FX3_MCP_Rev1.0_C.pdf - 第68页
机器控制参数 示教步骤控制 接近界限时的 低速(脉冲) 、 高 速(脉冲) 、 低速→高速转换时间 仅 轴使用 设定项目 输入范围 项目 最小值 最大值 单位 备考 移动类型 �…
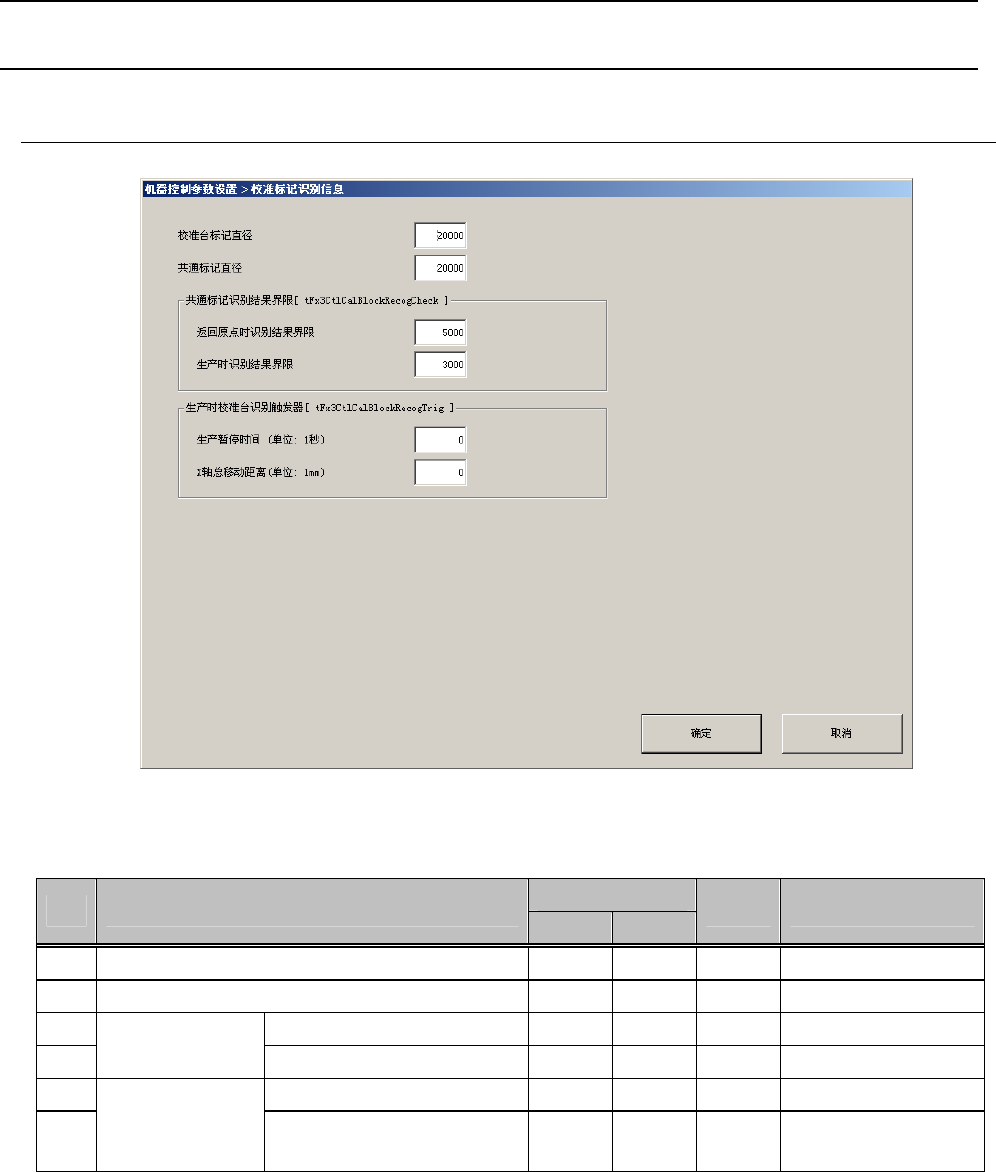
机器控制参数
校准标记识别信息
设定项目
输入范围
项目
最小值 最大值
单位 备考
校准台标记直径 μ
共通标记直径 μ
