JAKA Zu se使用手册-中文版.pdf - 第8页
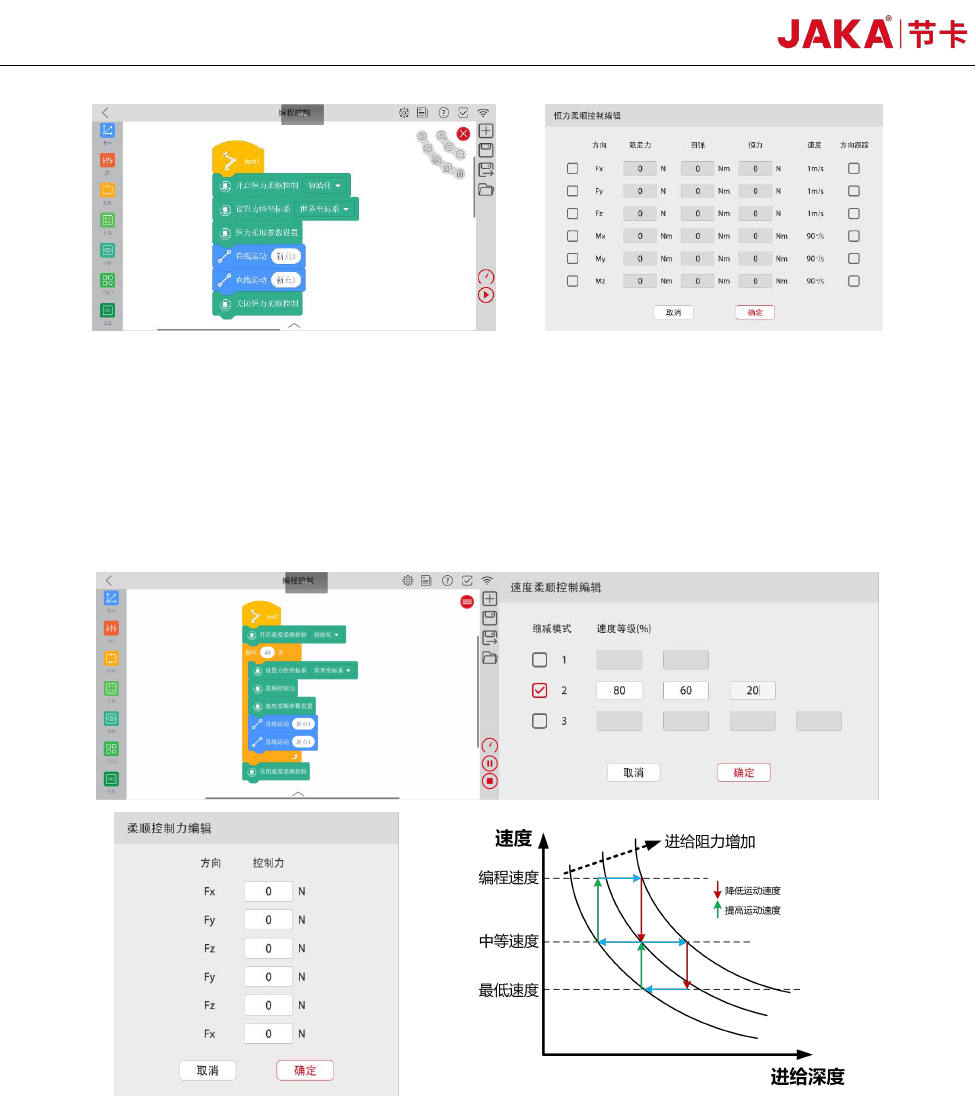
8 JAKA Zu Se 图 6. JAKA Z u se 恒力 模式编程 e. 速度模式 速度模式 , 当机 器人末端受 力大于控 制力设定值时, 机 器人会进 行减速, 直至传感 器检测值 小于控制力设 定 值。如图 6 所示,速度模式包 括【开启速度柔顺控制 】、 【速度 柔顺参数设置 】、 【柔顺控制力】和【关闭速度 柔顺控制】 。在【速度柔 顺参数设置 】界面, 配置速度阶梯 ,在【柔顺控 制力】 界面选择控制 力的大小。 图…
JAKA Zu Se 7
c.牵引示教功能
● 如图 3 所示,选择传感器类型,设置 IP、端口号、滤波和负载等之后,【确定】后【运行】,控制器开始
从传感器接收数据;
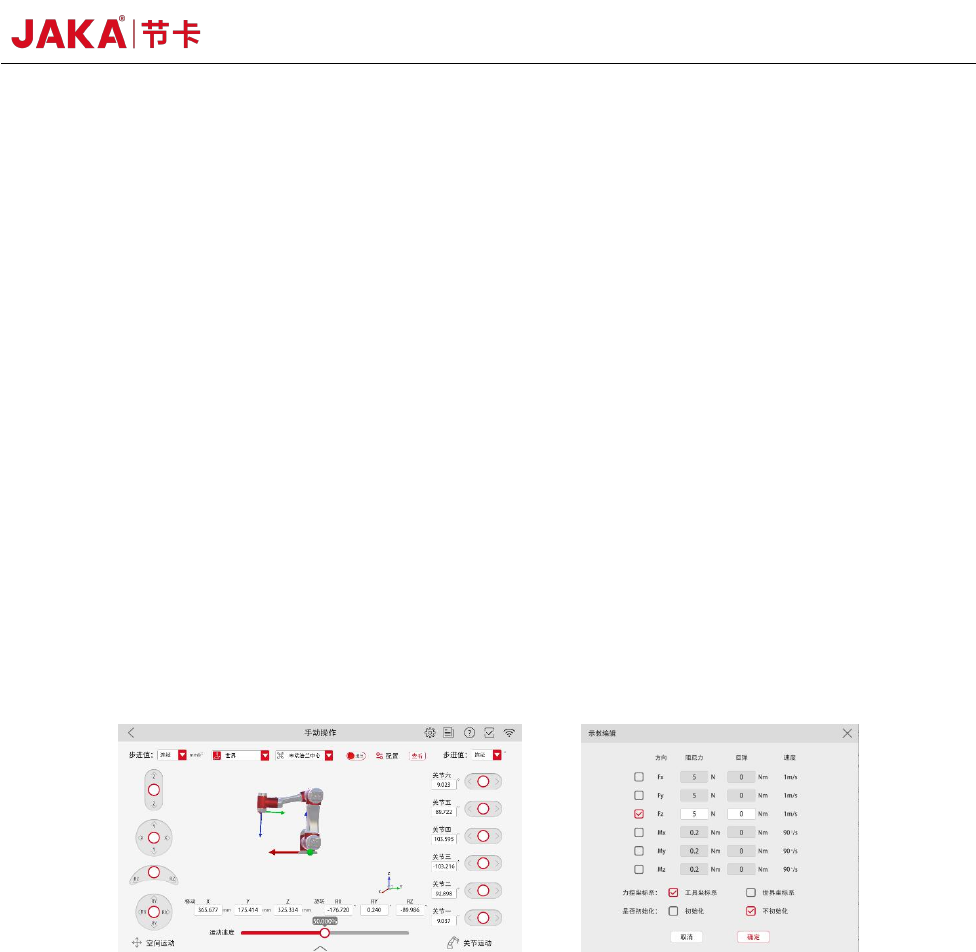
● 如图 4,进入【手动操作】,首先进入【配置】界面,其中 Fx、Fy、Fz 对应 X、Y、Z 三个方向的位移,
Mx、My、Mz 对应 X、Y、Z 三个方向的旋转;通过勾选【方向】前面的□,使能某个或某几个方向,即打
开拖拽后,可以在使能的方向上拖拽机器人;【阻尼力】设置越小,用户就需要越小的力拖拽,但并不是【阻
尼力】设置越小越好,建议 F 大于 10N,M 大于 0.2Nm,设置值不能为 0;【回弹】可以让机器人回到拖拽
之前的最初位置,设置值越大,需要越大的力拖拽机器人;
