JAKA Zu sp使用手册-中文版.pdf - 第11页
JAKA Zu Sp 1 1 第 5 章 JAKA Zu sp 使 用注意事 项 a. 机器 人末端负载设 置如果存在不 精确的情 况,机器人可 能会出现误报 碰撞的情 况,如果条件 允许,可 以降低机器人 的碰撞灵敏度 ; b. 保证 力觉传感器与 机器人控制器 都配置在 同一网段; c. 保证 机器人基座的 航空插头方向 与传感器 标注的 X+方向一致。
10 JAKA Zu Sp
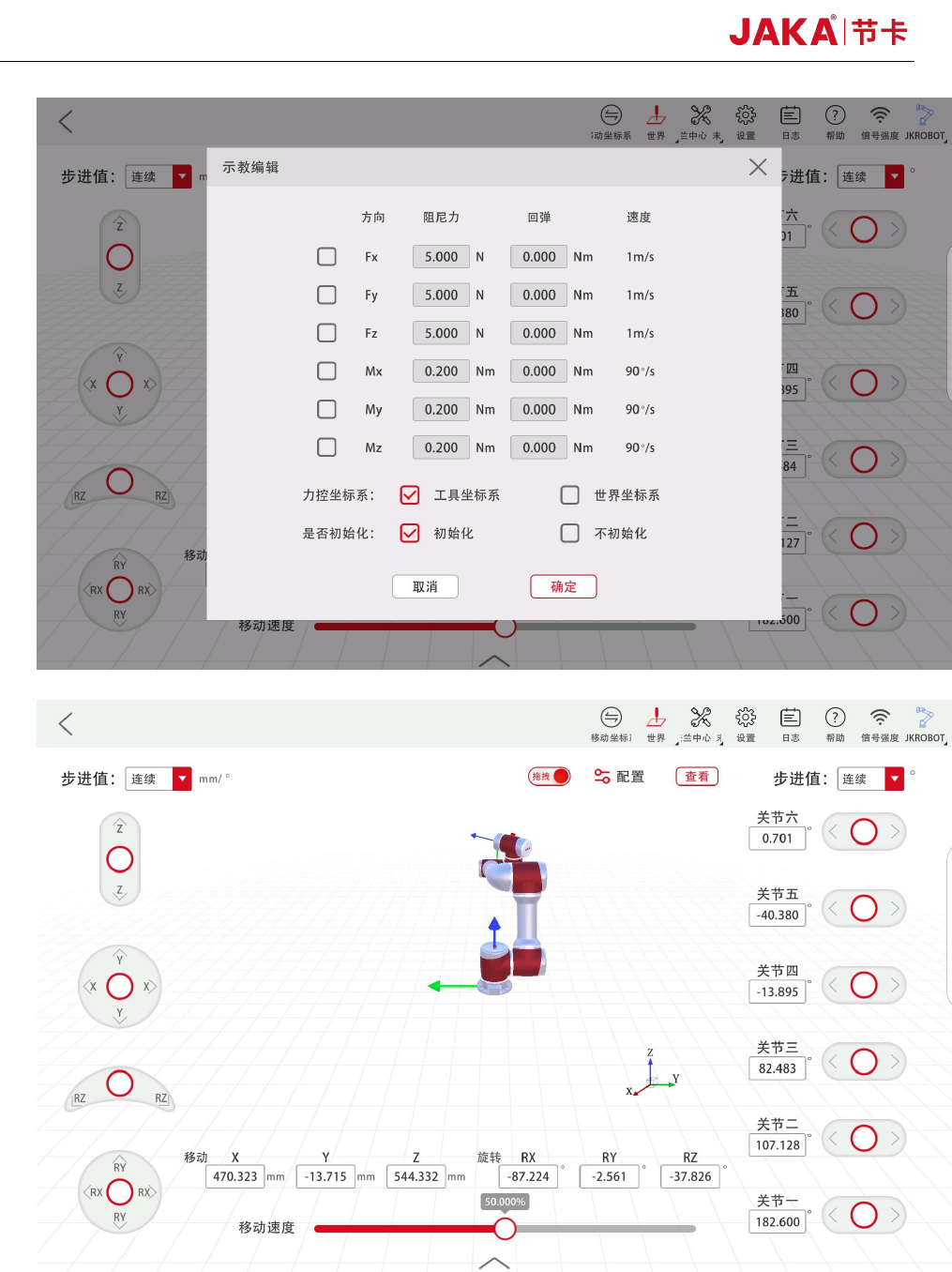
图 6. JAKA Zu sp 牵引示教功能设置
JAKA Zu Sp 11
第 5 章 JAKA Zu sp 使用注意事项
a. 机器人末端负载设置如果存在不精确的情况,机器人可能会出现误报碰撞的情况,如果条件允许,可
以降低机器人的碰撞灵敏度;
b. 保证力觉传感器与机器人控制器都配置在同一网段;
c. 保证机器人基座的航空插头方向与传感器标注的 X+方向一致。
12 JAKA Zu Sp
