FX3_MCP_Rev1.0_C.pdf - 第21页
机器控制参数 系统参数 设定项目 输入范围 项目 最小值 最大值 单位 备考 设置 参照 设置 控制周期 …
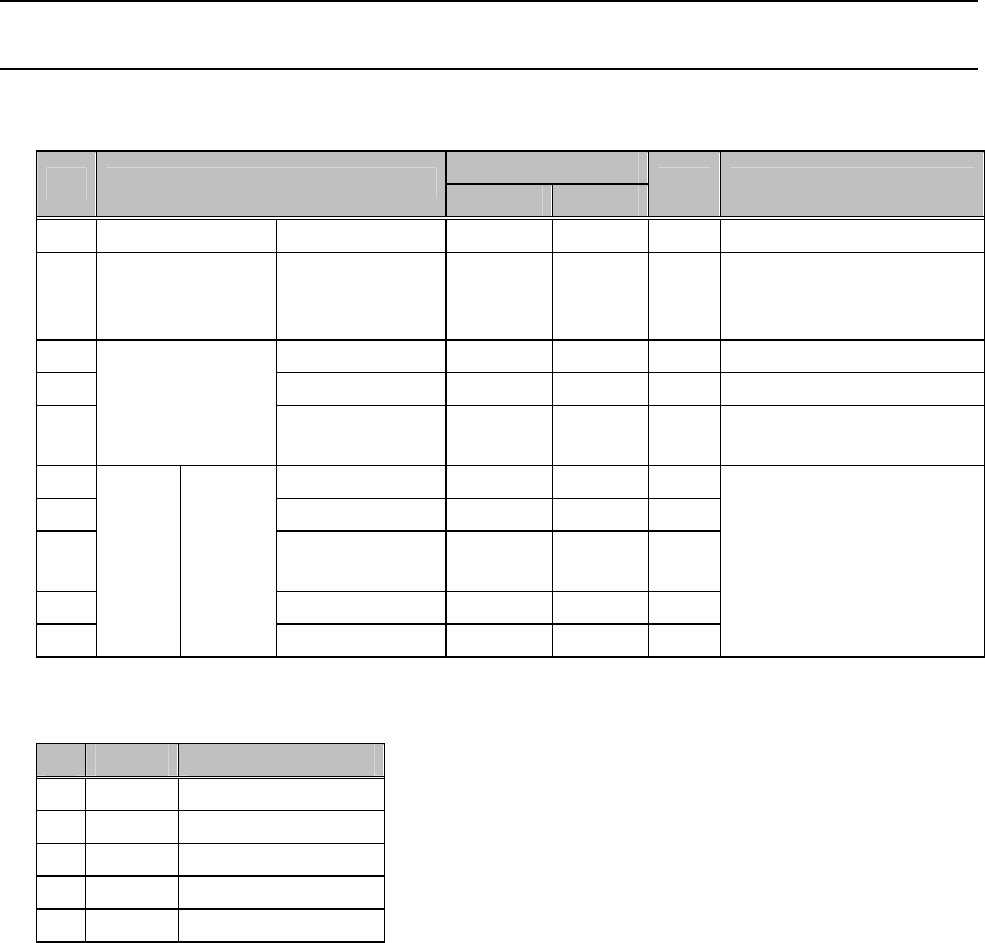
机器控制参数
设定项目
输入范围
项目
最小值 最大值
单位 备考
轴号
脉冲的轴分
辨率
动作区分 参照 动作区分
增益表索引 参照 增益表索引
动作以外
数据
移动结束触发器
预备
加速度
减速度
最高速度
反冲击率
