JAKA Zu se使用手册-中文版.pdf - 第13页
JAKA Zu Se 13 传感器外观 传感器坐标 系定义 传感器主体 内置嵌入式采 集系统对应 变片的电 压信号进行实 时处理, 转换为实际 承受的载荷 值, 以数字信号 形式进行输 出。 传感器的电 气连接示意图 6.2.2 传感器安装 传感器安装 孔位和安装尺 寸如下。
12 JAKA Zu Se
d.将输出法兰与传感器输出端连接。输出法兰的机械接口与机器人末端法兰的机械接口一致。
6.1.3 传感器基本参数
Fx/Fy(N)
200
Fz(N)
360
Mx/My(Nm)
8
Mz(Nm)
8
过载水平(%)
500
准度(%)
0.5
精度(%)
0.1
防护等级
IP64
工作温度(℃)
5~80
供电电压(V)
12~24
通讯接口
Ethernet
系统分辨率(Bit)
16
精度:精度是多个测量值之间一致程度的评价指标,即传感器在输入量按统一方向做全程多次测试时,所得
的输出曲线一致性程度。重复性精度是输出误差的标准差与额定输出的百分比(%FS)。
准度:准度是测量值与真实值偏差程度的评价指标。准度是输出量与理论真值之间偏差量的标准差与额定输
出的百分比(%FS)。
6.1.4 使用注意事项
a.请勿在规格允许范围外的温度、湿度环境下使用。
b.接线必须完全正确。开启电源时请注意核对连接线缆的颜色是否按照本手册提供的形式进行一一对应连
接。如果在连接端子上出现错误,传感器的内部电路可能会短路并可能损坏,请务必注意并检查。
