰的 X+方向一致;或者设置工具坐标系保证方向一致;
d. 保证进入力控之前,机器人的末端与外界环境没有接触力。
传感器安装螺栓拧紧扭矩参考值
公制
参考拧紧扭矩(Nm)
M2
0.4
M3
2.0
M4
4.0
M5
8.0
M6
13.0
M8
35.0
10 JAKA Zu Se
第 6 章 附录
6.1 传感器 I 型说明
6.1.1 概述
本款应变式六轴力/力矩传感器,可同时检测 3 个力和 3 个力矩。该传感器检测由施加力引起的“工具端法
兰”和“主体”之间的相对变形,并使用电阻应变片测量传感器弹性单元的变化。该传感器内含嵌入式系统,可
以实时采集并处理电阻应变片的信号变化,实时输出施加力的大小和方向,具有高精度和高响应能力。使用传感
器时,请正确安装以免对输出效果产生干扰。
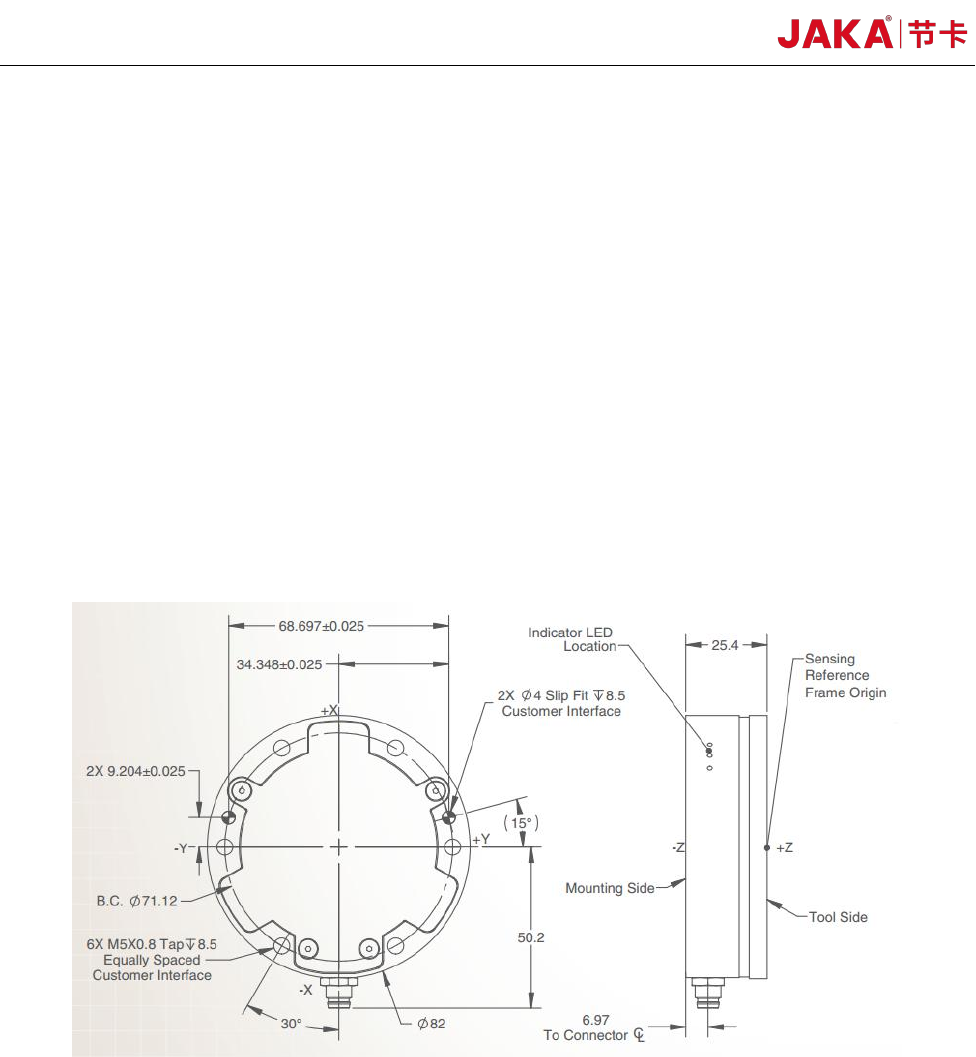
6.1.2 传感器安装
