JAKA Zu se使用手册-中文版.pdf - 第4页
4 JAKA Zu Se 第 1 章 概述 1.1 背景 随着人力成 本的不断攀升 , 3C 、 医药、 食品、 物流等行业开始寻 求机器 人自动化解决 方案。 这些新兴行 业中 的特点是产 品种类多, 更新 迭代快 、 对操 作人员的柔性 要求高 。 为了实现机 器人与人类一 起并肩 工作, 需要 提升 机器人本体 的感知能力, 机器人力觉 便应运而 生了。 1.2 目的 本产品旨在 采用工业级的 力觉传感器 ,并集成 自主知识产权 …

JAKA Zu Se 3
目录
第 1 章 概述
..................................................................................................................................................................
4
1.1 背景
......................................................................................................................................................................
4
1.2 目的
......................................................................................................................................................................
4
第 2 章 产品描述
...........................................................................................................................................................
5
第 3 章 JAKA ZU SE 系统搭建
..................................................................................................................................
6
第 4 章 JAKA ZU SE 使用
..........................................................................................................................................
6
第 5 章 JAKA ZU SE 使用注意事项
........................................................................................................................
9
第 6 章 附录
.................................................................................................................................................................
10
6.1 传感器 I 型说明
...............................................................................................................................................
10
6.2 传感器 II 型说明
.............................................................................................................................................
12
6.2 传感器 III 型说明
.............................................................................................................................................
18
4 JAKA Zu Se
第 1 章 概述
1.1
背景
随着人力成本的不断攀升,3C、医药、食品、物流等行业开始寻求机器人自动化解决方案。这些新兴行业中
的特点是产品种类多,更新迭代快、对操作人员的柔性要求高。为了实现机器人与人类一起并肩工作,需要提升
机器人本体的感知能力,机器人力觉便应运而生了。
1.2 目的
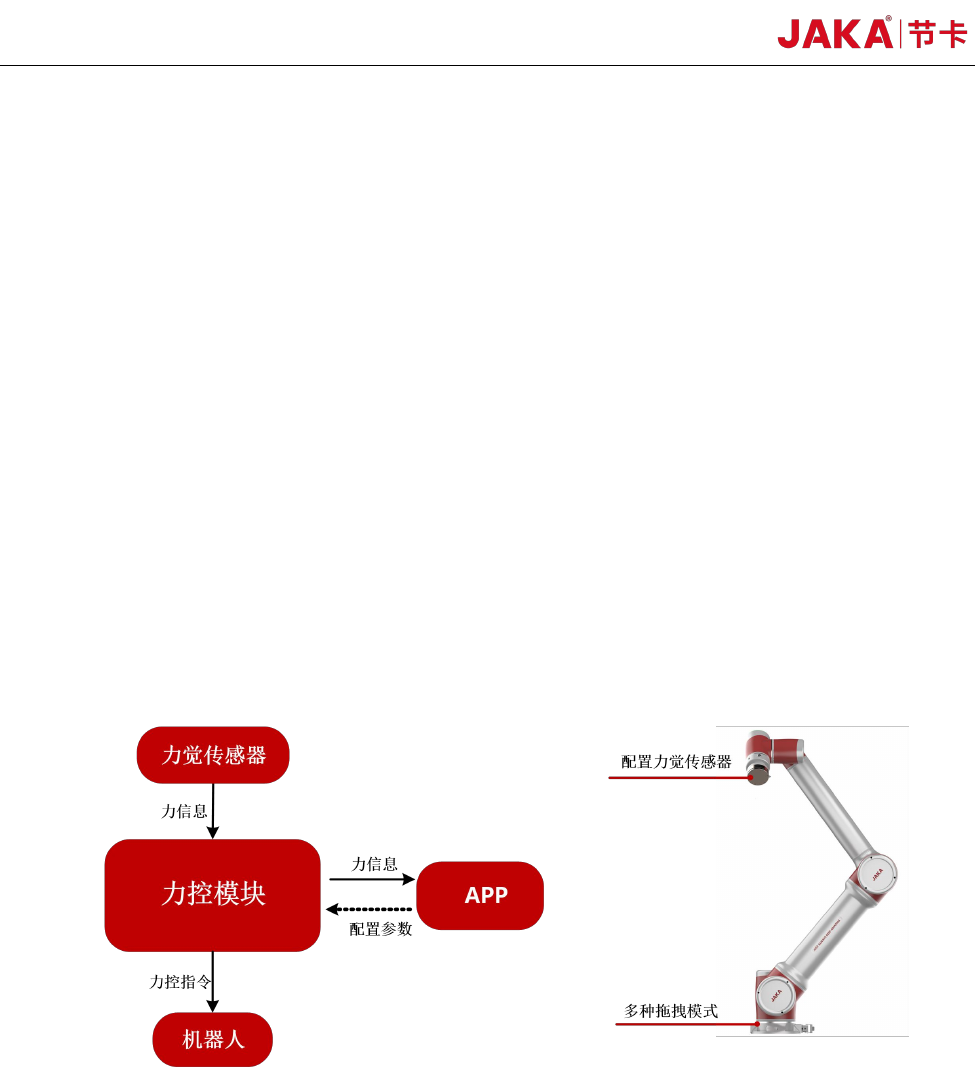
本产品旨在采用工业级的力觉传感器,并集成自主知识产权的力控算法,提高协作机器人本体的感知能力,
为客户提供更好的人机交互体验。如图 1 所示,将力觉传感器安装在机器人的末端法兰,实时将力值传给控制器,
当机器人末端执行器受到外力时,可以调整末端的位姿来适应外力值。同时,客户可以在机器人末端更加柔顺地
拖拽机器人的位置和姿态。
图 1. JAKA Zu se 功能示意图
JAKA Zu Se 5
第 2 章 产品描述
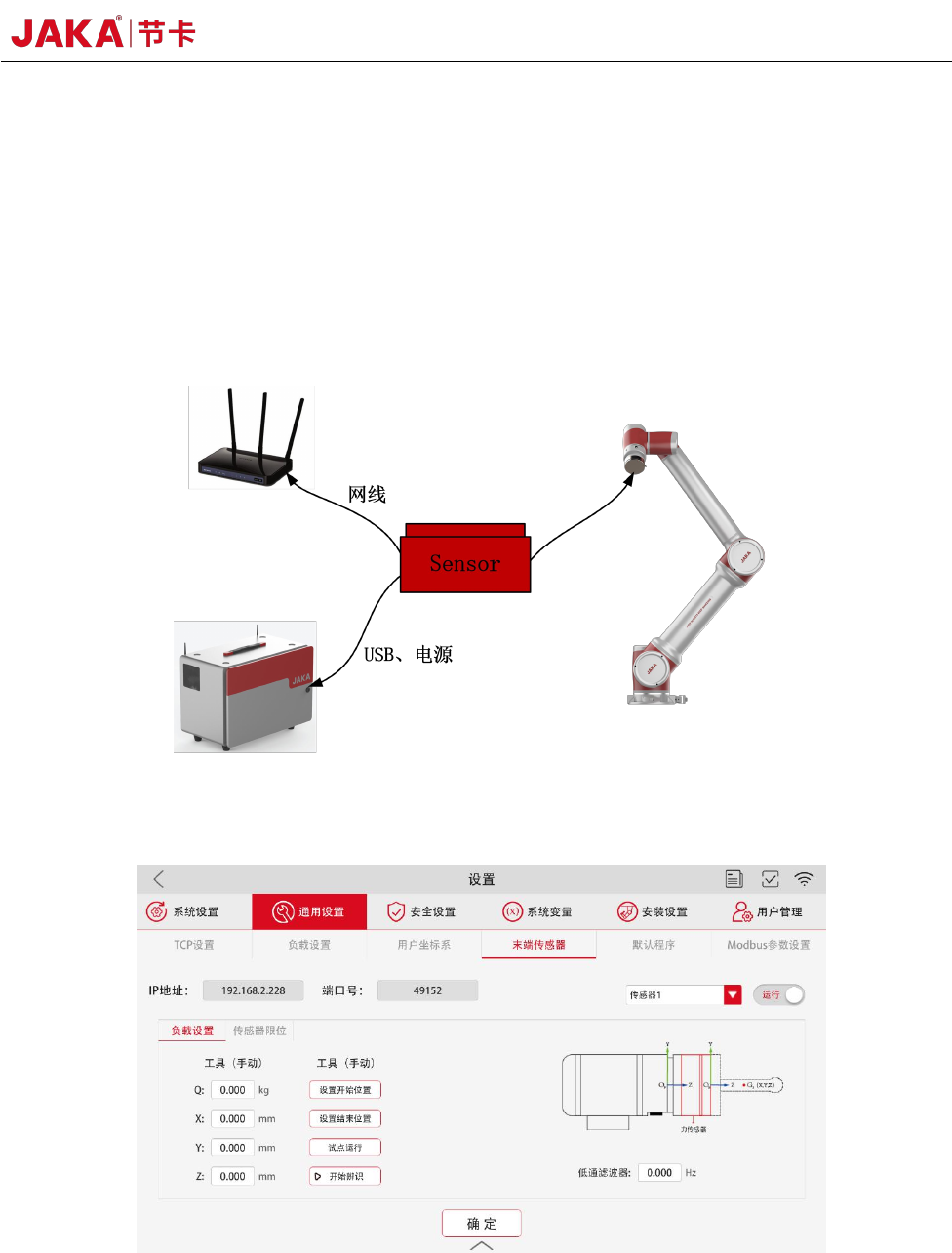
JAKA Zu se 系统包含 APP、机器人、控制柜和力觉传感器设备。如图 2 所示,力觉传感器和机器人末端法兰
通过机械连接。软件上的操作通过节卡小助 APP 中的力传感器模块来实现,如图 3 所示。
图
2. JAKA Zu se
系统示意图
图
3.
力传感器模块
APP
设置界面