● 力控坐标系,勾选【工具坐标系】,则在设置的工具坐标系中拖拽机器人;勾选【世界坐标系】,则在机
器人底座坐标系中拖拽机器人;
● 是否初始化,控制器运行后,第一次进入拖拽模式,需要勾选【初始化】,对传感器的偏置和负载等进行
补偿,并且在进入拖拽的过程中保证机器人末端没有外力接触,否则会影响补偿精度;
● 配置好参数后,点击【确定】,再点击【退出】即进入【拖拽】模式,在进入拖拽模式之前,机器人末端
不应受到外力,否则会引起传感器补偿误差,造成危险。
● 由于传感器存在温漂等原因,如果在拖拽模式中,机器人位置出现漂移,请【退出】再进入【拖拽】,重
新进行传感器补偿;不使用牵引示教功能,请及时【退出】。
图 5. JAKA Zu se 牵引示教功能设置
d.恒力模式
恒力模式,可以保证机器人末端与外界环境之间的接触力在设定恒力值的范围之内。如图 5 所示,恒力模式
包括【开启恒力柔顺控制】、【设置力控坐标系】、【恒力柔顺参数设置】和【关闭恒力柔顺控制】。在【恒力
柔顺参数设置】界面,配置参数和牵引示教参数一致,用户可以根据希望接触力值来设定【恒力】值,【阻尼力】
的大小需要匹配外界的环境刚度,一般而言,环境刚度越大,需要的【阻尼力】值越大。由于传感器存在温漂,
建议机器人在跑一段时间后,确保机器人末端没有外力接触时,选择【初始化】,对传感器重新进行补偿。
8 JAKA Zu Se
图 6. JAKA Zu se 恒力模式编程
e.速度模式
速度模式,当机器人末端受力大于控制力设定值时,机器人会进行减速,直至传感器检测值小于控制力设定