传感器安装孔位和安装尺寸如下。
JAKA Zu Se 11
传感器尺寸
a.安装前请检查安装设备、适配板、和传感器表面无损坏或异物。若由于夹杂异物等因素导致接触不均匀,
则待安装设备(或适配板)之间会形成间隙,无法保证产品的 IP64 性能,对实际传感器的输出效果也存在影响。
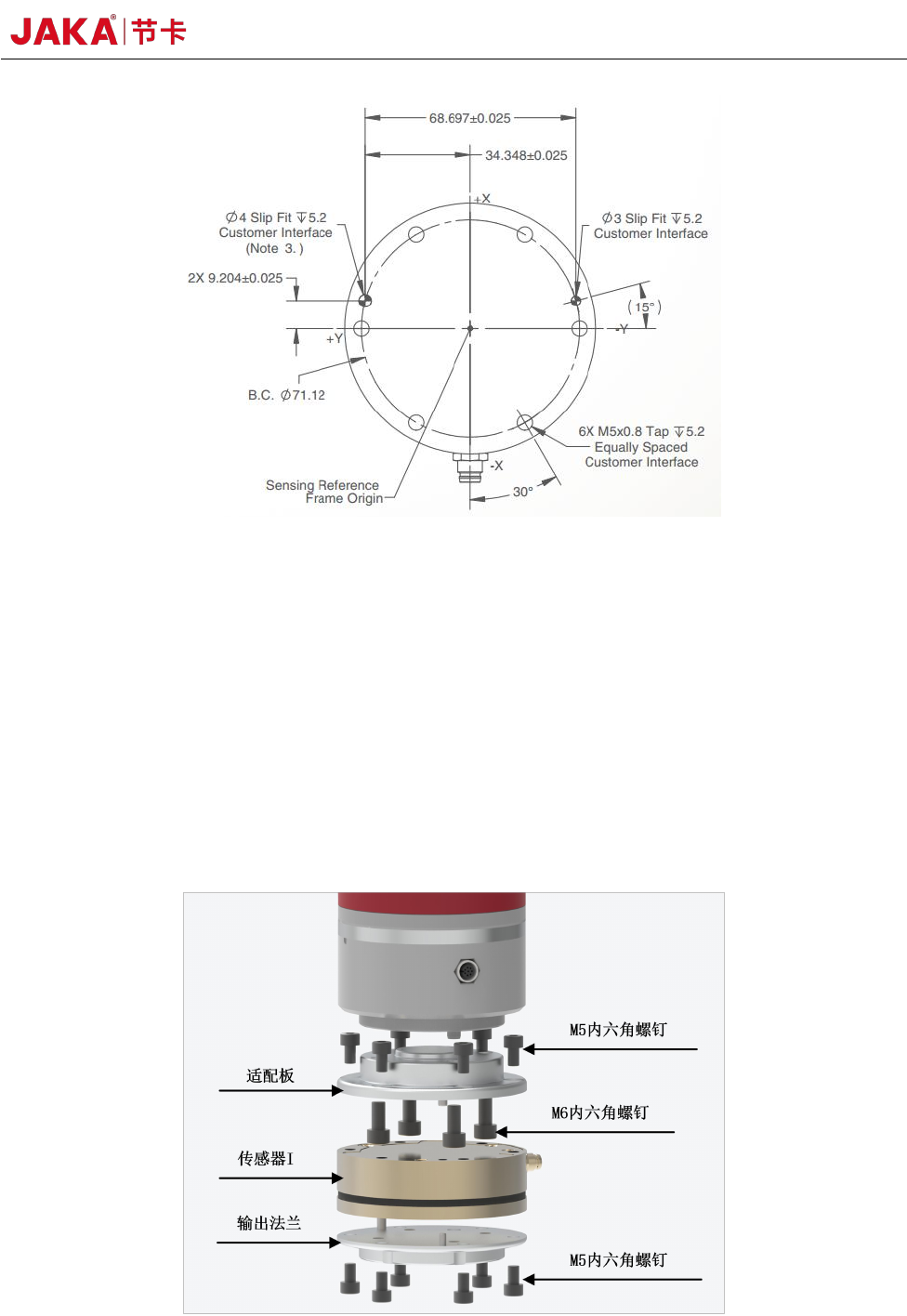
b.将传感器与适配板进行分离,并将适配板安装于机器人末端法兰。值得注意的是,在安装传感器前,通过
预安装,保证传感器坐标系的 XY 方向与机器人末端法兰坐标系的 XY 方向保证一致,即机器人末端法兰中心指向
TIO 方向与传感器的-Y 方向一致。如果安装方向不一致,会影响后续使用。
c.将传感器与适配板进行紧固连接。6 颗 M5 内六角螺钉采用对角线逐渐拧紧螺钉,使传感器与适配板能够均
匀接触。
传感器与设备连接安装示意图