返回原点时识别结果界限μ
共通标记识别结
果界限
生产时识别结果界限μ
生产暂停时间单位秒
生产时校准台识
别触发器
轴总移动距离
单位
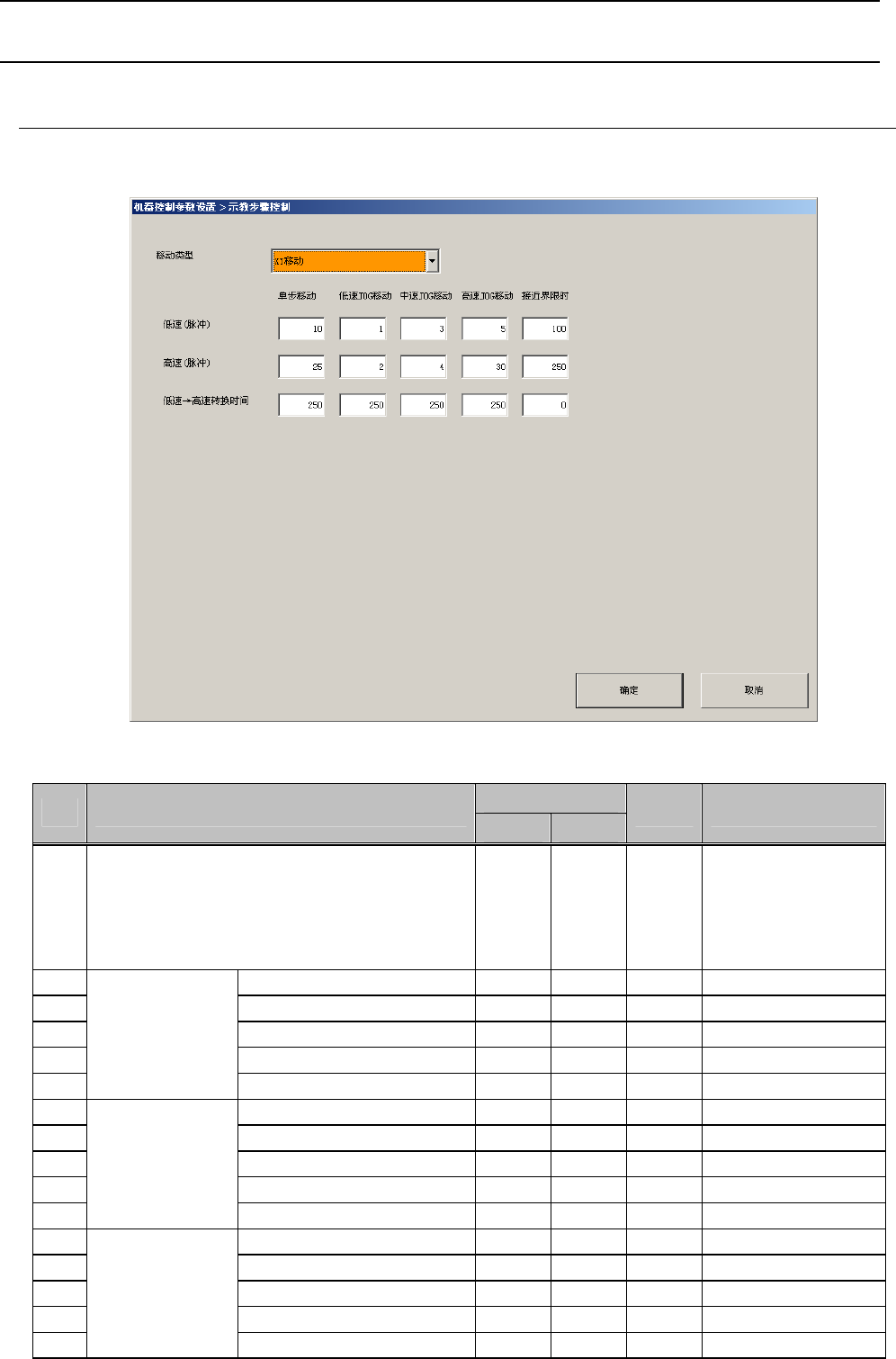
机器控制参数
示教步骤控制
接近界限时的低速(脉冲)、高速(脉冲)、低速→高速转换时间仅轴使用
设定项目
输入范围
项目
最小值 最大值
单位 备考
移动类型
移动
移动
移动
支撑台移动
移动
单步移动
低速移动
中速移动
高速移动
