FX3_MCP_Rev1.0_C.pdf - 第22页
机器控制参数 伺服参数 设定项目 输入范围 项目 略称 最小值 最大值 单位 备考 厂商设置用 设置 …
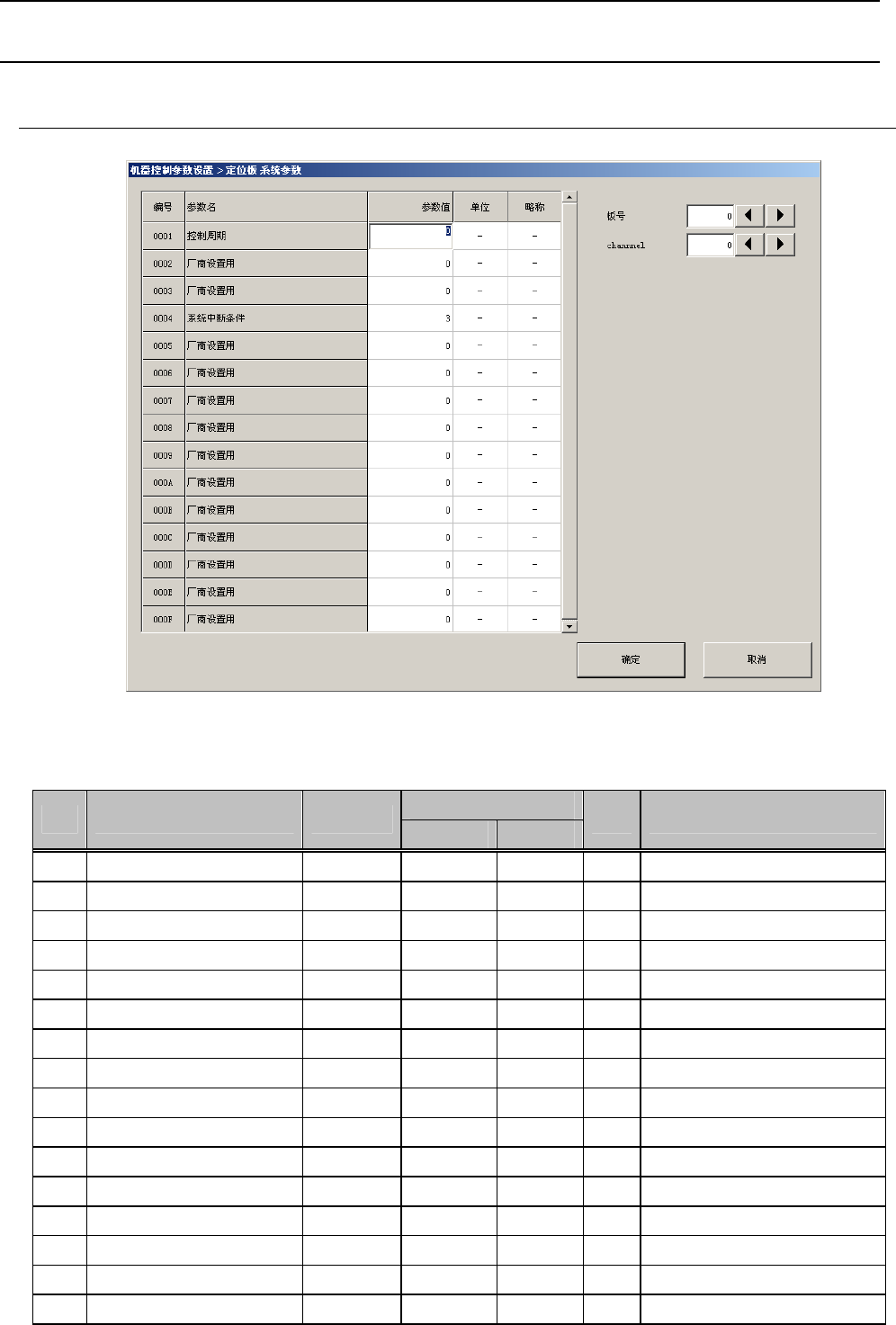
机器控制参数
系统参数
设定项目
输入范围
项目
最小值 最大值
单位 备考
设置 参照设置
控制周期
厂商设置用
厂商设置用
系统中断条件
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
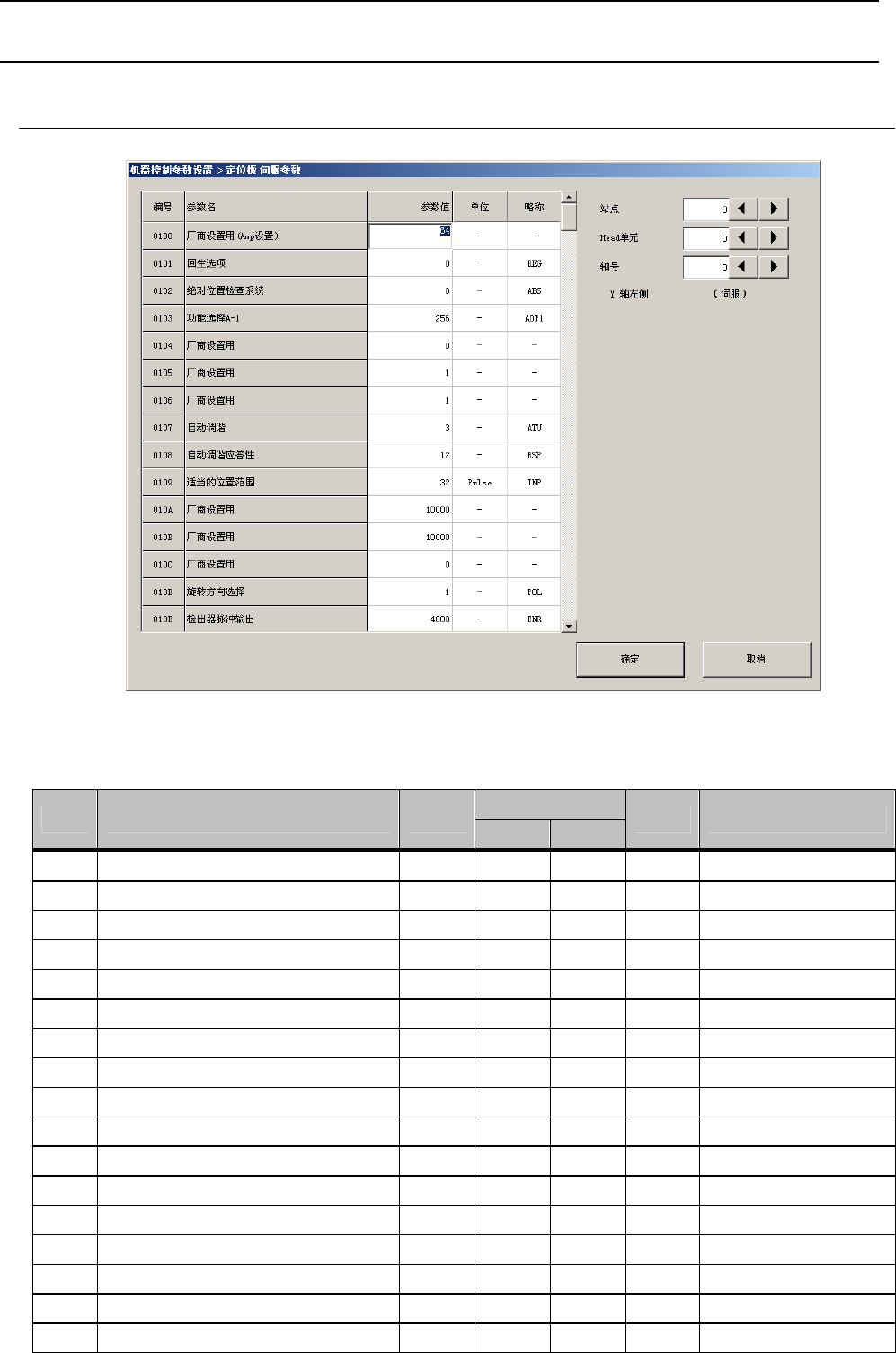
机器控制参数
伺服参数
设定项目
输入范围
项目 略称
最小值 最大值
单位 备考
厂商设置用设置
回生选项
绝对位置检查系统
功能选择
厂商设置用
厂商设置用
厂商设置用
自动调谐
自动调谐应答性
适当的位置范围
厂商设置用
厂商设置用
厂商设置用
旋转方向选择
检出器脉冲输出
检出器脉冲输出
马达系列
机器控制参数
输入范围
项目 略称
最小值 最大值
单位 备考
马达类型
参数只读性
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
厂商设置用
适应性调谐模式
振动控制调谐模式
厂商设置用
前反馈增益
厂商设置用
负荷惯性力矩比
模型控制增益
位置控制增益
速度控制增益
速度积分补偿
速度微分补偿
厂商设置用
机械共振抑制过滤
形状选择
机械共振抑制过滤
形状选择
轴共振控制过滤
低通过滤
振动控制 振動频率设置
振动控制 共振频率设置
厂商设置用
厂商设置用
低通过滤选择
微振動抑制控制选择
厂商设置用