JAKA Zu sp使用手册-中文版.pdf - 第8页
8 JAKA Zu Sp

JAKA Zu Sp 7
力传感器可以采用机器人控制器或者客户额外的 24V 直流供电。为保证力传感器信号稳定,屏蔽线和
地线需要同时接地。力传感器通过网线接入路由器,保证机器人的控制器和力觉传感器都配置在同一网段;
在力觉传感器的 APP 编辑界面,设置传感器与机器人控制器的之间的通讯,目前,传感器 IP 已经固
定设置成 192.168.2.108,因此路由器也需要配置成 192.168.2 网段,这样才能建立通讯。客户也可以使
用力觉传感器供应商提供的上位机对传感器的 IP 进行修改。端口号固定设置成 4008。
第 4 章 JAKA Zu sp 使用
a.碰撞检测功能
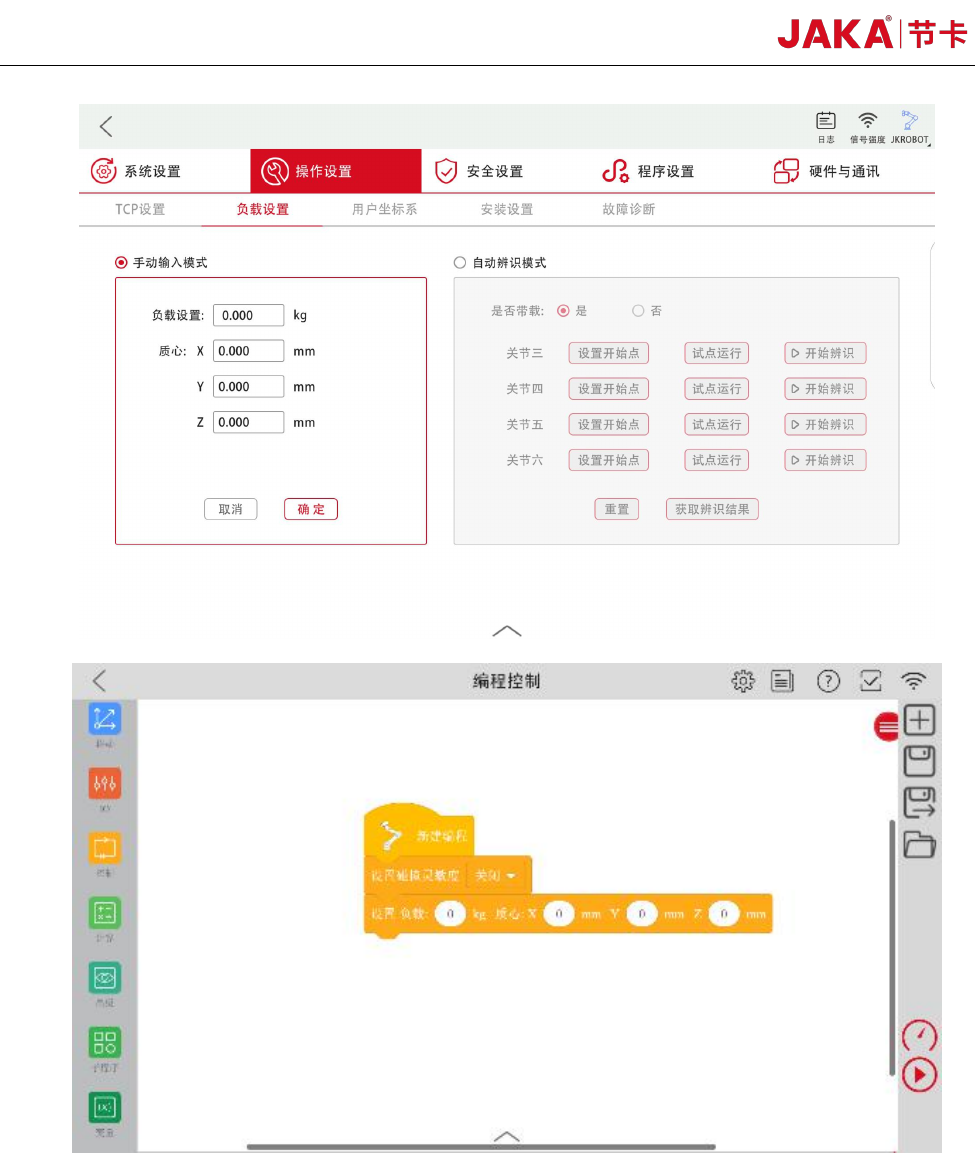
如图 5 所示,设置传感器 IP 和端口号完成后,点击确定,点击【编辑】,切换至运行状态;进入负载
设置界面,在手动模式下设置机器人末端负载的质量和质心,执行程序时,也可以在调用程序模块进行负
载设置;在碰撞保护界面中设置碰撞检测灵敏度等级,等级越高,检测碰撞越不灵敏,执行程序时,如果
机器人末端负载需要变化,需要提前关闭碰撞,重新设置负载完成后,再打开碰撞并设置灵敏度。
8 JAKA Zu Sp

JAKA Zu Sp 9
图 5. JAKA Zu sp 碰撞检测功能设置
b.牵引示教功能
如图 5 所示,设置传感器 IP 和端口号完成后,点击【运行】;进入手动操作界面,点击【配置】,选
择移动的轴方向;点击【拖拽】,可以实现机器人在该方向的慢速牵引示教。【阻尼力】为机器人运动时的
恒定阻力,阻尼力越大,通过牵引示教推动机器人所需要的力就越大。出于安全因素考虑,【阻尼力】建
议大于 40N。【回弹力】会使机器人始终回到开启牵引示教时初始化的位置,并且机器人越远离初始化的位
置,通过牵引示教推动机器人所需要的力就越大。在使用牵引示教时,【回弹力】设置成 0;拖拽过程中如
果出现机器人振动情况,请【退出】拖拽模式,增大阻尼力设置。