FX3_MCP_Rev1.0_C.pdf - 第70页
机器控制参数 索引 类别 内容 宽 送 宽 送 宽 送 宽 �…
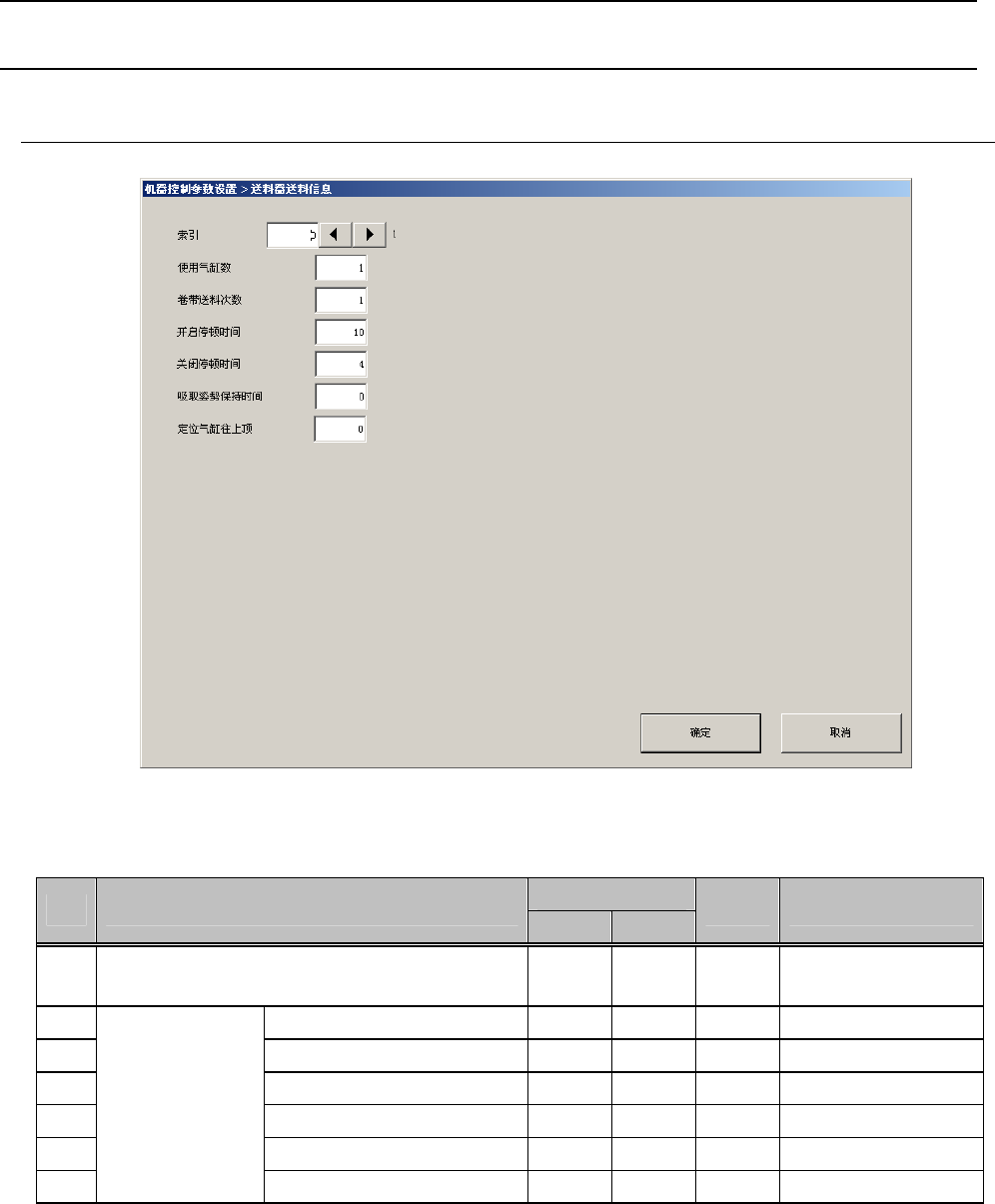
机器控制参数
送料器送料信息
设定项目
输入范围
项目
最小值 最大值
单位 备考
索引
参照 索
引
使用气缸数
卷带送料次数
开启停顿时间
关闭停顿时间
吸取姿勢保持时间
送料器送料信息
定位气缸往上顶 不使用
机器控制参数
索引
类别 内容
宽送
宽 送
宽 送
宽 送
杆状
宽 送
宽 送
杆状
宽 送
宽 送
宽 送
宽 送
宽 送
杆状
杆更换器换料
杆状
杆状
杆状
杆状
杆状
杆状
纸粘结
宽 送
宽 送间距
宽 送间距
宽 送间距
宽 送
宽 送
宽 送
宽 送
宽 送
宽 送
散件供料器
~ 预备
