JAKA Zu sp使用手册-中文版.pdf - 第6页
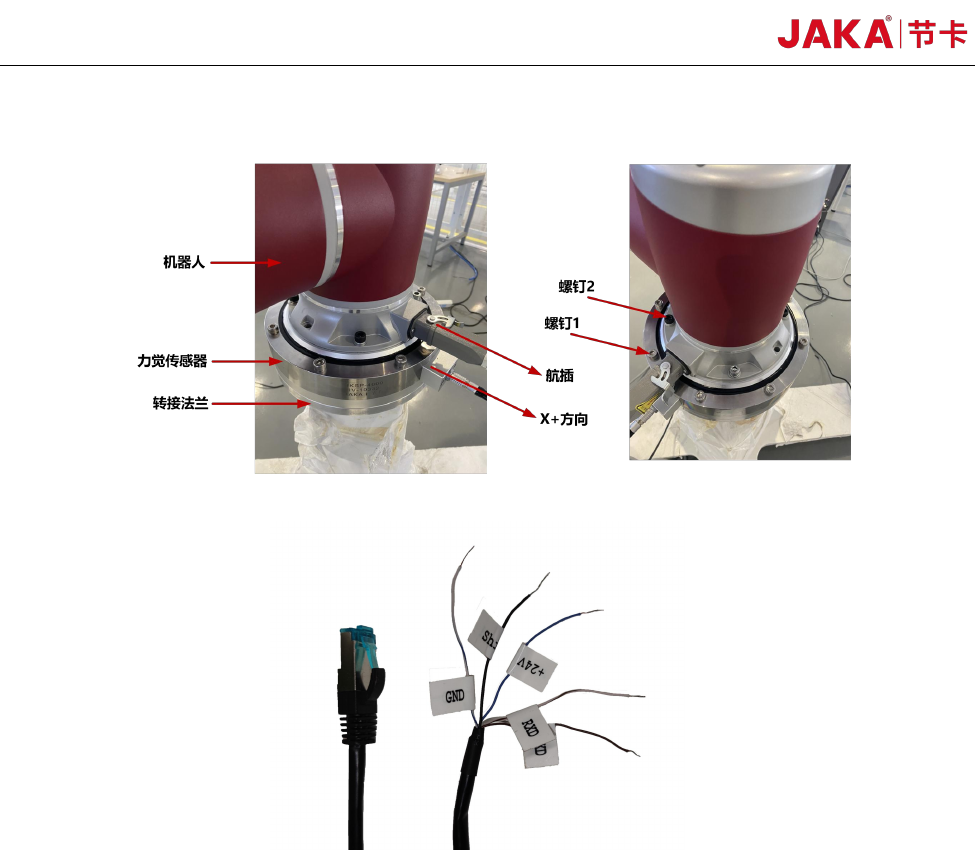
6 JAKA Zu Sp +24V:蓝色 Shiel d:黑色 GND:白蓝 图 4. 力传感器安装示意图 第 3 章 JAK A Z u sp 系 统搭建 如图 2、3 所示,用户需 要简单地硬件 连接和软 件设置,就可 以实现 JAKA Zu sp 系统的搭建, 具体搭 建流程: 客户根据实际 需求设计力觉 传感器与 底座,力觉传 感器与机器人 基座的连 接法兰,保证 安装完成后 , 机器人基座的 航空插头方向 与传感器 标注的 X…
JAKA Zu Sp 5
第 2 章 产品描述
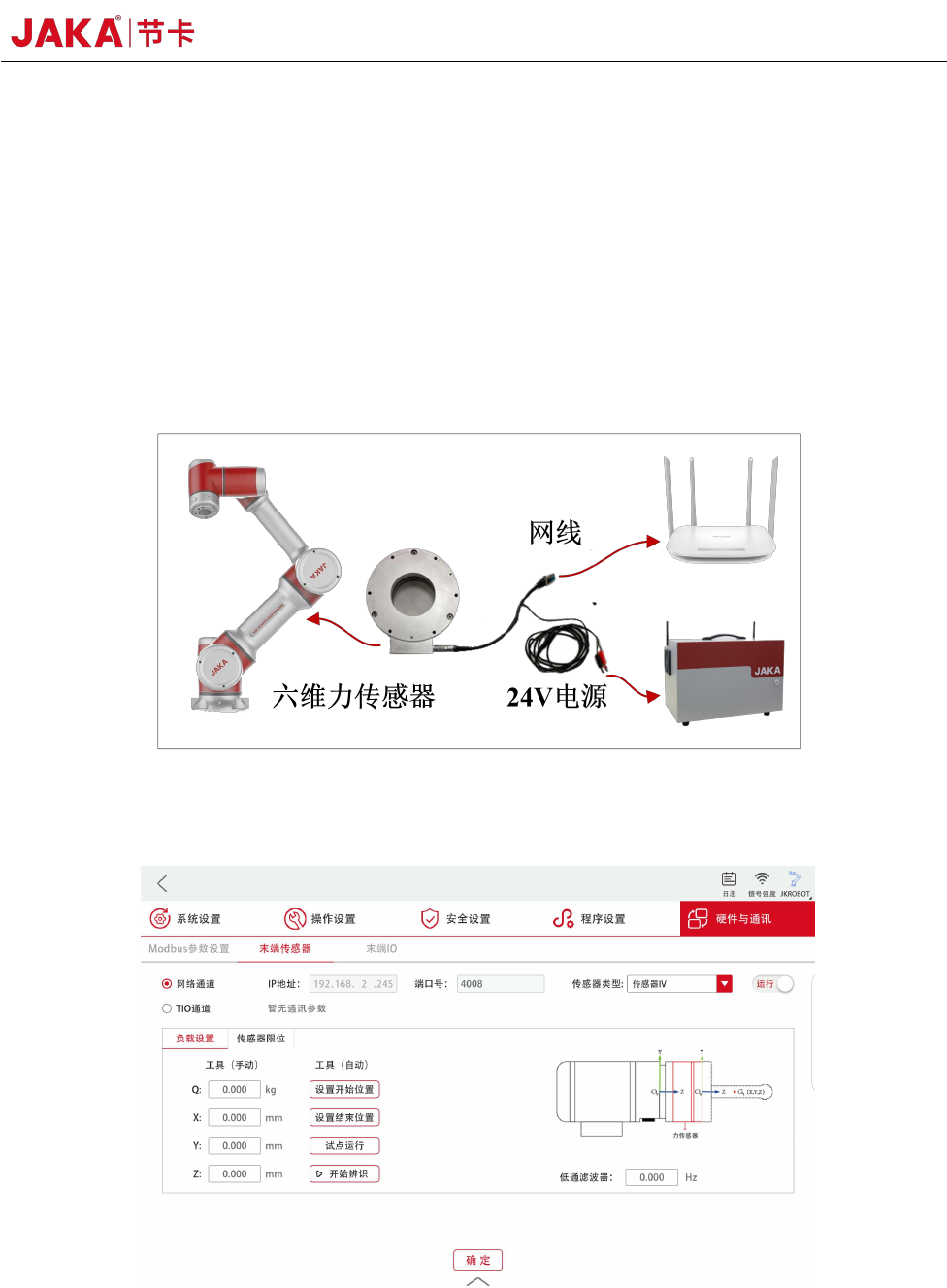
JAKA Zu sp 系统包含 APP、机器人、控制柜和力觉传感器设备。如图 2 所示,力觉传感器设备包括六
维力矩传感器等。软件上的操作通过节卡小助 APP 中的力传感器模块来实现,如图 3 所示
图 2. JAKA Zu sp 系统示意图
图 3. 力传感器模块 APP 设置界面
6 JAKA Zu Sp
+24V:蓝色
Shield:黑色
GND:白蓝
图 4. 力传感器安装示意图
第 3 章 JAKA Zu sp 系统搭建
如图 2、3 所示,用户需要简单地硬件连接和软件设置,就可以实现 JAKA Zu sp 系统的搭建,具体搭
建流程:
客户根据实际需求设计力觉传感器与底座,力觉传感器与机器人基座的连接法兰,保证安装完成后,
机器人基座的航空插头方向与传感器标注的 X+方向一致,注意安装螺丝长度避免压坏力觉传感器。螺钉采
用对角线逐渐拧紧方式,使传感器和转接板均匀接触,拧紧力参考如表 1 所示。转接法兰和力传感器的尺
寸如图 8、图 9 所示。

JAKA Zu Sp 7
力传感器可以采用机器人控制器或者客户额外的 24V 直流供电。为保证力传感器信号稳定,屏蔽线和
地线需要同时接地。力传感器通过网线接入路由器,保证机器人的控制器和力觉传感器都配置在同一网段;
在力觉传感器的 APP 编辑界面,设置传感器与机器人控制器的之间的通讯,目前,传感器 IP 已经固
定设置成 192.168.2.108,因此路由器也需要配置成 192.168.2 网段,这样才能建立通讯。客户也可以使
用力觉传感器供应商提供的上位机对传感器的 IP 进行修改。端口号固定设置成 4008。
第 4 章 JAKA Zu sp 使用
a.碰撞检测功能
如图 5 所示,设置传感器 IP 和端口号完成后,点击确定,点击【编辑】,切换至运行状态;进入负载
设置界面,在手动模式下设置机器人末端负载的质量和质心,执行程序时,也可以在调用程序模块进行负
载设置;在碰撞保护界面中设置碰撞检测灵敏度等级,等级越高,检测碰撞越不灵敏,执行程序时,如果
机器人末端负载需要变化,需要提前关闭碰撞,重新设置负载完成后,再打开碰撞并设置灵敏度。