动
作以外
数据
轴控制
参数
加减速时常数
设定上限值
实际的轴控制参数是行程
和移动时间动态计算的此
时轴控制参数也为三角驱
动
动作区分轴
类别 内容
打开安全盖
基础属性
单步
返回原点
~ 预备
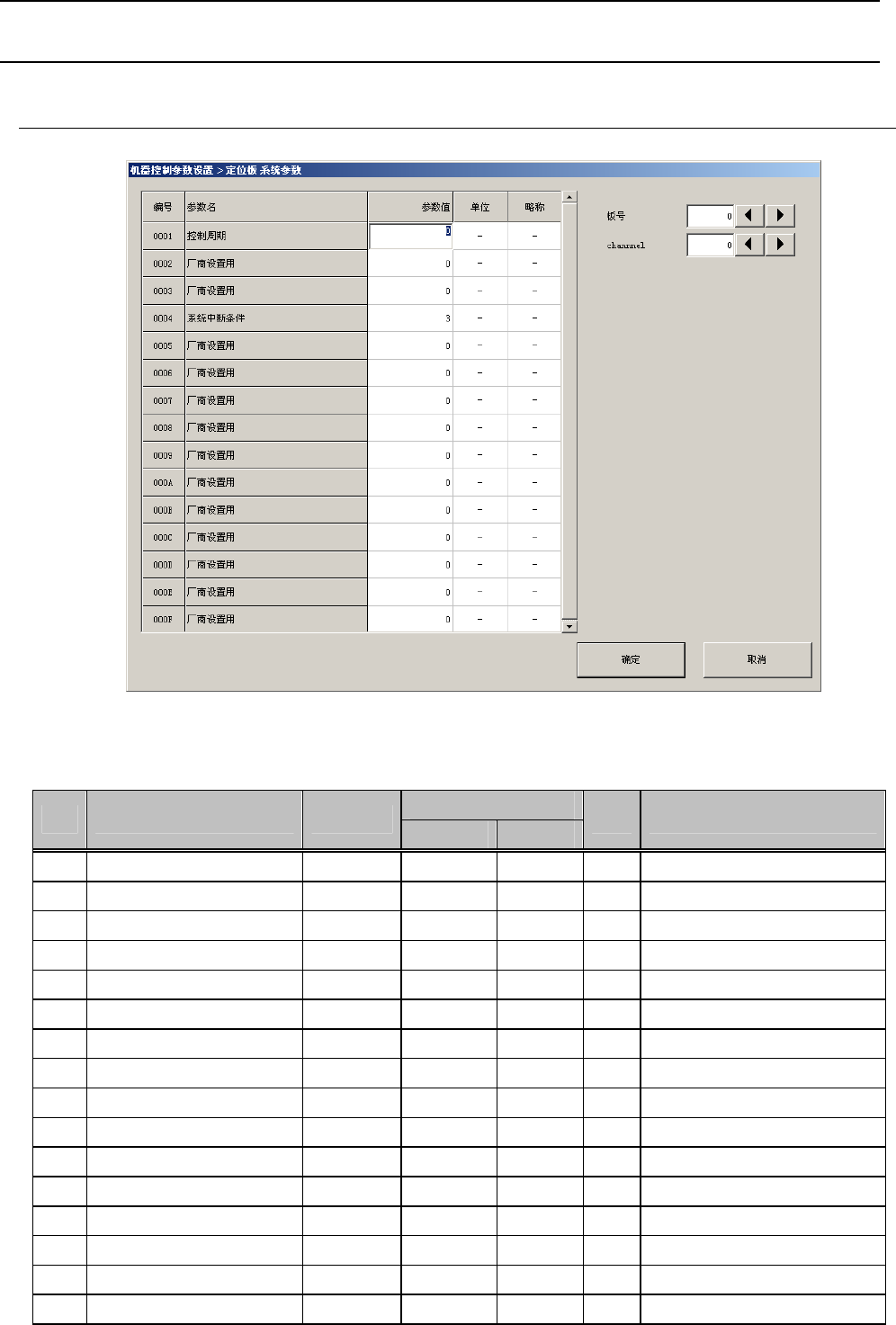
机器控制参数
系统参数
设定项目
输入范围
项目
最小值 最大值
单位 备考
设置 参照设置
控制周期
厂商设置用
厂商设置用
系统中断条件