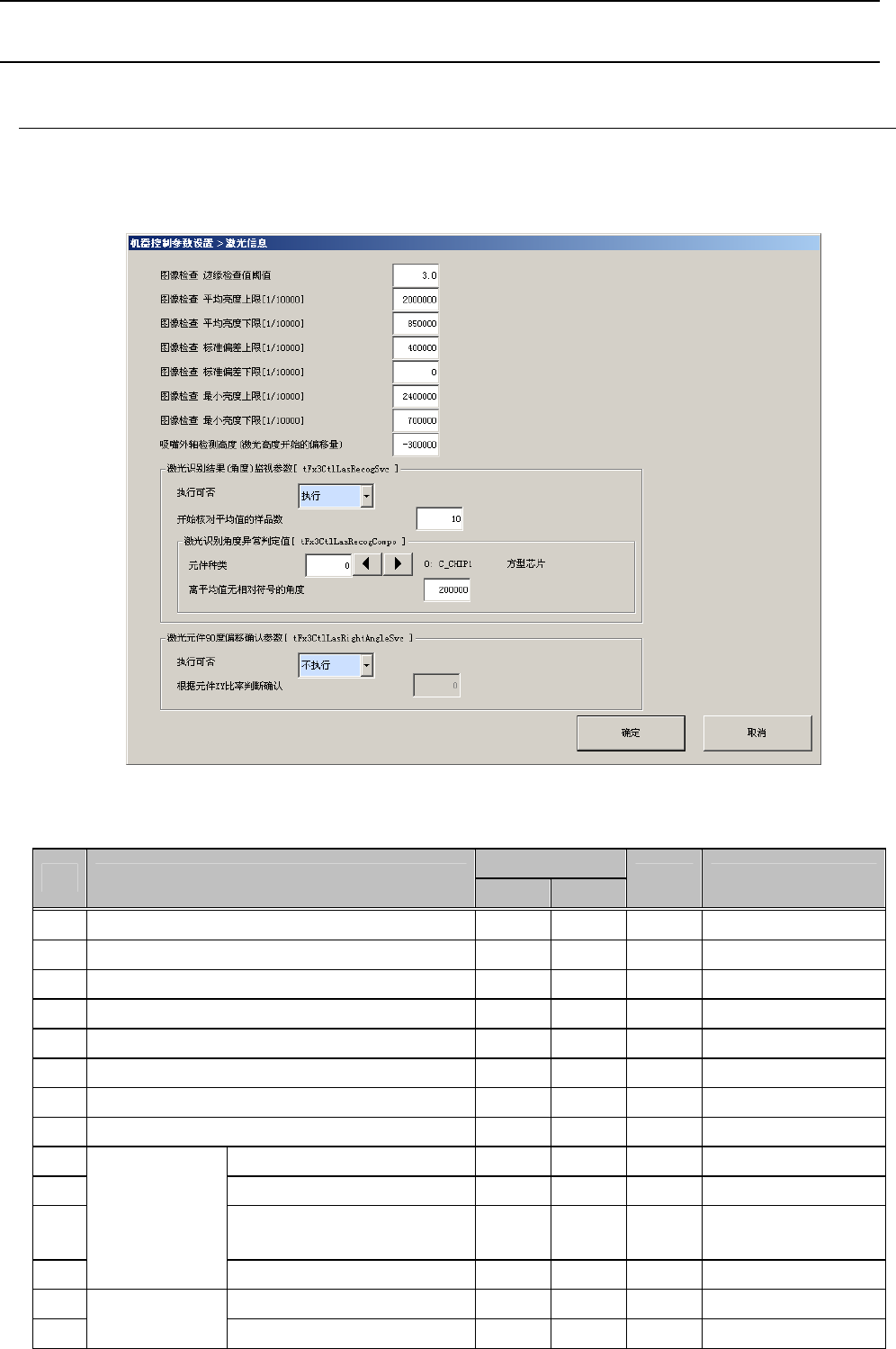
机器控制参数
激光信息
激光识别结果(角度)监视参数的设定通过在执行可否中选择执行使编译成为可能。
激光元件度角度偏移确认参数的设定通过在执行可否中选择执行使编译成为可能。
设定项目
输入范围
项目
最小值 最大值
单位 备考
图像检查 边缘检查值阈值 初期值
图像检查 平均亮度上限 初期值
图像检查 平均亮度下限 初期值
图像检查 标准偏差上限 初期值
图像检查 标准偏差下限 初期值
图像检查 最小亮度上限 初期值
图像检查 最小亮度下限 初期值
吸嘴外轴检测高度激光高度开始的偏移量初期值
执行可否 初始状态 执行
开始核对平均值的样品数 初期值
元件种类
参照 元
件种类
激光识别结果
角度监视参
数
离平均值无相对符号的角度 初期值
执行可否 初始状态 不执行
激光元件度
偏移确认参数
根据元件比率判断确认初期值