值。如图 6 所示,速度模式包括【开启速度柔顺控制】、【速度柔顺参数设置】、【柔顺控制力】和【关闭速度
柔顺控制】。在【速度柔顺参数设置】界面,配置速度阶梯,在【柔顺控制力】界面选择控制力的大小。
图 7. JAKA Zu se 速度模式编程
f.运动终止条件
在运动终止条件设置界面,勾选需要监测的方向,设定上限值或者下限值;当接触外力值小于下限值时或者
大于上限值时,触发运动终止条件。【运动终止条件】监测紧邻的下一条运动指令,如果触发运动终止条件,机
器人会立刻从当前位置运动到下一条运动指令的结束位置。值得注意的是,必须在【恒力柔顺参数设置】中将所
有参数设置为 0,且不勾选任何方向。

JAKA Zu Se 9
图 8. JAKA Zu se 运动终止编程
g.实时显示外力
在手动界面选择【查看】,可以实时显示接触外力值。值得注意的是,在手动模式,需要在力控【拖拽】模
式下,才能显示接触外力值。
图 9. APP 显示力界面
第 5 章 JAKA Zu se 使用注意事项
a. 集成的力觉传感器是精密仪器,请务必在手册指定的规格范围内使用本产品,特别是负载大于额定负载的使用
工况可能会导致产品故障,请确保力觉传感器的各个方向均在负载范围内;
b. 保证机器人传感器末端负载设置准确;
c. 保证传感器的 X+方向与机器人法兰的 X+方向一致;或者设置工具坐标系保证方向一致;
d. 保证进入力控之前,机器人的末端与外界环境没有接触力。
传感器安装螺栓拧紧扭矩参考值
公制
参考拧紧扭矩(Nm)
M2
0.4
M3
2.0
M4
4.0
M5
8.0
M6
13.0
M8
35.0