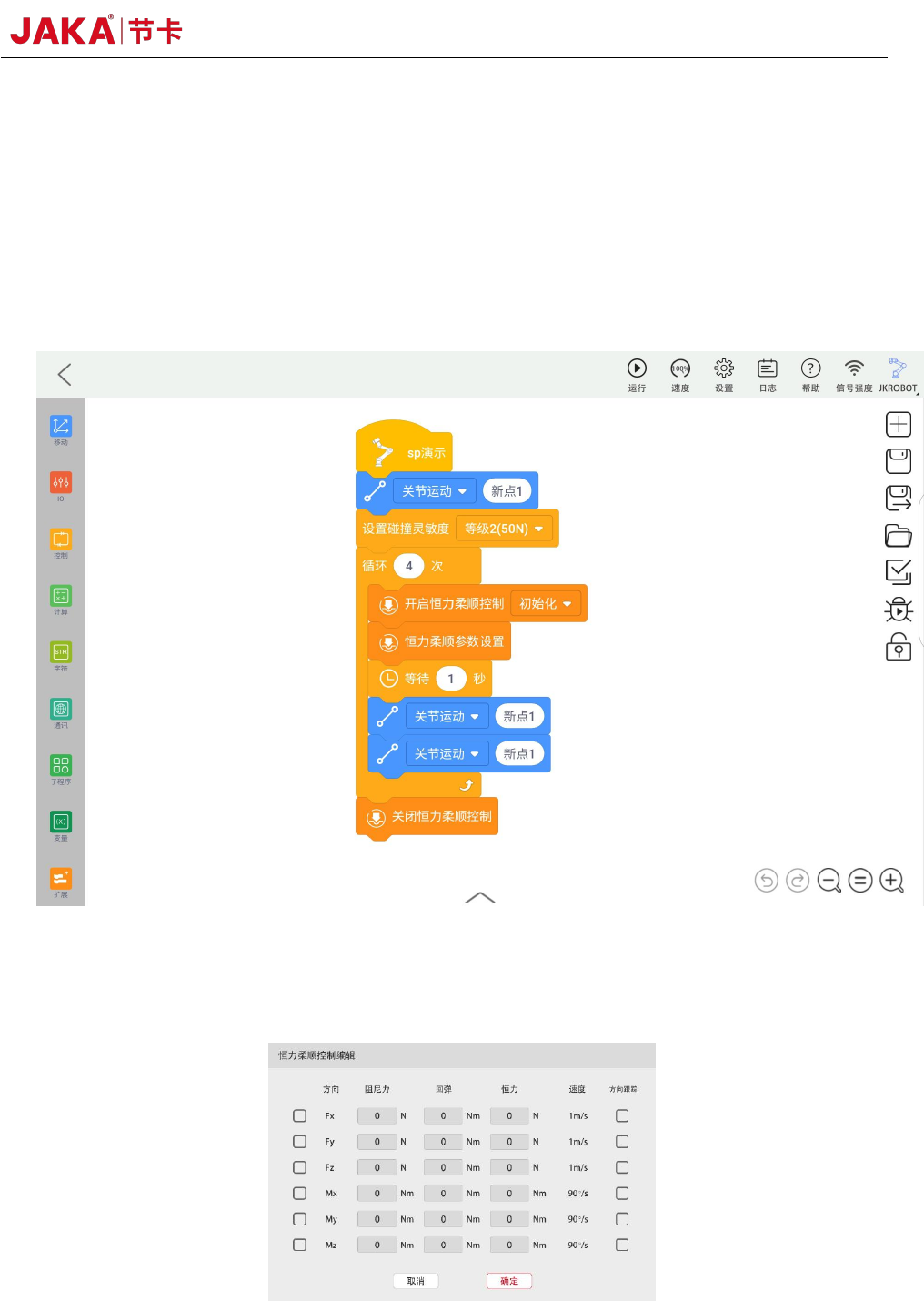
图 7. 力传感器初始化
表 1. 安装螺栓拧紧扭矩参考值
公制
参考扭矩(Nm)
M3
2.00
M4
4.00
M5
8.00
M6
13.00
M8
35.00
M10
45.00
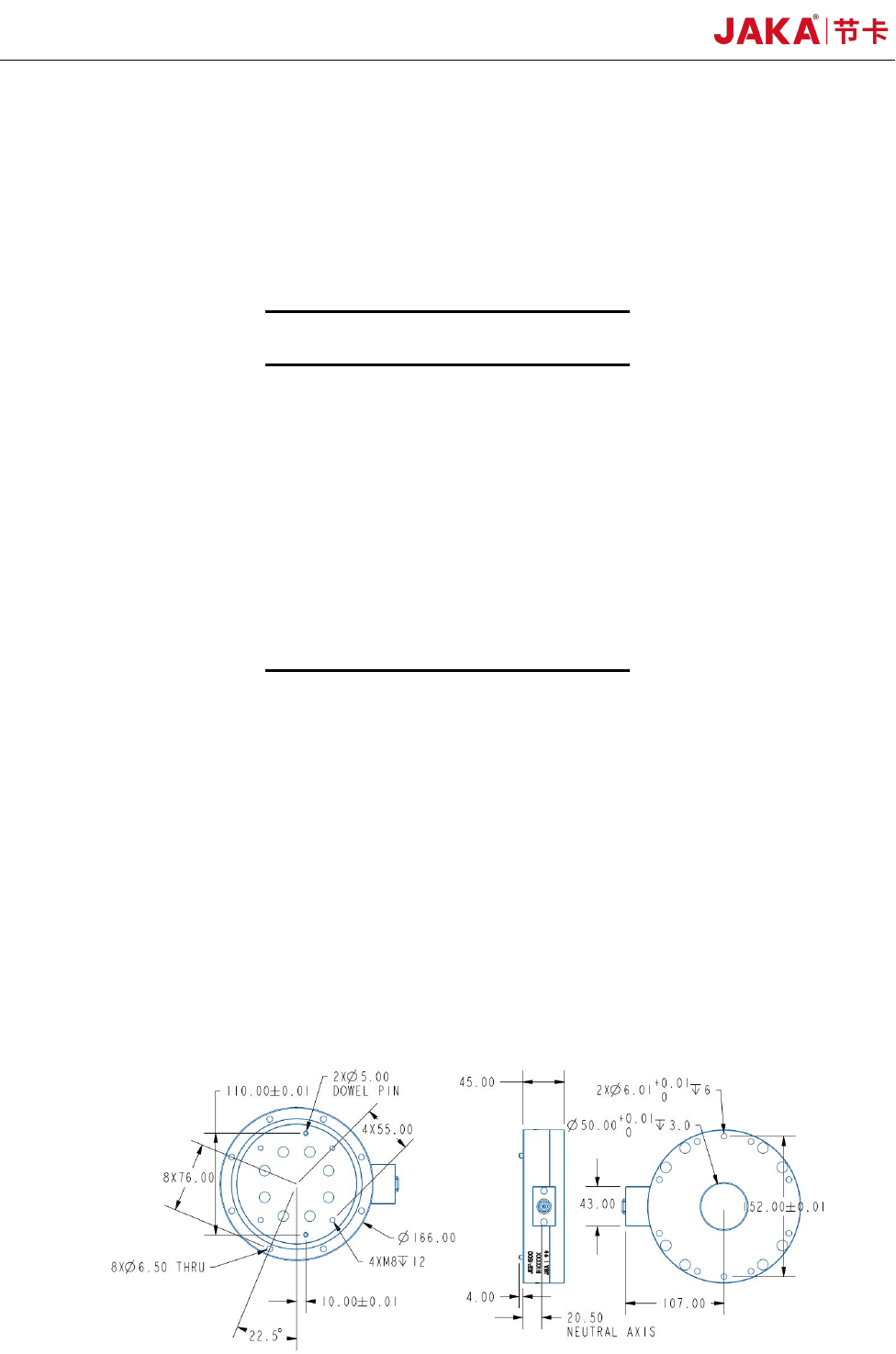
第 6 章 JAKA Zu sp 各型号转接法兰和力传感器尺寸
6.1 JAKA Zu3 sp