c.传感器中内置嵌入式系统等精密部件,本公司已进行相关的振动和冲击测试,但请注意产品跌落,过度震
动将会导致故障。
d.安装传感器过程中严禁敲打。特别是与适配板配合时,如因适配板加工等因素造成间隙配合较紧,请勿敲
打传感器,否则会对传感器性能造成损伤。
e.传感器安装完成通电后,建议预热一小时后进行工作。
f.传感器实际使用过程中,需考虑其上挂载设备的质量,以免超载。
g.使用过程中有任何疑惑或故障,请勿擅自进行尝试性操作,请直接联系本公司。
6.2 传感器 II 型说明
6.2.1 概述
本款应变式六轴力/力矩传感器,可同时检测 3 个力和 3 个力矩。该传感器检测由施加力引起的“工具端法
兰”和“主体”之间的相对变形,并使用电阻应变片测量传感器弹性单元的变化。该传感器内含嵌入式系统,可
以实时采集并处理电阻应变片的信号变化,实时输出施加力的大小和方向,具有高精度和高响应能力。使用传感
器时,请正确安装以免对输出效果产生干扰。
JAKA Zu Se 13
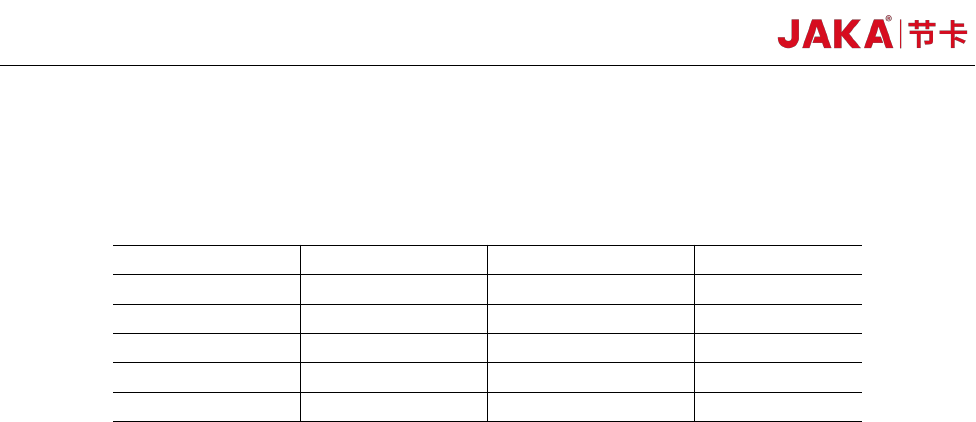
传感器外观
传感器坐标系定义
传感器主体内置嵌入式采集系统对应变片的电压信号进行实时处理,转换为实际承受的载荷值,以数字信号
形式进行输出。
传感器的电气连接示意图
6.2.2 传感器安装
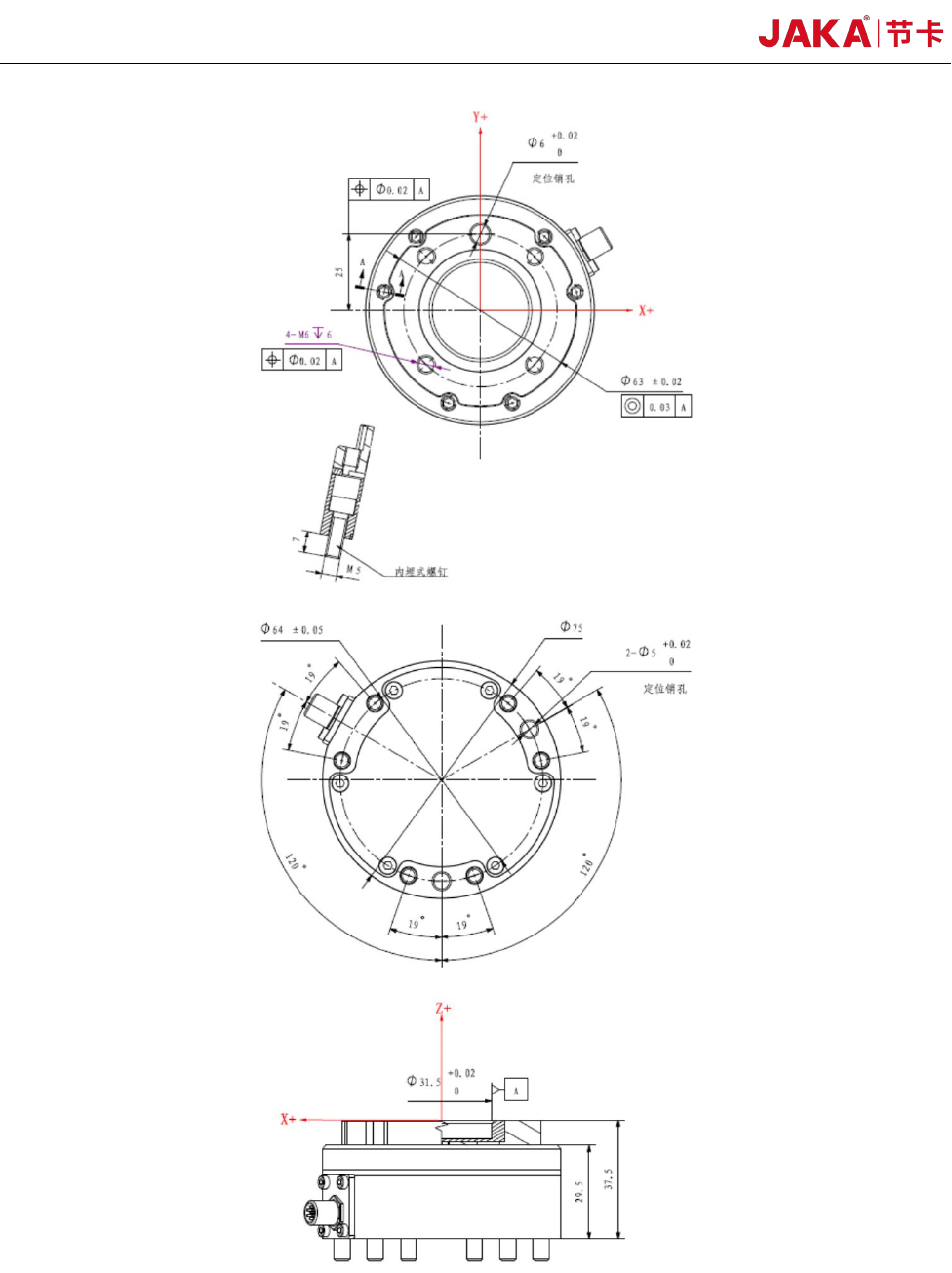
传感器安装孔位和安装尺寸如下。
14 JAKA Zu Se
传感器尺寸
拧紧螺钉的过程,请按照图示的对角线顺序逐渐拧紧螺钉。使传感器与待安装设备或转接工装能够均匀接触。