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
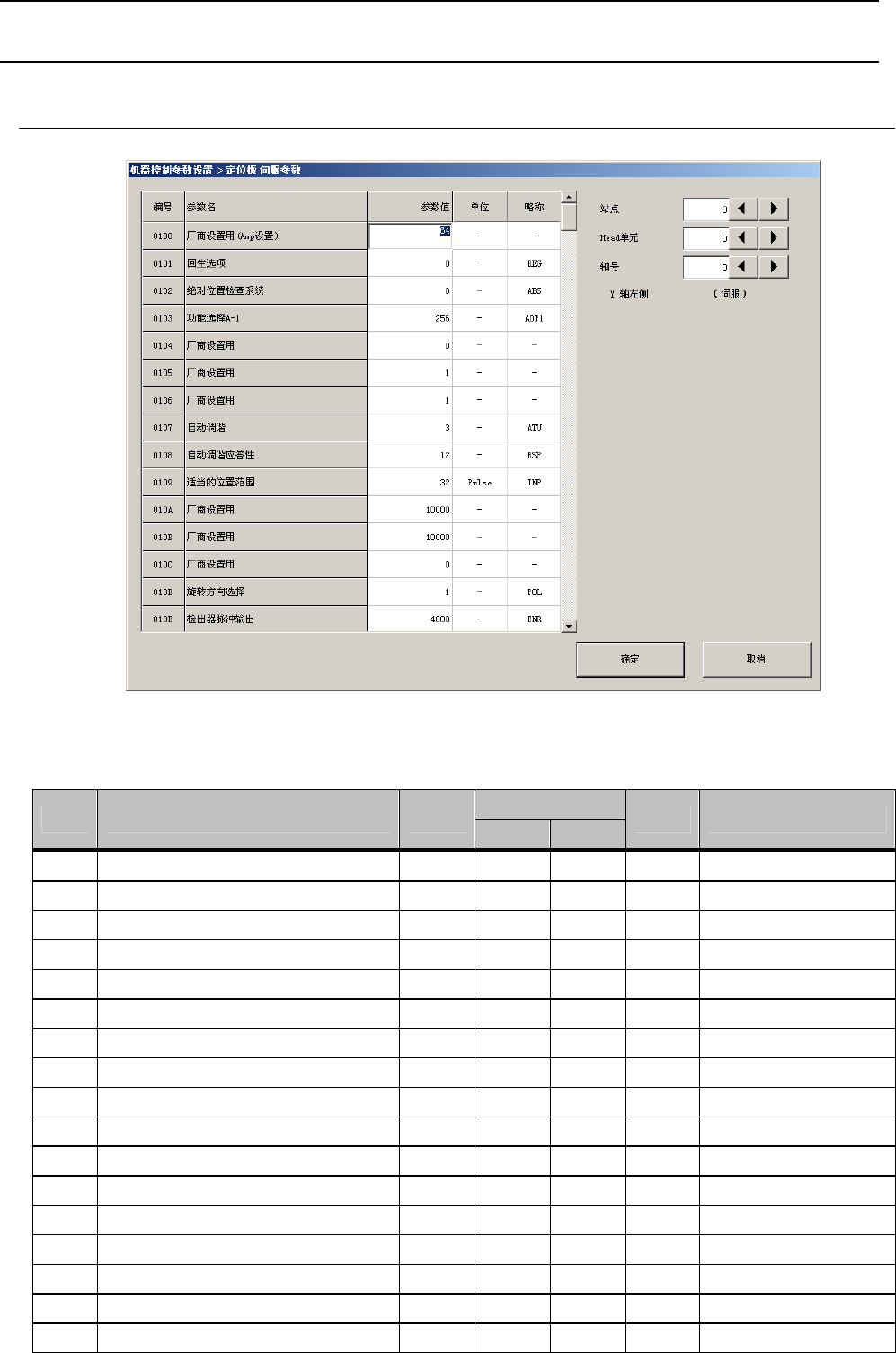
机器控制参数
伺服参数
设定项目
输入范围
项目 略称
最小值 最大值
单位 备考
厂商设置用设置
回生选项
绝对位置检查系统
功能选择
厂商设置用
厂商设置用
厂商设置用
自动调谐
自动调谐应答性
适当的位置范围
厂商设置用
厂商设置用
厂商设置用
旋转方向选择
检出器脉冲输出
检出器脉冲输出
马达系列