低速脉冲
接近界限时
单步移动
低速移动
中速移动
高速移动
高速脉冲
接近界限时
单步移动
低速移动
中速移动
高速移动
低速高速转换
时间
接近界限时
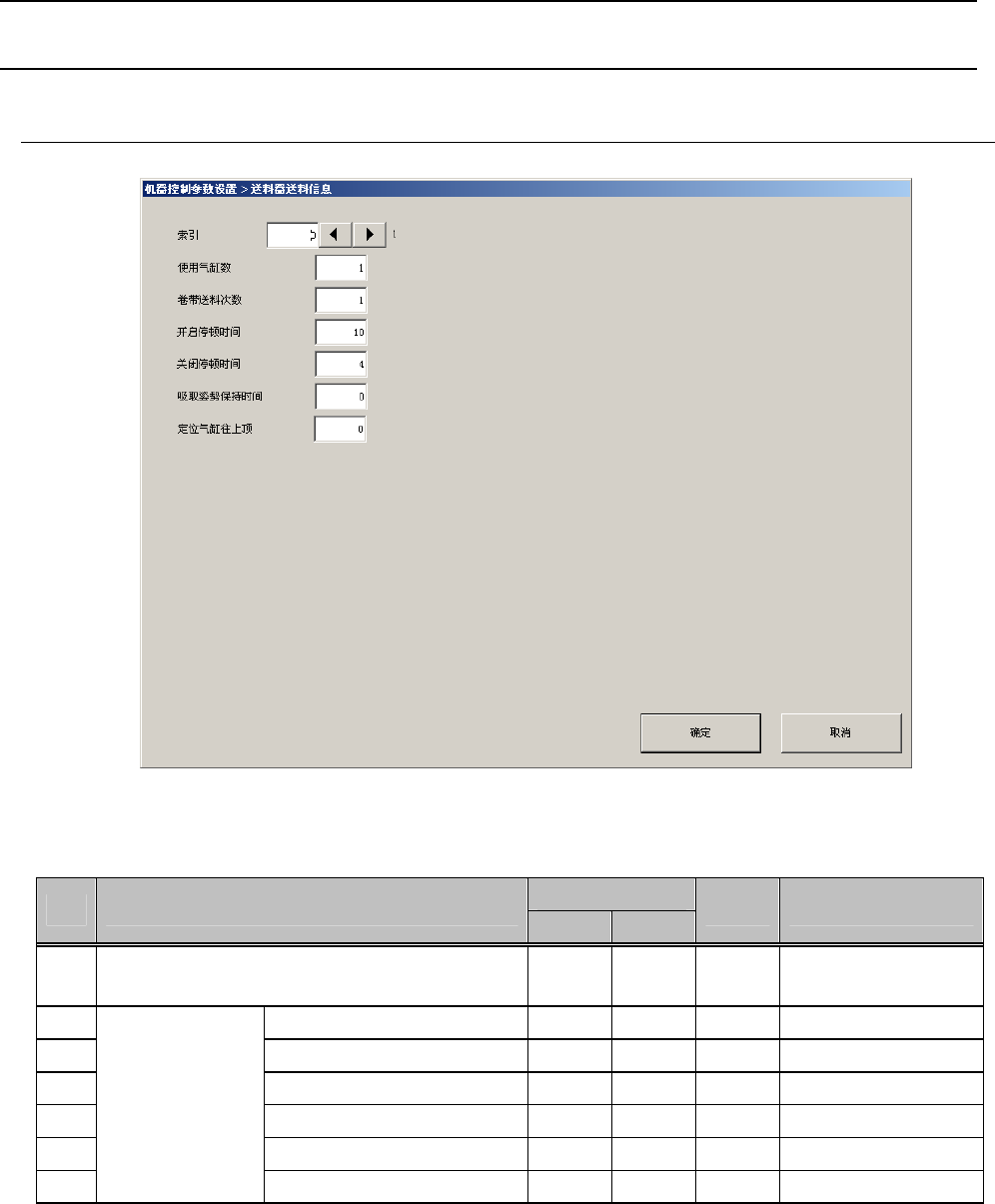
机器控制参数
送料器送料信息
设定项目
输入范围
项目
最小值 最大值
单位 备考
索引
参照 索
引
使用气缸数
卷带送料次数
开启停顿时间
关闭停顿时间
吸取姿勢保持时间
送料器送料信息
定位气缸往上顶 不使用